Вам также может понравиться
- PSCAD Simulation Model of D-Statcom For Voltage Sag ImprovementДокумент4 страницыPSCAD Simulation Model of D-Statcom For Voltage Sag ImprovementposeidondzОценок пока нет
- Analysis and Assessment of STATCOM-based Damping Stabilizers For Power System Stability EnhancementДокумент9 страницAnalysis and Assessment of STATCOM-based Damping Stabilizers For Power System Stability EnhancementabubakarОценок пока нет
- Analysis and Assessment of STATCOM-based Damping Stabilizers For Power System Stability EnhancementДокумент9 страницAnalysis and Assessment of STATCOM-based Damping Stabilizers For Power System Stability EnhancementsirageldeenОценок пока нет
- 11 Robust Control of 2 Level12 PulseДокумент7 страниц11 Robust Control of 2 Level12 PulseRavi JainОценок пока нет
- Djagarov EEEIC 2012Документ6 страницDjagarov EEEIC 2012jagarov4954Оценок пока нет
- Gobind KSR Conf PaperДокумент7 страницGobind KSR Conf PaperRagul DuraisamyОценок пока нет
- Design of A Fuzzy Logic Controller Based STATCOM For IEEEДокумент6 страницDesign of A Fuzzy Logic Controller Based STATCOM For IEEEharini shivОценок пока нет
- Power System Dynamic Performance With STATCOM Controller: Mfareed@kfupm - Edu.sa Ahrahim@kfupm - Edu.saДокумент5 страницPower System Dynamic Performance With STATCOM Controller: Mfareed@kfupm - Edu.sa Ahrahim@kfupm - Edu.sapragatinareshОценок пока нет
- Comparative Study of Different Control Strategies For DstatcomДокумент7 страницComparative Study of Different Control Strategies For DstatcomAmmuRaОценок пока нет
- A Novel Feedback Linearizing Statcom Controller For Power System DampingДокумент11 страницA Novel Feedback Linearizing Statcom Controller For Power System DampingHalim TlemçaniОценок пока нет
- Transient Modelling of STATCOMДокумент6 страницTransient Modelling of STATCOMSwechhya kafleОценок пока нет
- Stability Enhancement in HVDC System With STATCOM: Chan-Ki Kim, Jin-Young Kim, Sung-Doo Lee, Eung-Bo SimДокумент10 страницStability Enhancement in HVDC System With STATCOM: Chan-Ki Kim, Jin-Young Kim, Sung-Doo Lee, Eung-Bo Simbaskaranjay5502Оценок пока нет
- Stabilization of Gird Connected Wind Generator During Power Network Disturbances by StatcomДокумент5 страницStabilization of Gird Connected Wind Generator During Power Network Disturbances by StatcomAmit DebnathОценок пока нет
- IEEE Power System Paper-Investigation of Voltage Regulation Stability of Static Synchronous CompensatorДокумент6 страницIEEE Power System Paper-Investigation of Voltage Regulation Stability of Static Synchronous CompensatorAnoop MathewОценок пока нет
- Shunt Compensation For Power Quality Improvement Using A Statcom ControllerДокумент5 страницShunt Compensation For Power Quality Improvement Using A Statcom ControllericaroigorОценок пока нет
- Cascaded Control of A Multilevel STATCOM For Reactive Power CompensationДокумент13 страницCascaded Control of A Multilevel STATCOM For Reactive Power CompensationSudheer KethamreddyОценок пока нет
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОценок пока нет
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetРейтинг: 2 из 5 звезд2/5 (1)
- Simulated Control System Design of A Multilevel STATCOM For Reactive Power CompensationДокумент6 страницSimulated Control System Design of A Multilevel STATCOM For Reactive Power CompensationIJIRSTОценок пока нет
- Design and Analysis of Adaptive Neural Controller For Voltage Source Converter For STATCOMДокумент5 страницDesign and Analysis of Adaptive Neural Controller For Voltage Source Converter For STATCOMIDESОценок пока нет
