Вам также может понравиться
- Application For Empanelment of Real Estate AgenciesДокумент1 страницаApplication For Empanelment of Real Estate AgenciesAnoop MathewОценок пока нет
- JournalДокумент2 страницыJournalAnoop MathewОценок пока нет
- Artsenz Biz PlanДокумент1 страницаArtsenz Biz PlanAnoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch28Документ26 страницPower Electronics Ned Mohan Slides Ch28Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch25Документ17 страницPower Electronics Ned Mohan Slides Ch25Anoop MathewОценок пока нет
- ApplicationДокумент4 страницыApplicationAnoop MathewОценок пока нет
- 1) List of Important Details (Indian LLP)Документ4 страницы1) List of Important Details (Indian LLP)Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch29Документ12 страницPower Electronics Ned Mohan Slides Ch29Anoop MathewОценок пока нет
- DC Machine Armature Reaction and CommutationДокумент4 страницыDC Machine Armature Reaction and CommutationAnoop MathewОценок пока нет
- Power Electronics Slides and Notes DC ConvertersДокумент40 страницPower Electronics Slides and Notes DC ConvertersAnoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch30Документ48 страницPower Electronics Ned Mohan Slides Ch30Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch27Документ24 страницыPower Electronics Ned Mohan Slides Ch27Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch19Документ17 страницPower Electronics Ned Mohan Slides Ch19Anoop MathewОценок пока нет
- Thyristors (SCRS) : Lecture NotesДокумент14 страницThyristors (SCRS) : Lecture NotesBeverly PamanОценок пока нет
- Power Electronics Ned Mohan Slides Ch26Документ44 страницыPower Electronics Ned Mohan Slides Ch26Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch28Документ26 страницPower Electronics Ned Mohan Slides Ch28Anoop MathewОценок пока нет
- Gate Turn-Off Thyristors (GTOS) : Lecture NotesДокумент7 страницGate Turn-Off Thyristors (GTOS) : Lecture NoteschethanОценок пока нет
- Power Electronics Ned Mohan Slides Ch22Документ35 страницPower Electronics Ned Mohan Slides Ch22Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch30Документ48 страницPower Electronics Ned Mohan Slides Ch30Anoop MathewОценок пока нет
- CH 20Документ27 страницCH 20avi013Оценок пока нет
- Utility Interface: - Power Quality Has Become An Important IssueДокумент20 страницUtility Interface: - Power Quality Has Become An Important Issueapi-3705260Оценок пока нет
- Power Electronics Ned Mohan Slides Ch21Документ27 страницPower Electronics Ned Mohan Slides Ch21Anoop MathewОценок пока нет
- Electric Utility Applications: - These Applications Are Growing RapidlyДокумент18 страницElectric Utility Applications: - These Applications Are Growing Rapidlyapi-3705260Оценок пока нет
- Power Electronics Ned Mohan Slides Ch29Документ12 страницPower Electronics Ned Mohan Slides Ch29Anoop MathewОценок пока нет
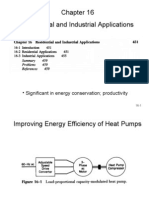
- Residential and Industrial Applications: - Significant in Energy Conservation ProductivityДокумент11 страницResidential and Industrial Applications: - Significant in Energy Conservation Productivityapi-3705260Оценок пока нет
- Power Electronics Ned Mohan Slides Ch26Документ44 страницыPower Electronics Ned Mohan Slides Ch26Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch1Документ12 страницPower Electronics Ned Mohan Slides Ch1Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch25Документ17 страницPower Electronics Ned Mohan Slides Ch25Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch27Документ24 страницыPower Electronics Ned Mohan Slides Ch27Anoop MathewОценок пока нет
