Вам также может понравиться
- Windship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985От EverandWindship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985C SatchwellОценок пока нет
- Technical CircularsДокумент3 страницыTechnical CircularsAjay SinghОценок пока нет
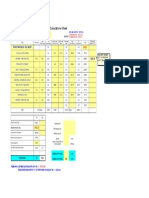
- FREE FORM Bunker Req. Calculation For VOY 67 BLДокумент1 страницаFREE FORM Bunker Req. Calculation For VOY 67 BLNev's Araza100% (1)
- Orb SampleДокумент2 страницыOrb SampleChong Ching ShyanОценок пока нет
- Final Seemp PresentationДокумент16 страницFinal Seemp PresentationLyubomir LazarovОценок пока нет
- Avra Price List 2019-20 PDFДокумент107 страницAvra Price List 2019-20 PDFPrabhu chauhanОценок пока нет
- Ship Info MRV and Seemp and Basic Vessel Info.1Документ4 страницыShip Info MRV and Seemp and Basic Vessel Info.1Sachin SikkaОценок пока нет
- CatalogueДокумент113 страницCatalogueuluckptОценок пока нет
- Where Does NBDP Fit in GMDSS and How To Use ItДокумент14 страницWhere Does NBDP Fit in GMDSS and How To Use ItKunal SinghОценок пока нет
- Rightship PDFДокумент15 страницRightship PDFPrinceSadhotraОценок пока нет
- Why Captain's Cabin Is Always On Starboard SideДокумент2 страницыWhy Captain's Cabin Is Always On Starboard SideKunal SinghОценок пока нет
- STA Article 30jan2013 PDFДокумент11 страницSTA Article 30jan2013 PDFpriyoОценок пока нет
- 欧州の舶用品認証制度に関する調査Документ332 страницы欧州の舶用品認証制度に関する調査Sairy TabОценок пока нет
- Service Report - XXXXXXX River Boat Water Treatment SystemДокумент6 страницService Report - XXXXXXX River Boat Water Treatment SystemmaterozziОценок пока нет
- Ship Energy Efficiency Management Plan (SEEMP)Документ3 страницыShip Energy Efficiency Management Plan (SEEMP)Lagon AinОценок пока нет
- DP Operator Manual: Section 14 Checklists, Standing Orders, and Procedures. DP Operational ProceduresДокумент18 страницDP Operator Manual: Section 14 Checklists, Standing Orders, and Procedures. DP Operational ProceduresKunal SinghОценок пока нет
- Measuring Shaft Power Saves Money On Fuel and Maintenance Datum ElectronicsДокумент13 страницMeasuring Shaft Power Saves Money On Fuel and Maintenance Datum ElectronicsibadurrahmanОценок пока нет
- ECDISДокумент28 страницECDISKunal SinghОценок пока нет
- 30wknm15 Week30 2015Документ119 страниц30wknm15 Week30 2015Kunal Singh100% (1)
- Aux EngineДокумент45 страницAux Enginetheva34Оценок пока нет
- BB Aquarius Folding Fin Stabilisers HRДокумент2 страницыBB Aquarius Folding Fin Stabilisers HRAnthonyОценок пока нет
- Main Engine Layout FamiliarizationДокумент4 страницыMain Engine Layout Familiarizationrajjsmit1989Оценок пока нет
- 2.0 - Design and Development of Steering System of ShipДокумент24 страницы2.0 - Design and Development of Steering System of ShipSandeep MandalОценок пока нет
- Deck RevisedДокумент173 страницыDeck RevisedAnonymous Sfl7su6xОценок пока нет
- Fuel Oil Consumption Data Collection Plan SampleДокумент2 страницыFuel Oil Consumption Data Collection Plan SampleJCAОценок пока нет
- (Mga NVR - Ru) Ces 5.0 Otvety El EngineerДокумент2 страницы(Mga NVR - Ru) Ces 5.0 Otvety El EngineerGeorge DomusciuОценок пока нет
- IBS - IMO SEEMP Part II - Template (Blank Form)Документ10 страницIBS - IMO SEEMP Part II - Template (Blank Form)sakis papasОценок пока нет
- Topten Mantul DP II Teknika 8mbДокумент867 страницTopten Mantul DP II Teknika 8mbPersada tugboatОценок пока нет
- SEEMPДокумент19 страницSEEMPswapneel_kulkarniОценок пока нет
