Вам также может понравиться
- Common Rail Engine Diagnostic/Repair Kit: Tier Ii CompliantДокумент14 страницCommon Rail Engine Diagnostic/Repair Kit: Tier Ii CompliantYamil AguilarОценок пока нет
- Spi ModuleДокумент13 страницSpi ModuleMuhammadSaeedTahir100% (2)
- Gree-44814 09K 12K (LCLH)Документ87 страницGree-44814 09K 12K (LCLH)MatyoJОценок пока нет
- ARM Cortex M3 RegistersДокумент22 страницыARM Cortex M3 RegistersRaveendra Moodithaya100% (2)
- "Sound Innovation, On Call": EMS5 Call Director Easy Set-Up InstructionsДокумент19 страниц"Sound Innovation, On Call": EMS5 Call Director Easy Set-Up Instructionswayne mcmurrayОценок пока нет
- Frequently Asked Questions - AVRДокумент18 страницFrequently Asked Questions - AVRSagar Gupta100% (2)
- In-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFДокумент14 страницIn-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFMauro Vargas100% (2)
- 9-Serial Comm (Autosaved)Документ48 страниц9-Serial Comm (Autosaved)M ADNAN Z100% (1)
- Bit TwiddlingДокумент90 страницBit TwiddlingKritika Agrawal100% (1)
- Interfacing LCD To Arduino Display Text and Characters On LCD Screen Using ArduinoДокумент9 страницInterfacing LCD To Arduino Display Text and Characters On LCD Screen Using ArduinoThomaselva100% (1)
- Catalog CДокумент281 страницаCatalog CVas Steel100% (1)
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishДокумент29 страницAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
- Understanding I2C BusДокумент8 страницUnderstanding I2C BusMai Khoa100% (1)
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishДокумент18 страницAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (1)
- File: /home/ashish/desktop/lcd/lcdlibv20/lcd.c Page 1 of 6: "LCD.H"Документ6 страницFile: /home/ashish/desktop/lcd/lcdlibv20/lcd.c Page 1 of 6: "LCD.H"letter_ashish4444100% (1)
- Assembly For BegginersДокумент68 страницAssembly For BegginersGorciu Cristina100% (1)
- 41200cmanual MacrochipДокумент36 страниц41200cmanual MacrochipDarilho Batista Ignacio100% (1)
- LED Moving Message Diaply Using PIC16f628 CD4017 and 74LS595Документ5 страницLED Moving Message Diaply Using PIC16f628 CD4017 and 74LS595murugaraj19822100% (1)
- Sel ProdДокумент70 страницSel Prodnad2702100% (1)
- Tshoot EthernetДокумент11 страницTshoot Ethernetmrigank shekhar100% (1)
- Practical Neural Networks (3) : Part 3 - Feedback Nets and Competitive NetsДокумент5 страницPractical Neural Networks (3) : Part 3 - Feedback Nets and Competitive NetsTariq Zuhluf100% (2)
- ElectronicsForYou201303 - RF RobotДокумент3 страницыElectronicsForYou201303 - RF RobotAnonymous JoB5Zxg100% (1)
- C Compilation ProcessДокумент9 страницC Compilation ProcessSourav Ba Ronnie100% (1)
- Brushless DC Electric Motor Control by CPLDДокумент6 страницBrushless DC Electric Motor Control by CPLDIonela100% (3)
- Serial Communications in Win32Документ46 страницSerial Communications in Win32api-3738664100% (3)
- Binary OperatorsДокумент10 страницBinary OperatorsDusko Koscica100% (1)
- TOP269 An47 PDFДокумент30 страницTOP269 An47 PDFajoaomv100% (1)
- MathLibrary PDFДокумент16 страницMathLibrary PDFxyz the100% (1)
- DMA Controller (DMAC) : - Data transfer between the μP's main memory & an externalДокумент6 страницDMA Controller (DMAC) : - Data transfer between the μP's main memory & an externalharinik7100% (1)
- Bit WiseДокумент24 страницыBit WiseSrijit Bose100% (1)