- Gate Turn-Off Thyristors (GTOS) : Lecture NotesДокумент7 страницGate Turn-Off Thyristors (GTOS) : Lecture NoteschethanОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- C Exam13Документ4 страницыC Exam13gauravsoni1991Оценок пока нет
- CGV 18cs67 Lab ManualДокумент45 страницCGV 18cs67 Lab ManualNagamani DОценок пока нет
- BoQ East Park Apartment Buaran For ContractorДокумент36 страницBoQ East Park Apartment Buaran For ContractorDhiangga JauharyОценок пока нет
- Laws of MotionДокумент64 страницыLaws of MotionArnel A. JulatonОценок пока нет
- PWC Global Project Management Report SmallДокумент40 страницPWC Global Project Management Report SmallDaniel MoraОценок пока нет
- Lesson 2 Mathematics Curriculum in The Intermediate GradesДокумент15 страницLesson 2 Mathematics Curriculum in The Intermediate GradesRose Angel Manaog100% (1)
- SiBRAIN For PIC PIC18F57Q43 SchematicДокумент1 страницаSiBRAIN For PIC PIC18F57Q43 Schematicivanfco11Оценок пока нет
- IELTS Vocabulary ExpectationДокумент3 страницыIELTS Vocabulary ExpectationPham Ba DatОценок пока нет
- Calibration Motion Control System-Part2 PDFДокумент6 страницCalibration Motion Control System-Part2 PDFnurhazwaniОценок пока нет
- PW CДокумент4 страницыPW CAnonymous DduElf20OОценок пока нет
- ASTM D256-10 - Standard Test Methods For Determining The Izod Pendulum Impact Resistance of PlasticsДокумент20 страницASTM D256-10 - Standard Test Methods For Determining The Izod Pendulum Impact Resistance of PlasticsEng. Emílio DechenОценок пока нет
- Diemberger CV 2015Документ6 страницDiemberger CV 2015TimОценок пока нет
- Username: Password:: 4193 Votes 9 Days OldДокумент6 страницUsername: Password:: 4193 Votes 9 Days OldΘώμηΜπουμπαρηОценок пока нет
- Deep Groove Ball Bearings PDFДокумент11 страницDeep Groove Ball Bearings PDFArpit VermaОценок пока нет
- Hawk Technology Systems v. NCLДокумент6 страницHawk Technology Systems v. NCLPriorSmartОценок пока нет
- NameДокумент5 страницNameMaine DagoyОценок пока нет
- 27 MARCH 2020: Assignment 5 Question PaperДокумент4 страницы27 MARCH 2020: Assignment 5 Question PaperShadreck SandweОценок пока нет
- Symmetry (Planes Of)Документ37 страницSymmetry (Planes Of)carolinethami13Оценок пока нет
- May, 2013Документ10 страницMay, 2013Jakob Maier100% (1)
- PREMIUM BINS, CARDS & STUFFДокумент4 страницыPREMIUM BINS, CARDS & STUFFSubodh Ghule100% (1)
- TLE8 Q4 Week 8 As Food ProcessingДокумент4 страницыTLE8 Q4 Week 8 As Food ProcessingROSELLE CASELAОценок пока нет
- English Week3 PDFДокумент4 страницыEnglish Week3 PDFLucky GeminaОценок пока нет
- Microsoft Word 2000 IntroductionДокумент72 страницыMicrosoft Word 2000 IntroductionYsmech SalazarОценок пока нет
- SEO Design ExamplesДокумент10 страницSEO Design ExamplesAnonymous YDwBCtsОценок пока нет
- Insize Catalogue 2183,2392Документ1 страницаInsize Catalogue 2183,2392calidadcdokepОценок пока нет
- Judge Vest Printable PatternДокумент24 страницыJudge Vest Printable PatternMomОценок пока нет
- PCSE_WorkbookДокумент70 страницPCSE_WorkbookWilliam Ribeiro da SilvaОценок пока нет
- Sekolah Menengah Kebangsaan Ss17 JALAN SS17/1, Subang Jaya English Scheme of Work Form 3Документ11 страницSekolah Menengah Kebangsaan Ss17 JALAN SS17/1, Subang Jaya English Scheme of Work Form 3Rohana YahyaОценок пока нет
- Childrens Ideas Science0Документ7 страницChildrens Ideas Science0Kurtis HarperОценок пока нет
- Philips DVD Player SpecificationsДокумент2 страницыPhilips DVD Player Specificationsbhau_20Оценок пока нет