Вам также может понравиться
- Tarot 2-Axis Brushless Gimbal For Gopro User Manual V1.0: Connections InstructionsДокумент8 страницTarot 2-Axis Brushless Gimbal For Gopro User Manual V1.0: Connections InstructionsonurdasОценок пока нет
- Multiwii Software GUIDEДокумент10 страницMultiwii Software GUIDEHiroshi TakeshiОценок пока нет
- Game Boy Advance Architecture: Architecture of Consoles: A Practical Analysis, #7От EverandGame Boy Advance Architecture: Architecture of Consoles: A Practical Analysis, #7Оценок пока нет
- Copterlab - Alexmos Brushless Gimbal Documentation SimpleBGC EN PDFДокумент18 страницCopterlab - Alexmos Brushless Gimbal Documentation SimpleBGC EN PDFfull gas tvОценок пока нет
- Wii Architecture: Architecture of Consoles: A Practical Analysis, #11От EverandWii Architecture: Architecture of Consoles: A Practical Analysis, #11Оценок пока нет
- HGLRC F428-TX20 V2-ManualДокумент15 страницHGLRC F428-TX20 V2-ManualWilson CarreiraОценок пока нет
- Joint Photographic Experts Group: Unlocking the Power of Visual Data with the JPEG StandardОт EverandJoint Photographic Experts Group: Unlocking the Power of Visual Data with the JPEG StandardОценок пока нет
- Newbies Guide To CRIUS MultiWii SE Board and SoftwareДокумент10 страницNewbies Guide To CRIUS MultiWii SE Board and SoftwareTatimaxОценок пока нет
- HGLRC F4 V5PRO ManualДокумент12 страницHGLRC F4 V5PRO ManualGobardhan Pudasaini100% (1)
- CNC Usb Controller MK 3Документ20 страницCNC Usb Controller MK 3Antonio Jiménez100% (1)
- Crius All in One Pro V1.3docxДокумент9 страницCrius All in One Pro V1.3docxAdrian TudorОценок пока нет
- CNC Usb Controller MK 3Документ36 страницCNC Usb Controller MK 3Keadaan BisaОценок пока нет
- OpenGD77 User Guide2Документ33 страницыOpenGD77 User Guide2Cosmyn ZahariaОценок пока нет
- H8C M eДокумент262 страницыH8C M es_barriosОценок пока нет
- GVIF Rev.6 English0118Документ25 страницGVIF Rev.6 English0118Saro HerreraОценок пока нет
- MWC Flight Control A: Ssembly and Debugging InstructionsДокумент33 страницыMWC Flight Control A: Ssembly and Debugging InstructionsValentin GeorgeОценок пока нет
- FPVFreerider Manual PDFДокумент13 страницFPVFreerider Manual PDFLejeune HerveОценок пока нет
- FPV Freerider ManualДокумент13 страницFPV Freerider ManualbiduleОценок пока нет
- BMW F20 Video Interface User ManualДокумент20 страницBMW F20 Video Interface User ManualPham Cao ThanhОценок пока нет
- HolyBro Micro OSD V2 ManualДокумент9 страницHolyBro Micro OSD V2 ManualAxel WandlaffОценок пока нет
- SimpleBGC 32bit Manual EngДокумент124 страницыSimpleBGC 32bit Manual EngIrwin BaeraОценок пока нет
- SimpleBGC 32bit Manual 2 63 EngДокумент83 страницыSimpleBGC 32bit Manual 2 63 Engdejan89npОценок пока нет
- Cncvietpro DDCS V3.1Документ44 страницыCncvietpro DDCS V3.1Anderson Azevedo TorresОценок пока нет
- GMB - STR - ffb2 ManualДокумент12 страницGMB - STR - ffb2 ManualalexandervkОценок пока нет
- Unit-Iv Microcontroller Fundamentals For Basic Programming: GpiosДокумент21 страницаUnit-Iv Microcontroller Fundamentals For Basic Programming: GpiossrikanthОценок пока нет