- Product Sheet Asd Tug 2811Документ2 страницыProduct Sheet Asd Tug 2811Nabeel MohammedОценок пока нет
- Letter of Guarantee: Nothing FollowsДокумент1 страницаLetter of Guarantee: Nothing FollowsHarold TiamsonОценок пока нет
- Emergency Report Format 300611Документ3 страницыEmergency Report Format 300611Kunal SinghОценок пока нет
- Conditiion of ClassificationДокумент55 страницConditiion of ClassificationVeeraiah AnbuОценок пока нет
- Shipboard Safety MeetingДокумент2 страницыShipboard Safety MeetingKunal SinghОценок пока нет
- EU MRV Monitoring Plan: Content and Challenges For ShipownersДокумент33 страницыEU MRV Monitoring Plan: Content and Challenges For ShipownersBradley GoldenОценок пока нет
- Seaquest Shipmanagement Engine Manual Engine Instructions: Engine Filing System File No. File NameДокумент1 страницаSeaquest Shipmanagement Engine Manual Engine Instructions: Engine Filing System File No. File NameFilip NikolevskiОценок пока нет
- Voy 038D Callao - TalaraДокумент35 страницVoy 038D Callao - TalaraHendra TambunanОценок пока нет
- Stability-Comparison of Various Codes Etc Rev 0Документ1 страницаStability-Comparison of Various Codes Etc Rev 0Sew Chi ZhongОценок пока нет
- Unit IV MCQДокумент14 страницUnit IV MCQArun PatilОценок пока нет
- 2 Displ TPC & Coef of Forms 2Документ20 страниц2 Displ TPC & Coef of Forms 2Aamir SirohiОценок пока нет
- Pre Purchase Condition Survey Report On M V XINHEДокумент22 страницыPre Purchase Condition Survey Report On M V XINHEMoe LattОценок пока нет
- DSME VLCC CrosstielessДокумент1 страницаDSME VLCC Crosstielesssilidiri100% (1)
- Ship Registration Process - DGДокумент12 страницShip Registration Process - DGRezaОценок пока нет
- EGBДокумент5 страницEGBSwarg VibhaОценок пока нет
- International Navigation Limits (Inl) - WarrantiesДокумент5 страницInternational Navigation Limits (Inl) - WarrantiesKonstantinVallasteОценок пока нет
- The Technical University of Norway: Norwegian Ship Model Experiment TankДокумент56 страницThe Technical University of Norway: Norwegian Ship Model Experiment TankDeepak PooranachandranОценок пока нет
- Resistance of ShipДокумент10 страницResistance of ShipBethadio RizkyОценок пока нет
- Dynamic UKC BookletДокумент19 страницDynamic UKC BookletOllivier AmaruОценок пока нет
- Emergency Stop & Idle Timer System Liebh 9400Документ2 страницыEmergency Stop & Idle Timer System Liebh 9400Nova kurniawan 34Оценок пока нет
- Tekomar Performance Evaluation SWДокумент17 страницTekomar Performance Evaluation SWmaronnamОценок пока нет
- Inventory List Sparepart Me YutakaДокумент4 страницыInventory List Sparepart Me Yutakarandy warouwОценок пока нет
- Unit 3 Ship StructuresДокумент21 страницаUnit 3 Ship StructuresRodrigo LimaОценок пока нет
- Noon Report 55Документ4 страницыNoon Report 55Amar SinghОценок пока нет
- Section 8: Summary of Survey Findings: HullДокумент1 страницаSection 8: Summary of Survey Findings: HullmuhammadОценок пока нет
- Voy. Abstract SampleДокумент11 страницVoy. Abstract SampleAAjay SharmaОценок пока нет
- Anti HeelingДокумент4 страницыAnti HeelingcrerercОценок пока нет
- Rightship GHG Emission RatingДокумент24 страницыRightship GHG Emission RatingBtwins123Оценок пока нет
- Visibility CalculatorДокумент2 страницыVisibility CalculatorJeet SinghОценок пока нет
- BB. Docking Indent (Repair) Pioneer. 13th Feb.20Документ11 страницBB. Docking Indent (Repair) Pioneer. 13th Feb.20Thiet PhamОценок пока нет
- Tanker BulkheadsДокумент7 страницTanker BulkheadsAnil RainaОценок пока нет