- Statcp, XdsadsadsadasasdsadsadsadsadsadsadsadДокумент6 страницStatcp, Xdsadsadsadasasdsadsadsadsadsadsadsadrathorsumit2006Оценок пока нет
- Multi Level Statcom For Harmonic ReductionДокумент8 страницMulti Level Statcom For Harmonic ReductionInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- On FACTSДокумент33 страницыOn FACTSAravind Babu100% (1)
- A Minimal Harmonic Controller For A STATCOMДокумент10 страницA Minimal Harmonic Controller For A STATCOMAnonymous zfmlsb2GjAОценок пока нет
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorОт EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorОценок пока нет
- Analysis and Modelling of Static Synchronous Compensator (STATCOM) : A Comparison of Power Injection and Current Injection Models in Power Flow StudyДокумент12 страницAnalysis and Modelling of Static Synchronous Compensator (STATCOM) : A Comparison of Power Injection and Current Injection Models in Power Flow StudysirageldeenОценок пока нет
- SelectionДокумент5 страницSelectionVinod Kumar VudathaОценок пока нет
- Indirect Control Techniques For Cascaded Multilevel Inverter (CMLI) STATCOM:A ReviewДокумент4 страницыIndirect Control Techniques For Cascaded Multilevel Inverter (CMLI) STATCOM:A ReviewRavinder RangaОценок пока нет
- Performance Comparison Between SVC and STATCOM For Reactive Power Compensation by Using Fuzzy Logic ControllerДокумент4 страницыPerformance Comparison Between SVC and STATCOM For Reactive Power Compensation by Using Fuzzy Logic ControllerShiva PaddamОценок пока нет
- 39 Submission 1Документ14 страниц39 Submission 1Thimothy BasavaОценок пока нет
- Pscad PV THDДокумент6 страницPscad PV THDRavishankar KankaleОценок пока нет
- Fault Distribution GoodДокумент6 страницFault Distribution GoodSiva Ganesh MallaОценок пока нет
- Modeling, Simulation and Control of D-Statcom Using Atp/EmtpДокумент4 страницыModeling, Simulation and Control of D-Statcom Using Atp/EmtpKalyan SrinivasОценок пока нет
- IOSR JournalsДокумент6 страницIOSR JournalsInternational Organization of Scientific Research (IOSR)Оценок пока нет
- Transient Stability Improvement Using Upfc and SVCДокумент8 страницTransient Stability Improvement Using Upfc and SVCSai Bhargav VeerabathiniОценок пока нет
- STATCOM Control For Power System Voltage Control ApplicationsДокумент7 страницSTATCOM Control For Power System Voltage Control ApplicationssirageldeenОценок пока нет
- DSTATCOM Control Algorithms: A Review: International Journal of Power Electronics and Drive System (IJPEDS)Документ12 страницDSTATCOM Control Algorithms: A Review: International Journal of Power Electronics and Drive System (IJPEDS)AmmuRaОценок пока нет
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlОт EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlРейтинг: 5 из 5 звезд5/5 (1)
- Modelling and Analysis of Custom Power Devices For Improve Power QualityДокумент6 страницModelling and Analysis of Custom Power Devices For Improve Power Qualitytaner56Оценок пока нет
- Dynamic Coordination Strategies Between HVDC and STATCOM: Chan-Ki Kim, Vijay Sood, and Seok-Jin LeeДокумент11 страницDynamic Coordination Strategies Between HVDC and STATCOM: Chan-Ki Kim, Vijay Sood, and Seok-Jin LeeArmand NicheuОценок пока нет
- J. Basic. Appl. Sci. Res., 1 (12) 2908-2915, 2011Документ8 страницJ. Basic. Appl. Sci. Res., 1 (12) 2908-2915, 2011MostafaHeshmatОценок пока нет
- IOSR - JEEE ProceedingsДокумент56 страницIOSR - JEEE ProceedingsVlad MocanuОценок пока нет
