Вам также может понравиться
- Muros de Contención en Voladizo Con SismoДокумент8 страницMuros de Contención en Voladizo Con SismoCesarОценок пока нет
- Columnas EsbeltasДокумент10 страницColumnas EsbeltasJob AguilarОценок пока нет
- Cuarta Pract 2020-1 Tipo CДокумент5 страницCuarta Pract 2020-1 Tipo CGerar Hideto ShidoОценок пока нет
- Muro de Contencion, en Base McCormac Teoria Plástica OkДокумент15 страницMuro de Contencion, en Base McCormac Teoria Plástica OkIván Gámez CanoОценок пока нет
- Trabajo Final CimentacionesДокумент40 страницTrabajo Final CimentacionesDiego Armando Medina Herrera100% (1)
- Muros de Contención, NotasДокумент11 страницMuros de Contención, NotasFaberОценок пока нет
- TPNº5 - PilotesДокумент22 страницыTPNº5 - PilotesGuadalupe ChavezОценок пока нет
- Cargas Vivas Sobre AlcantarillasДокумент13 страницCargas Vivas Sobre AlcantarillasJavierОценок пока нет
- Anexo 3 Capacidad de Carga y Asentamientos PilotesДокумент33 страницыAnexo 3 Capacidad de Carga y Asentamientos Pilotesrodrigogomez87Оценок пока нет
- Durabilidad Del ConcretoДокумент50 страницDurabilidad Del ConcretoAnonimoОценок пока нет
- 1.) Diseño de Puentes Cargas en Puentes PDFДокумент60 страниц1.) Diseño de Puentes Cargas en Puentes PDFNICOLAS RODRIGUEZ ROMEROОценок пока нет
- Zapata AisladaДокумент3 страницыZapata AisladaVICTOR LEONARDO RAMIREZ GUERREROОценок пока нет
- Ejemplo Diseño A CorteДокумент8 страницEjemplo Diseño A Cortedennys perezОценок пока нет
- Apuntes Cálculo de Zapatas - UCLMДокумент36 страницApuntes Cálculo de Zapatas - UCLMingenierosdemontesclmОценок пока нет
- Calculo Capacidad de Carga Cimentaciones Superficiales (1) 0000Документ485 страницCalculo Capacidad de Carga Cimentaciones Superficiales (1) 0000jorgebahena14Оценок пока нет
- Placas Base para Columnas Cargadas ConcéntricamenteДокумент12 страницPlacas Base para Columnas Cargadas ConcéntricamenteSOTO FLORES LUIS AYRTON100% (1)
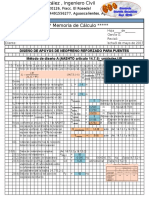
- Diseno de Apoyos de Neopreno Metodo A AASHTO LRFD Ed1998Документ66 страницDiseno de Apoyos de Neopreno Metodo A AASHTO LRFD Ed1998Sneyder Ney100% (2)
- Cimentaciones ProfundasДокумент55 страницCimentaciones ProfundasGian Franco Ruiz TorresОценок пока нет
- AashtoДокумент78 страницAashtochabaloonОценок пока нет
- Zapatas AisladasДокумент24 страницыZapatas AisladasJosue Rdz PamplonaОценок пока нет
- Marco Teórico - ReservorioДокумент49 страницMarco Teórico - ReservorioGarygodier100% (1)
- Exposicion de PuentesДокумент27 страницExposicion de PuentesKathyZavaletaОценок пока нет
- I Unidad Empuje de SuelosДокумент43 страницыI Unidad Empuje de SuelosRamfort Linares CancinoОценок пока нет
- Foro de DiscusiónДокумент3 страницыForo de DiscusiónPabloОценок пока нет
- 04 Zapatas CombinadasДокумент11 страниц04 Zapatas CombinadasNathaly GonzalesОценок пока нет
- 15.ovando Meza Luis Fernando CorregidoДокумент30 страниц15.ovando Meza Luis Fernando CorregidoRichard CCОценок пока нет
- Sesión 12 - Capacidad de Carga Del SueloДокумент53 страницыSesión 12 - Capacidad de Carga Del SueloCiiroRiimskyОценок пока нет
- Capacidad de CargaДокумент20 страницCapacidad de Cargajaneth gantu loarteОценок пока нет
- Cimentaciones Con PilotesДокумент22 страницыCimentaciones Con PilotesNicolai Torres AnguloОценок пока нет
- Cálculo de Capacidad de Carga Última Según TerzaghiДокумент3 страницыCálculo de Capacidad de Carga Última Según Terzaghimirella GCОценок пока нет
- TERZAGUIДокумент25 страницTERZAGUIMIGUEL ANGEL RODRIGUEZ SANCHEZОценок пока нет
- INFORME Cert. Nro 19 PDFДокумент30 страницINFORME Cert. Nro 19 PDFalvinОценок пока нет
- ACCION DE CUMPLIMIENTO. ActualizadoДокумент5 страницACCION DE CUMPLIMIENTO. ActualizadoMadeleem victoria Vargas TorrezОценок пока нет