- CrestonWood PlannenДокумент42 страницыCrestonWood Plannenyoranvaneekelen100% (1)
- 03 Practical Evaluation of Resistance of High-Speed Catamaran Hull FormsДокумент19 страниц03 Practical Evaluation of Resistance of High-Speed Catamaran Hull FormsKay OosterwegelОценок пока нет
- Wave Restance For High-Speed CatamaransДокумент30 страницWave Restance For High-Speed CatamaransKay OosterwegelОценок пока нет
- Wave Restance For High-Speed CatamaransДокумент30 страницWave Restance For High-Speed CatamaransKay OosterwegelОценок пока нет
- Operation Manual HRP Control System: 360 Degrees Rotating Rudder PropellersДокумент43 страницыOperation Manual HRP Control System: 360 Degrees Rotating Rudder Propellersdaniel60% (5)
- Introduction To Streering Gear SystemДокумент1 страницаIntroduction To Streering Gear SystemNorman prattОценок пока нет
- Landing Gear / Nws Brakes: X F/CTL Altn Law (Prot Lost)Документ1 страницаLanding Gear / Nws Brakes: X F/CTL Altn Law (Prot Lost)Elias IruelaОценок пока нет
- Sinus - Service and Repair ManualДокумент74 страницыSinus - Service and Repair ManualgumepesaОценок пока нет
- UndockingДокумент10 страницUndockingAurelio DutariОценок пока нет
- Walker Bay PartsДокумент5 страницWalker Bay PartsCarlos GamioОценок пока нет
- Maintenance Manual: Courtesy of Bomar Flying Service WWW - Bomar.bizДокумент1 197 страницMaintenance Manual: Courtesy of Bomar Flying Service WWW - Bomar.bizCarlos Marques100% (1)
- 133-590075-0031 - AFCF ManualДокумент28 страниц133-590075-0031 - AFCF ManualHenry GoHe Dexter100% (2)
- TOXOPEUS - Manoeuvring Aspects of Fast Ships With PodsДокумент15 страницTOXOPEUS - Manoeuvring Aspects of Fast Ships With PodstonimakroneОценок пока нет
- 3A15 Rev 96Документ53 страницы3A15 Rev 96CAPIGUTIERREZОценок пока нет
- Piper Service Manual 761-590 PDFДокумент675 страницPiper Service Manual 761-590 PDFjhoneto007Оценок пока нет
- Review Questions and Practice ManeuversДокумент58 страницReview Questions and Practice ManeuversIsabella Valenti100% (1)
- Approximate Method of Calculating Forces On Rudder During Ship Sailing On A Shipping RouteДокумент6 страницApproximate Method of Calculating Forces On Rudder During Ship Sailing On A Shipping RouteKay OosterwegelОценок пока нет
- Aircraft Structures 1Документ100 страницAircraft Structures 1vodmox100% (2)
- P-47D Thunderbolt: 1.20 Cu. In. Displacement 4-StrokeДокумент17 страницP-47D Thunderbolt: 1.20 Cu. In. Displacement 4-Strokejosé delmoteОценок пока нет
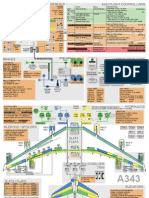
- Instructor Support Airbus A330Документ202 страницыInstructor Support Airbus A330RBipin Raj100% (2)
- Rules For Classification and Construction Ship Technology: Seagoing Ships 14 Redundant Propulsion and Steering SystemsДокумент18 страницRules For Classification and Construction Ship Technology: Seagoing Ships 14 Redundant Propulsion and Steering SystemsLastunОценок пока нет
- AFM-Embraer 170-Emergency and Abnormal Procedures-1385-003-FAA-SECTION04 PDFДокумент140 страницAFM-Embraer 170-Emergency and Abnormal Procedures-1385-003-FAA-SECTION04 PDFitacatjrОценок пока нет
- Air Cadet Publication: FlightДокумент62 страницыAir Cadet Publication: FlightMarcus Drago100% (1)
- Colomban MC-30 Luciole G-CIBJ 11-19 InvestigationДокумент4 страницыColomban MC-30 Luciole G-CIBJ 11-19 InvestigationHua Hidari YangОценок пока нет
- Fokker DR1 Plans (Assembly Drawing)Документ2 страницыFokker DR1 Plans (Assembly Drawing)mam73Оценок пока нет
- PlaningДокумент21 страницаPlaningAmalia CatalinaОценок пока нет