- Modeling and Simulation of D-STATCOM For Voltage Regulation Imparting Various Control Strategies - Dhananjay Mishra - AcademiaДокумент5 страницModeling and Simulation of D-STATCOM For Voltage Regulation Imparting Various Control Strategies - Dhananjay Mishra - AcademiaSwapnilMahajanОценок пока нет
- Voltage Stability With The Help of STATCOMДокумент6 страницVoltage Stability With The Help of STATCOMijsretОценок пока нет
- Power SystemДокумент6 страницPower SystemGaurav KumarОценок пока нет
- An Adaptive Power Oscillation Damping Controllerby STATCOM With Energy StorageДокумент10 страницAn Adaptive Power Oscillation Damping Controllerby STATCOM With Energy StorageChristian EmenikeОценок пока нет
- International Journal of Engineering Research and Development (IJERD)Документ7 страницInternational Journal of Engineering Research and Development (IJERD)IJERDОценок пока нет
- Hassan SOSEДокумент6 страницHassan SOSEedgarsierraОценок пока нет
- The Distribution STATCOM For Reducing The Effect of Voltage Sag SwellДокумент6 страницThe Distribution STATCOM For Reducing The Effect of Voltage Sag SwellSavreet OttalОценок пока нет
- Improved Power Quality For Renewable Power Generation Systems Presence of Non-Linear LoadsДокумент6 страницImproved Power Quality For Renewable Power Generation Systems Presence of Non-Linear LoadsPhanikumar Bellam KondaОценок пока нет
- Design, Testing, and Analysis of STATCOM and TCSC For Real-Time SimulationДокумент19 страницDesign, Testing, and Analysis of STATCOM and TCSC For Real-Time Simulationtien chau minhОценок пока нет
- Control and Performance of A Medium-Voltage Cascade H-Bridge STATCOMДокумент5 страницControl and Performance of A Medium-Voltage Cascade H-Bridge STATCOMvinay kumarОценок пока нет
- Static Synchronous Series Compensator Using AДокумент4 страницыStatic Synchronous Series Compensator Using ASai Bhargav VeerabathiniОценок пока нет
- Q StatcomДокумент18 страницQ StatcomHesham A. HazaymehОценок пока нет
- Design, Analysis and Simulation of Linear Model of A STATCOM For Reactive Power Compensation With Variation of DC-link VoltageДокумент7 страницDesign, Analysis and Simulation of Linear Model of A STATCOM For Reactive Power Compensation With Variation of DC-link VoltageAtiqMarwatОценок пока нет
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveДокумент5 страницDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourОценок пока нет
- Statcom FPA - IJETДокумент6 страницStatcom FPA - IJETsrikanth velpulaОценок пока нет
- Performance Analysis of 48-Pulse VSC-Based STATCOM in Mitigation of Voltage Dip Caused by The Starting of A High Power Induction-MotorДокумент5 страницPerformance Analysis of 48-Pulse VSC-Based STATCOM in Mitigation of Voltage Dip Caused by The Starting of A High Power Induction-MotorIJERDОценок пока нет
- A Control Method For SVPWM-based STATCOMДокумент6 страницA Control Method For SVPWM-based STATCOMJothsna PraveenaОценок пока нет
- MainДокумент6 страницMainRaviraj KumbharОценок пока нет
- Application For Empanelment of Real Estate AgenciesДокумент1 страницаApplication For Empanelment of Real Estate AgenciesAnoop MathewОценок пока нет
- Power Electronics Slides and Notes DC ConvertersДокумент40 страницPower Electronics Slides and Notes DC ConvertersAnoop MathewОценок пока нет
- JournalДокумент2 страницыJournalAnoop MathewОценок пока нет
- Artsenz Biz PlanДокумент1 страницаArtsenz Biz PlanAnoop MathewОценок пока нет