- Day 3 PM Serial ComДокумент16 страницDay 3 PM Serial ComBien Morfe100% (1)
- Uart Ip Core Specification: Systemverilog VersionДокумент20 страницUart Ip Core Specification: Systemverilog VersionSujay M100% (1)
- Power Xtal MCU: Mosi SCK Miso SD - CsДокумент1 страницаPower Xtal MCU: Mosi SCK Miso SD - Csspot100% (2)
- 6.3 LCD and KeypadДокумент22 страницы6.3 LCD and KeypadZahier Asyraf100% (2)
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishДокумент28 страницAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
- Capacitor Meter AutoRanging OLED 128x32 KTW Updated Code 05feb2021Документ2 страницыCapacitor Meter AutoRanging OLED 128x32 KTW Updated Code 05feb20214NM20EE085 VISHWAKEERTHI BHAT M100% (1)
- MicrocontrollersДокумент14 страницMicrocontrollersanshu4u06100% (1)
- Easypic v7 Manual v104cДокумент38 страницEasypic v7 Manual v104cjuan0537100% (1)
- ENEL3CA/DA: Electronic/Computer Design 1: PCB Philosophy and Design Using UltiboardДокумент43 страницыENEL3CA/DA: Electronic/Computer Design 1: PCB Philosophy and Design Using Ultiboardbknaruma100% (1)
- Schematic Diagrams: Special NoteДокумент12 страницSchematic Diagrams: Special NoteAlexandre S. Corrêa100% (1)
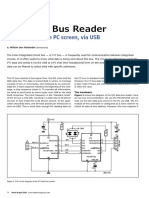
- Lector de Bus de Datos IÂ CДокумент4 страницыLector de Bus de Datos IÂ CGiancarloRichardRivadeneyraMiranda100% (1)
- TNY264PNДокумент6 страницTNY264PNJose Benavides100% (1)
- Connecting LANs, Backbone Networks, and Virtual LANs - MCQsДокумент8 страницConnecting LANs, Backbone Networks, and Virtual LANs - MCQsSachin Wani100% (1)
- UART Wishbone SpecДокумент20 страницUART Wishbone SpecSandeep Thakur100% (1)
- Assembly TutorialДокумент66 страницAssembly TutorialDarmawan Adiputra100% (2)
- Sim8900-Evb V1.03 DL (160324)Документ8 страницSim8900-Evb V1.03 DL (160324)Bhagath Ch100% (1)
- Quick StartДокумент19 страницQuick StartPeloOz Alcantara Ramirez100% (1)
- Unit 5 FunctionsДокумент26 страницUnit 5 Functionsshubhangi100% (1)
- E 01 CH 02Документ2 страницыE 01 CH 02Tariq Zuhluf100% (1)
- Slave Mains On-Off Control: Amplificationj Attenuation SelectorДокумент3 страницыSlave Mains On-Off Control: Amplificationj Attenuation SelectorTariq Zuhluf100% (2)
- Humidity Indicator and Controller: Test PointsДокумент2 страницыHumidity Indicator and Controller: Test PointsAnonymous JoB5Zxg100% (1)
- Stepper Motor: Free !Документ2 страницыStepper Motor: Free !carlos augusto do carmo braia100% (1)
- 16x2 Basic LCD Driver Files XC8Документ3 страницы16x2 Basic LCD Driver Files XC8asmedmiranda100% (1)
- Lab LCDДокумент6 страницLab LCDJesus Cotrina100% (1)
- Schematic PrintsДокумент2 страницыSchematic PrintsYusuf Güngör100% (1)
- Inter Integrated Circuit Bus Protocol (I C) : By: Prof. Mitesh LimachiaДокумент53 страницыInter Integrated Circuit Bus Protocol (I C) : By: Prof. Mitesh LimachiaFarman Rizvi100% (2)
- Static Metrics For CДокумент3 страницыStatic Metrics For Cabhishek100% (1)
- Thermostat PCBДокумент5 страницThermostat PCBalin33100% (1)
- The Basics of Ethernet The Basics of Ethernet The Basics of Ethernet The Basics of EthernetДокумент6 страницThe Basics of Ethernet The Basics of Ethernet The Basics of Ethernet The Basics of EthernetRupesh Kumar100% (1)
- Ladder Logic For PIC and AVRДокумент9 страницLadder Logic For PIC and AVRCarlos Cesar MaiaОценок пока нет
- LDmicro - Manual InglesДокумент17 страницLDmicro - Manual InglesMoacyr_Jr0% (1)
- Mcus How Do They WorkДокумент21 страницаMcus How Do They WorkhoudaОценок пока нет