- Airplane Control SurfacesДокумент3 страницыAirplane Control SurfacesAndroid OneОценок пока нет
- Ship Steering GearДокумент8 страницShip Steering Gear123habib123fikri67% (3)
- Foiling C-Class CatamaranДокумент8 страницFoiling C-Class CatamaranMustafa Umut SaracОценок пока нет
- Boeing 767 300 Landing GearДокумент15 страницBoeing 767 300 Landing GearWorawat Wongratanamajcha100% (2)
- Flight ControlДокумент35 страницFlight ControlabuzarshazliОценок пока нет
- 15 - The Dangers of Bank SuctionДокумент2 страницы15 - The Dangers of Bank SuctionEdi UnusicОценок пока нет
- Service Manual Cherokee Warrior (Part Number 761-539)Документ716 страницService Manual Cherokee Warrior (Part Number 761-539)Bianco YepОценок пока нет
- Turbine Pilot: Used Turbine Review: The Merlin IiisДокумент24 страницыTurbine Pilot: Used Turbine Review: The Merlin IiisJose LaraОценок пока нет
- AP Biology Premium, 2024: Comprehensive Review With 5 Practice Tests + an Online Timed Test OptionОт EverandAP Biology Premium, 2024: Comprehensive Review With 5 Practice Tests + an Online Timed Test OptionОценок пока нет
- AP Physics 2 Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeОт EverandAP Physics 2 Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeОценок пока нет
- GMAT Prep 2024/2025 For Dummies with Online Practice (GMAT Focus Edition)От EverandGMAT Prep 2024/2025 For Dummies with Online Practice (GMAT Focus Edition)Оценок пока нет
- How to Be a High School Superstar: A Revolutionary Plan to Get into College by Standing Out (Without Burning Out)От EverandHow to Be a High School Superstar: A Revolutionary Plan to Get into College by Standing Out (Without Burning Out)Рейтинг: 4.5 из 5 звезд4.5/5 (11)
- AP English Language and Composition Premium, 2024: 8 Practice Tests + Comprehensive Review + Online PracticeОт EverandAP English Language and Composition Premium, 2024: 8 Practice Tests + Comprehensive Review + Online PracticeОценок пока нет
- AP Physics 1 Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeОт EverandAP Physics 1 Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeОценок пока нет
- GMAT Foundations of Verbal: Practice Problems in Book and OnlineОт EverandGMAT Foundations of Verbal: Practice Problems in Book and OnlineОценок пока нет
- AP Microeconomics/Macroeconomics Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeОт EverandAP Microeconomics/Macroeconomics Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeОценок пока нет
- LSAT For Dummies (with Free Online Practice Tests)От EverandLSAT For Dummies (with Free Online Practice Tests)Рейтинг: 4 из 5 звезд4/5 (1)
- AP World History: Modern Premium, 2024: Comprehensive Review with 5 Practice Tests + an Online Timed Test OptionОт EverandAP World History: Modern Premium, 2024: Comprehensive Review with 5 Practice Tests + an Online Timed Test OptionРейтинг: 5 из 5 звезд5/5 (1)
- AP Human Geography Premium, 2024: 6 Practice Tests + Comprehensive Review + Online PracticeОт EverandAP Human Geography Premium, 2024: 6 Practice Tests + Comprehensive Review + Online PracticeОценок пока нет
- Medical English Dialogues: Clear & Simple Medical English Vocabulary for ESL/EFL LearnersОт EverandMedical English Dialogues: Clear & Simple Medical English Vocabulary for ESL/EFL LearnersОценок пока нет
- AP Chemistry Flashcards, Fourth Edition: Up-to-Date Review and PracticeОт EverandAP Chemistry Flashcards, Fourth Edition: Up-to-Date Review and PracticeОценок пока нет