- Armature Reaction and CommutationДокумент4 страницыArmature Reaction and CommutationAnoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch30Документ48 страницPower Electronics Ned Mohan Slides Ch30Anoop MathewОценок пока нет
- ApplicationДокумент4 страницыApplicationAnoop MathewОценок пока нет
- 1) List of Important Details (Indian LLP)Документ4 страницы1) List of Important Details (Indian LLP)Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch26Документ44 страницыPower Electronics Ned Mohan Slides Ch26Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch27Документ24 страницыPower Electronics Ned Mohan Slides Ch27Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch28Документ26 страницPower Electronics Ned Mohan Slides Ch28Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch29Документ12 страницPower Electronics Ned Mohan Slides Ch29Anoop MathewОценок пока нет
- Gate Turn-Off Thyristors (GTOS) : Lecture NotesДокумент7 страницGate Turn-Off Thyristors (GTOS) : Lecture NoteschethanОценок пока нет
- Power Electronics Ned Mohan Slides Ch25Документ17 страницPower Electronics Ned Mohan Slides Ch25Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch19Документ17 страницPower Electronics Ned Mohan Slides Ch19Anoop MathewОценок пока нет
- Utility Interface: - Power Quality Has Become An Important IssueДокумент20 страницUtility Interface: - Power Quality Has Become An Important Issueapi-3705260Оценок пока нет
- Power Electronics Ned Mohan Slides Ch21Документ27 страницPower Electronics Ned Mohan Slides Ch21Anoop MathewОценок пока нет
- Thyristors (SCRS) : Lecture NotesДокумент14 страницThyristors (SCRS) : Lecture NotesBeverly PamanОценок пока нет
- Power Electronics Ned Mohan Slides Ch22Документ35 страницPower Electronics Ned Mohan Slides Ch22Anoop MathewОценок пока нет
- CH 20Документ27 страницCH 20avi013Оценок пока нет
- Power Electronics Ned Mohan Slides Ch30Документ48 страницPower Electronics Ned Mohan Slides Ch30Anoop MathewОценок пока нет
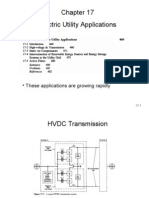
- Electric Utility Applications: - These Applications Are Growing RapidlyДокумент18 страницElectric Utility Applications: - These Applications Are Growing Rapidlyapi-3705260Оценок пока нет
- Residential and Industrial Applications: - Significant in Energy Conservation ProductivityДокумент11 страницResidential and Industrial Applications: - Significant in Energy Conservation Productivityapi-3705260Оценок пока нет
- Power Electronics Ned Mohan Slides Ch29Документ12 страницPower Electronics Ned Mohan Slides Ch29Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch26Документ44 страницыPower Electronics Ned Mohan Slides Ch26Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch1Документ12 страницPower Electronics Ned Mohan Slides Ch1Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch27Документ24 страницыPower Electronics Ned Mohan Slides Ch27Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch28Документ26 страницPower Electronics Ned Mohan Slides Ch28Anoop MathewОценок пока нет
- Power Electronics Ned Mohan Slides Ch25Документ17 страницPower Electronics Ned Mohan Slides Ch25Anoop MathewОценок пока нет
- Gate Turn-Off Thyristors (GTOS) : Lecture NotesДокумент7 страницGate Turn-Off Thyristors (GTOS) : Lecture NoteschethanОценок пока нет
- QuantumДокумент15 страницQuantumThakuri Praveen ChandОценок пока нет
- Chapter 6 (CONT') : Application: Powers of Matrices and Their Applications. 1 Powers of MatricesДокумент9 страницChapter 6 (CONT') : Application: Powers of Matrices and Their Applications. 1 Powers of MatricesHafeezul RaziqОценок пока нет