- Cap.5 Muros de ContencionДокумент29 страницCap.5 Muros de ContencionJhoel helder Calle hilariОценок пока нет
- Mecanica de Suelos - Estabilidad de Taludes - Cuaderno de Trabajo GuiaДокумент13 страницMecanica de Suelos - Estabilidad de Taludes - Cuaderno de Trabajo GuiagreenstopaОценок пока нет
- 3er y 4 To Tramo de Diseño de Escalera Con MathcadprimeДокумент9 страниц3er y 4 To Tramo de Diseño de Escalera Con MathcadprimeFrancisco Diaz QuezadaОценок пока нет
- Diseño EstructuralДокумент48 страницDiseño EstructuralMabel Cangahuala UríaОценок пока нет
- Carga Ultima Según E031Документ3 страницыCarga Ultima Según E031NABUCODONOSOR TobiasОценок пока нет
- Método de Boussinesq (Cálculo de Incremento de Esfuerzos)Документ11 страницMétodo de Boussinesq (Cálculo de Incremento de Esfuerzos)Alira MendezОценок пока нет
- Coeficiente de BalastoДокумент12 страницCoeficiente de BalastoRichard Chavez GamarraОценок пока нет
- Muros de ContecionДокумент9 страницMuros de ContecionhectorОценок пока нет
- EmpujeДокумент27 страницEmpujeNilton Cordova MachucaОценок пока нет
- Concreto Armado (Diseño A Corte)Документ26 страницConcreto Armado (Diseño A Corte)José Luis Zambrano OjedaОценок пока нет
- Ejercicio CabezalДокумент9 страницEjercicio CabezalFernando Salvatierra RosasОценок пока нет
- CLASE3Документ5 страницCLASE3Rafael CordovaОценок пока нет
- Columnas EsbeltasДокумент10 страницColumnas EsbeltasErick TorresОценок пока нет
- Diseño Zapatas Aisladas LateralesДокумент62 страницыDiseño Zapatas Aisladas LateralesPhlucker Acaro RudyОценок пока нет
- Espesores y Cargas de LosasДокумент8 страницEspesores y Cargas de LosasKatherine Hernández MaríaОценок пока нет
- Estabilidad Interna de MuroДокумент2 страницыEstabilidad Interna de MuroLuis Gustavo La Rosa100% (1)
- Cimentación CorridaДокумент23 страницыCimentación CorridaLuis Bocanegra AlfaroОценок пока нет
- Ejemplo de Viga CompuestaДокумент5 страницEjemplo de Viga CompuestaHector Rangel Rios HernandezОценок пока нет
- UPC Muro Contencion 2 EmpujeДокумент77 страницUPC Muro Contencion 2 EmpujeGianella Farias100% (1)
- Clase 5 Calculo de Asentamientos ZapatasДокумент23 страницыClase 5 Calculo de Asentamientos ZapatasCarlos Andres Fragozo AraujoОценок пока нет
- Método Mononobe - OkabeДокумент7 страницMétodo Mononobe - OkabeMario González100% (4)
- Metodo Mononobe OkabeДокумент6 страницMetodo Mononobe OkabeKaren CarvajalОценок пока нет
- Metodo Mononobe OkabeДокумент6 страницMetodo Mononobe OkabeKharen Hernández CarvajalОценок пока нет
- Mononobe OkabeДокумент5 страницMononobe OkabeDiana VazquezОценок пока нет
- Mononobe OkabeДокумент4 страницыMononobe OkabeRené Mella CidОценок пока нет
- Revit Clase 1 24.02.20Документ19 страницRevit Clase 1 24.02.20Jose Carlos0% (2)
- EmpowermentДокумент25 страницEmpowermentJose CarlosОценок пока нет
- 059 Estudio Suelos Actualizado PDFДокумент65 страниц059 Estudio Suelos Actualizado PDFJose CarlosОценок пока нет
- Memoria de Cálculo - Perez GanboaДокумент73 страницыMemoria de Cálculo - Perez GanboaJose CarlosОценок пока нет
- Cap. 10-Gestión de Las Comunicaciones Del ProyectoДокумент26 страницCap. 10-Gestión de Las Comunicaciones Del ProyectoJose CarlosОценок пока нет
- Lectura Las PiedrasДокумент3 страницыLectura Las PiedrasJose CarlosОценок пока нет
- Lectura Los PerritosДокумент3 страницыLectura Los PerritosJose CarlosОценок пока нет
- Ejercicios de TrigonometriaДокумент8 страницEjercicios de TrigonometriaJose CarlosОценок пока нет
- Martes y Miercoles SantoДокумент2 страницыMartes y Miercoles SantoJose CarlosОценок пока нет
- Capítulo II TrabajoДокумент6 страницCapítulo II TrabajoJose CarlosОценок пока нет
- Memoria DescriptivaДокумент20 страницMemoria DescriptivaJose Carlos100% (1)