- 55 Successful Harvard Law School Application Essays, 2nd Edition: With Analysis by the Staff of The Harvard CrimsonОт Everand55 Successful Harvard Law School Application Essays, 2nd Edition: With Analysis by the Staff of The Harvard CrimsonРейтинг: 3 из 5 звезд3/5 (1)
- Digital SAT Prep 2024 For Dummies: Book + 4 Practice Tests Online, Updated for the NEW Digital FormatОт EverandDigital SAT Prep 2024 For Dummies: Book + 4 Practice Tests Online, Updated for the NEW Digital FormatОценок пока нет
- Digital SAT Reading and Writing Practice Questions: Test Prep SeriesОт EverandDigital SAT Reading and Writing Practice Questions: Test Prep SeriesРейтинг: 5 из 5 звезд5/5 (2)
- College Level Anatomy and Physiology: Essential Knowledge for Healthcare Students, Professionals, and Caregivers Preparing for Nursing Exams, Board Certifications, and BeyondОт EverandCollege Level Anatomy and Physiology: Essential Knowledge for Healthcare Students, Professionals, and Caregivers Preparing for Nursing Exams, Board Certifications, and BeyondОценок пока нет
- College Level Anatomy and Physiology: Essential Knowledge for Healthcare Students, Professionals, and Caregivers Preparing for Nursing Exams, Board Certifications, and Beyond Angela GloverОт EverandCollege Level Anatomy and Physiology: Essential Knowledge for Healthcare Students, Professionals, and Caregivers Preparing for Nursing Exams, Board Certifications, and Beyond Angela GloverОценок пока нет
- The Premed Playbook: Guide to the Medical School Personal StatementОт EverandThe Premed Playbook: Guide to the Medical School Personal StatementРейтинг: 5 из 5 звезд5/5 (1)
- IELTS Academic Vocabulary Builder: Improve Your Band Score on the IELTS Academic ExamОт EverandIELTS Academic Vocabulary Builder: Improve Your Band Score on the IELTS Academic ExamОценок пока нет
- AP U.S. History Premium, 2024: Comprehensive Review With 5 Practice Tests + an Online Timed Test OptionОт EverandAP U.S. History Premium, 2024: Comprehensive Review With 5 Practice Tests + an Online Timed Test OptionОценок пока нет
- AP Environmental Science Premium, 2024: 5 Practice Tests + Comprehensive Review + Online PracticeОт EverandAP Environmental Science Premium, 2024: 5 Practice Tests + Comprehensive Review + Online PracticeОценок пока нет
- Digital PSAT/NMSQT Study Guide Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeОт EverandDigital PSAT/NMSQT Study Guide Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeОценок пока нет
- SAT Prep Plus: Unlocked Edition 2022 - 5 Full Length Practice Tests - Behind-the-scenes game-changing answer explanations to each question - Top level strategies, tips and tricks for each sectionОт EverandSAT Prep Plus: Unlocked Edition 2022 - 5 Full Length Practice Tests - Behind-the-scenes game-changing answer explanations to each question - Top level strategies, tips and tricks for each sectionОценок пока нет
- Indian Polity with Indian Constitution & Parliamentary AffairsОт EverandIndian Polity with Indian Constitution & Parliamentary AffairsОценок пока нет
- English Grammar Exercises With Answers Part 5: Your Quest Towards C2От EverandEnglish Grammar Exercises With Answers Part 5: Your Quest Towards C2Оценок пока нет
- 50 Successful Harvard Application Essays, 5th Edition: What Worked for Them Can Help You Get into the College of Your ChoiceОт Everand50 Successful Harvard Application Essays, 5th Edition: What Worked for Them Can Help You Get into the College of Your ChoiceРейтинг: 5 из 5 звезд5/5 (4)