- Index: Product Part NumberДокумент27 страницIndex: Product Part Numberalper sungurОценок пока нет
- F-Q Series Robot GOT QSGДокумент17 страницF-Q Series Robot GOT QSGJaime Roberto ArispeОценок пока нет
- SMC4-4-16A16B Four-Axis Motion Controller Instruction ManualДокумент14 страницSMC4-4-16A16B Four-Axis Motion Controller Instruction ManuallucaОценок пока нет
- 680A Version 45Документ27 страниц680A Version 45Patricio MontemayorОценок пока нет
- Monitor LG E1960sДокумент33 страницыMonitor LG E1960sGica SaulescuОценок пока нет
- Fanuc PM PDFДокумент26 страницFanuc PM PDFnamnp2007Оценок пока нет
- Bosch PTZ CamerasДокумент2 страницыBosch PTZ CamerasteslaguyОценок пока нет
- CRIUS MultiWii SE BoardДокумент13 страницCRIUS MultiWii SE BoardhkycflogОценок пока нет
- SKR MINI E3 ManualДокумент9 страницSKR MINI E3 ManualFacundo Nunes100% (1)
- SimpleBGC 32bit Manual 2 6x Eng PDFДокумент95 страницSimpleBGC 32bit Manual 2 6x Eng PDFVivek MauryaОценок пока нет
- Crius AIOP Manual MWCДокумент14 страницCrius AIOP Manual MWCNeilОценок пока нет
- CNC USB Controller Mk3: User ManualДокумент36 страницCNC USB Controller Mk3: User Manualeniola Eniola AyoОценок пока нет
- CNC USB Controller Mk3: User ManualДокумент20 страницCNC USB Controller Mk3: User ManualEva ML2011Оценок пока нет
- Simplebgc 32bit 3-Axis Software User Manual: Board Firmware GuiДокумент54 страницыSimplebgc 32bit 3-Axis Software User Manual: Board Firmware Guihung dangОценок пока нет
- AATDriver V5Документ8 страницAATDriver V5Lautaro AyoroaОценок пока нет
- OMNIBUSF4Pro (v2)Документ2 страницыOMNIBUSF4Pro (v2)farrelsyafiraОценок пока нет
- Emc Donate Version TutorialДокумент20 страницEmc Donate Version TutorialPIETREK PRO100% (1)
- CncmanДокумент66 страницCncmanxxxpressionОценок пока нет
- H6C M e 1Документ242 страницыH6C M e 1s_barriosОценок пока нет
- Bigtreetech Adxl345 v2.0 User Manual - 20231205Документ13 страницBigtreetech Adxl345 v2.0 User Manual - 20231205dhamika186Оценок пока нет
- Sgm-209 Manual enДокумент25 страницSgm-209 Manual enShashank RathoreОценок пока нет
- Gcu 20220928Документ43 страницыGcu 20220928Cl FaОценок пока нет
- XGY1000 Head TrackerДокумент14 страницXGY1000 Head TrackerjesusifcОценок пока нет
- Mobius ManualДокумент19 страницMobius ManualHowardgfОценок пока нет
- Specification&Installation: - . MODEL: QVL - RCD510-V0 - . P/N: AD-0909-001Документ26 страницSpecification&Installation: - . MODEL: QVL - RCD510-V0 - . P/N: AD-0909-001lipfi123Оценок пока нет
- Service Letter 1140Документ22 страницыService Letter 1140Leandro BernardesОценок пока нет
- 757-4002-383 Nexcom715Документ10 страниц757-4002-383 Nexcom715Admir Talic100% (1)
- CNC Usb Controlle Mdk2-9axisДокумент36 страницCNC Usb Controlle Mdk2-9axisCipriano M RogerioОценок пока нет
- KS0096 Keyestudio CNC KitДокумент21 страницаKS0096 Keyestudio CNC KitJonatán Hugo AvendañoОценок пока нет
- Manual Egreat PDFДокумент29 страницManual Egreat PDFangelos31Оценок пока нет