- Structural VibrationsДокумент162 страницыStructural VibrationsAmit Kumar BishwakarmaОценок пока нет
- 18MAT11 NEW Notes ViaДокумент141 страница18MAT11 NEW Notes ViadrjayakumarhnaikОценок пока нет
- The QR Method For Finding Eigenvalues: Text Reference: Section 6.4, P. 400Документ4 страницыThe QR Method For Finding Eigenvalues: Text Reference: Section 6.4, P. 400sadasvОценок пока нет
- RPS ALJABAR LINIER 2 EditedДокумент10 страницRPS ALJABAR LINIER 2 EditedAeron luther BataraОценок пока нет
- CPSC 542f NotesДокумент10 страницCPSC 542f NotesSofia VegaОценок пока нет
- Hobsonajjustthemaths20021296smcetp PDFДокумент1 296 страницHobsonajjustthemaths20021296smcetp PDFAIvan DCam G0% (1)
- Math University Postgraduate TestДокумент2 страницыMath University Postgraduate TestPrimagama KemilingОценок пока нет
- TrackEye - Real-Time Tracking of Human Eyes Using A Webcam - CodeProjectДокумент11 страницTrackEye - Real-Time Tracking of Human Eyes Using A Webcam - CodeProjectDeepak JenaОценок пока нет
- A Study of Principal Components Analysis For Mixed DataДокумент6 страницA Study of Principal Components Analysis For Mixed DataMarco Rafael CrespoОценок пока нет
- Linear Algebra (Math1014) Course OutlineДокумент14 страницLinear Algebra (Math1014) Course OutlinencisisthebestОценок пока нет
- MTH108 Courseoutline F2023Документ7 страницMTH108 Courseoutline F2023ahmeddhillon1Оценок пока нет
- Power Series Solutions To The Legendre Equation: Department of Mathematics IIT GuwahatiДокумент15 страницPower Series Solutions To The Legendre Equation: Department of Mathematics IIT Guwahatiferwa shoukatОценок пока нет
- Graphs in Sage MathДокумент874 страницыGraphs in Sage Mathelham100% (1)
- Sakurai - Solutions Manual PDFДокумент112 страницSakurai - Solutions Manual PDFPassion MateОценок пока нет
- VIT CSE BTech Course PlanДокумент76 страницVIT CSE BTech Course PlanApoorv Krishak50% (2)
- BSC (Chem) Final Version Jan05Документ50 страницBSC (Chem) Final Version Jan05Matobola Joel MihaleОценок пока нет
- 18 - Irreducible Tensor Operators and The Wigner-Eckart Theorem PDFДокумент30 страниц18 - Irreducible Tensor Operators and The Wigner-Eckart Theorem PDFUltrazordОценок пока нет
- R22 B.tech CSE 1 1 Sem SyllabusДокумент20 страницR22 B.tech CSE 1 1 Sem SyllabusSai SrivatsaОценок пока нет
- Generalisations of Recursive Sequences Using Diagonalizations of 2 X 2 MatricesДокумент15 страницGeneralisations of Recursive Sequences Using Diagonalizations of 2 X 2 MatricesMelvi Jhuanel LESCANO HUERTOОценок пока нет
- PCAДокумент13 страницPCAAkashBhatОценок пока нет
- A Case Study On Strategic Positioning of Vistara: Analysis and Forecasting Way AheadДокумент11 страницA Case Study On Strategic Positioning of Vistara: Analysis and Forecasting Way AheadShailendra PrajapatiОценок пока нет
- Porphyry AlterationДокумент16 страницPorphyry AlterationJiguur BayasgalanОценок пока нет
- 7th 8th Syll With Objectivesa21.11.09acmДокумент36 страниц7th 8th Syll With Objectivesa21.11.09acmKiran KumarОценок пока нет
- Part - C QuestionsДокумент4 страницыPart - C QuestionsRohith VKОценок пока нет
- MathematicsДокумент5 страницMathematicsHarsha Lodha SethiyaОценок пока нет
- Mat506 Advanced - Mathematics TH 2.10 Ac26Документ2 страницыMat506 Advanced - Mathematics TH 2.10 Ac26Athul KsОценок пока нет
- Communication Systems-Compressed - 0 PDFДокумент77 страницCommunication Systems-Compressed - 0 PDFSujay Hv0% (1)
- Syllabus FE BTech 2018 Solapur UniversityДокумент72 страницыSyllabus FE BTech 2018 Solapur UniversitySarvesh ArbattiОценок пока нет