- C For PICДокумент9 страницC For PICsaudОценок пока нет
- 1339fas-1271399 lt1339cswДокумент21 страница1339fas-1271399 lt1339cswMuhammad ShamrezОценок пока нет
- Laboratory 7Документ4 страницыLaboratory 7Priyamdas123Оценок пока нет
- Kahlenberg M-512 Fog HornДокумент2 страницыKahlenberg M-512 Fog HorntariktunadОценок пока нет
- AVT - Air Velocity TransmitterДокумент4 страницыAVT - Air Velocity Transmitternik amirulОценок пока нет
- 55:041 Electronic Circuits: Sections of Chapter 3 &4Документ97 страниц55:041 Electronic Circuits: Sections of Chapter 3 &4Daniel GarzonОценок пока нет
- Resimold Resiglas CRT DryType CommercialBrochure enДокумент12 страницResimold Resiglas CRT DryType CommercialBrochure engreyllom9791Оценок пока нет
- CA 05800007 eДокумент53 страницыCA 05800007 eLD Jr FrancisОценок пока нет
- The Learner Demonstrates Understanding of Media and Information Literacy (MIL) and MIL Related ConceptsДокумент4 страницыThe Learner Demonstrates Understanding of Media and Information Literacy (MIL) and MIL Related ConceptsJules MarcoОценок пока нет
- Aftron - Split AC Unit SpecДокумент2 страницыAftron - Split AC Unit Specjhay rarezaОценок пока нет
- Rancang Bangun Prototipe Sistem Kendali Iron Removal Filter (Irf) Pada Unit Pengolahan Air Bersih Berbasis PLCДокумент8 страницRancang Bangun Prototipe Sistem Kendali Iron Removal Filter (Irf) Pada Unit Pengolahan Air Bersih Berbasis PLCaulyaakmala24Оценок пока нет
- 6204 Parts Lists PDFДокумент51 страница6204 Parts Lists PDFMirzaОценок пока нет
- Dielectric SpectrosДокумент6 страницDielectric SpectrosAloke RajkishoreОценок пока нет
- 96722599-B68L-54 Quick Start - (V100R001 01, En, SI, L)Документ20 страниц96722599-B68L-54 Quick Start - (V100R001 01, En, SI, L)Marco Alejandro Flores BarrazaОценок пока нет
- D3 DebugДокумент17 страницD3 DebugJamesss BlackОценок пока нет
- UCPДокумент0 страницUCPcontact_egypt2Оценок пока нет
- Difference Between A Latch and A Flip Flop PDFДокумент2 страницыDifference Between A Latch and A Flip Flop PDFVenkatGollaОценок пока нет
- MC33186DH1Документ12 страницMC33186DH1Anonymous EM9pjo0eeОценок пока нет
- 3D Holographic Projection TechniqueДокумент26 страниц3D Holographic Projection TechniqueGagan Shrivastava0% (1)
- Memory Interfaces Made Easy With Xilinx Fpgas and The Memory Interface GeneratorДокумент16 страницMemory Interfaces Made Easy With Xilinx Fpgas and The Memory Interface GeneratorRamya NedumbalaОценок пока нет
- Lecture 4 2022 FinalДокумент39 страницLecture 4 2022 FinalKenedy GreysonОценок пока нет
- Edc Lab Manuals Third SemesterДокумент56 страницEdc Lab Manuals Third SemesterSprout GigsОценок пока нет
- Dell Inspiron 15 5575 Compal CAL51 LA F121P Rev 1 00A00 PDFДокумент61 страницаDell Inspiron 15 5575 Compal CAL51 LA F121P Rev 1 00A00 PDFDeMzo SMpОценок пока нет
- Three Improvements To The Reduceron: Matthew Naylor and Colin Runciman University of YorkДокумент50 страницThree Improvements To The Reduceron: Matthew Naylor and Colin Runciman University of YorkaldeghaidyОценок пока нет
- Bengkel Perkongsian Teknik Menjawab Kertas 3 SPM SMKRDДокумент17 страницBengkel Perkongsian Teknik Menjawab Kertas 3 SPM SMKRDMThana BalanОценок пока нет
- HCPL-7800A: Isolation AmplifierДокумент9 страницHCPL-7800A: Isolation AmplifierkarkonОценок пока нет
- Ignition Systems For Gasoline EnginesДокумент27 страницIgnition Systems For Gasoline Enginesanon_53273932Оценок пока нет