- Tesis Maestria Carlos GuerraДокумент19 страницTesis Maestria Carlos GuerraJose CarlosОценок пока нет
- Memoria Descriptiva Mejoramiento Coliseo Municipal Jose PainДокумент7 страницMemoria Descriptiva Mejoramiento Coliseo Municipal Jose PainJose CarlosОценок пока нет
- Memoria de Calculo Estructural Vivienda UnifamiliarДокумент41 страницаMemoria de Calculo Estructural Vivienda UnifamiliarJose Carlos75% (4)
- Prácticas de Fisica GastroДокумент9 страницPrácticas de Fisica GastroLisbeth HernandezОценок пока нет
- Principios Del Flujo de TuberíasДокумент5 страницPrincipios Del Flujo de Tuberíassaul vilcas huamanОценок пока нет
- Monografia Refrigeracion en CascadaДокумент26 страницMonografia Refrigeracion en CascadaPatiitOwh FernandezОценок пока нет
- 05 MEF-2021 22-VigasДокумент66 страниц05 MEF-2021 22-VigasmauricioОценок пока нет
- Seleccion de Bombas para RiegoДокумент16 страницSeleccion de Bombas para RiegoAlan SalasОценок пока нет
- Informe Compresores - ReparadoДокумент20 страницInforme Compresores - ReparadoCarmen de LeonОценок пока нет
- Zonas UTM en PerúДокумент6 страницZonas UTM en PerúTatiana PachasОценок пока нет
- Teorema de Stokes FinalДокумент10 страницTeorema de Stokes FinalRekii YumuraОценок пока нет
- Calculo JimmyДокумент7 страницCalculo JimmyjimmyОценок пока нет
- Diseño de La InterconexionДокумент3 страницыDiseño de La InterconexionmiguelОценок пока нет
- HeladasДокумент11 страницHeladasCarolina Peralta ParradoОценок пока нет
- Miguel Vidal BelloДокумент56 страницMiguel Vidal BelloJuan Pablo Rodriguez ShmitterОценок пока нет
- Tipos de MeteorizaciónДокумент5 страницTipos de MeteorizaciónAlfredo CerdaОценок пока нет
- 1º ESO G&H Tema 4 (Resumen) - Algaida AДокумент8 страниц1º ESO G&H Tema 4 (Resumen) - Algaida AMinervaОценок пока нет
- Tipos de CristalizadoresДокумент18 страницTipos de CristalizadoresEduardo Daniel Diaz50% (2)
- Balance Macroscópico de Energía. Calentamiento de Un Tanque Agitado (Final)Документ21 страницаBalance Macroscópico de Energía. Calentamiento de Un Tanque Agitado (Final)J Alexander Ortiz DuqueОценок пока нет
- Membrana CelularДокумент42 страницыMembrana CelularJorge Alexander Clavijo SandobalОценок пока нет
- Laboratorio 1 RHYSMIR PANTOJA SALGADOДокумент19 страницLaboratorio 1 RHYSMIR PANTOJA SALGADORhysmir PantojaОценок пока нет
- 2017 Estudio de Un Sistema de Refrigeración Por Compresión de Vapor Aplicado A La Industria AgroalimentariaДокумент93 страницы2017 Estudio de Un Sistema de Refrigeración Por Compresión de Vapor Aplicado A La Industria AgroalimentariaCésar Alcántara InfanteОценок пока нет
- Practica 1Документ4 страницыPractica 1Aldo ArgudinОценок пока нет
- La Luz y Sus FenomenosДокумент2 страницыLa Luz y Sus FenomenosChristian Arela100% (1)
- Segundo Parcial Clima 23Документ3 страницыSegundo Parcial Clima 23Dahiana Sarai LopezОценок пока нет
- Cálculo de La Carga de Enfriamiento 2Документ57 страницCálculo de La Carga de Enfriamiento 2Robert Velásquez ZárateОценок пока нет
- Camaras Frigorificas y EquiposДокумент35 страницCamaras Frigorificas y EquiposRonald Nuñez Castillo0% (1)
- Todas Las Protesis TeoriaДокумент43 страницыTodas Las Protesis TeoriaMike Bison75% (4)
- Estructuras Materiales 1Документ31 страницаEstructuras Materiales 1Roberto PortilloОценок пока нет
- Informe: Los Rayos XДокумент5 страницInforme: Los Rayos XGabriel LeonОценок пока нет
- Hoja Tecnica Agente Limpio HFC-227Документ2 страницыHoja Tecnica Agente Limpio HFC-227junioralamo17Оценок пока нет
- Facultad de Medicina y Ciencias de La SaludДокумент8 страницFacultad de Medicina y Ciencias de La SaludCurtis ReedОценок пока нет
- Ficha de Radiacion SolarДокумент4 страницыFicha de Radiacion SolarDafne Chanthall Gonzales AlvaradoОценок пока нет