- Arduino Uno CNC ShieldДокумент11 страницArduino Uno CNC ShieldMărian IoanОценок пока нет
- 91Px1URzabL PDFДокумент13 страниц91Px1URzabL PDFjacque larry kevin mbarga nkoloОценок пока нет
- Helipal Helicox TG 1 Manual v1 1Документ13 страницHelipal Helicox TG 1 Manual v1 1Kang YAyanОценок пока нет
- Onan Detector PDFДокумент95 страницOnan Detector PDFonyx_luciano100% (6)
- CurrentДокумент4 страницыCurrentAshok PradhanОценок пока нет
- Solar TДокумент161 страницаSolar TDaniel MilosevskiОценок пока нет
- GEZE Installation Instructions en 665576Документ32 страницыGEZE Installation Instructions en 665576PiotrОценок пока нет
- 9910 An-H48Документ4 страницы9910 An-H48Adii HernandezОценок пока нет
- Electromagnetic Lock Installation Instruction (Waterproof Series)Документ4 страницыElectromagnetic Lock Installation Instruction (Waterproof Series)Victor BitarОценок пока нет
- MIT Radiaton Lab Series V25 Theory of ServomechanismsДокумент384 страницыMIT Radiaton Lab Series V25 Theory of Servomechanismskgrhoads0% (1)
- Silicon N Channel MOSFET Tetrode BF 998: FeaturesДокумент8 страницSilicon N Channel MOSFET Tetrode BF 998: FeatureshaОценок пока нет
- Using Spectrum Laboratory (Spec Lab) For Precise Audio Frequency MeasurementsДокумент16 страницUsing Spectrum Laboratory (Spec Lab) For Precise Audio Frequency MeasurementsTomy1969Оценок пока нет
- Manual For 11Kv OD PCVCBДокумент15 страницManual For 11Kv OD PCVCBChandan KumarОценок пока нет
- Notes On Photonics - Part IIДокумент189 страницNotes On Photonics - Part IIReiaОценок пока нет
- TBC FordДокумент3 страницыTBC FordPepe AlonzoОценок пока нет
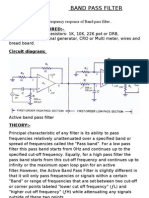
- Band Pass FilterДокумент3 страницыBand Pass FilterShruti MathurОценок пока нет
- Kcap Manual r1.0Документ12 страницKcap Manual r1.0fvozzella3Оценок пока нет
- Panasonic Sa-Ht855e Eb EgДокумент119 страницPanasonic Sa-Ht855e Eb EgNuno SobreiroОценок пока нет
- Activity Sheet Session 9-MORADO, NANETTEДокумент4 страницыActivity Sheet Session 9-MORADO, NANETTENanette MoradoОценок пока нет
- Computers As Components 2nd Edi - Wayne WolfДокумент815 страницComputers As Components 2nd Edi - Wayne WolfShubham RajОценок пока нет
- Aalborg Universitet: Møller, HenrikДокумент49 страницAalborg Universitet: Møller, HenrikStefana JuncuОценок пока нет
- Smart Console: User ManualДокумент50 страницSmart Console: User ManualВасиль Лопушанський100% (1)
- Single Phase Full-Wave Controlled Rectifier Fed DC DrivesДокумент3 страницыSingle Phase Full-Wave Controlled Rectifier Fed DC DrivestoshaliОценок пока нет
- Schedule of Rate, Both Civil and Mechanical/Electrical With All Corrigendum and Addendum As On 03-Nov-2021Документ159 страницSchedule of Rate, Both Civil and Mechanical/Electrical With All Corrigendum and Addendum As On 03-Nov-2021SK FARIDULОценок пока нет
- Voltage References and BiasingДокумент15 страницVoltage References and BiasingSintherОценок пока нет
- Abhijeet ShindeДокумент5 страницAbhijeet ShindeAbhijeet ShindeОценок пока нет
- Elt ArtexДокумент85 страницElt Artexcasoliromolo9746Оценок пока нет
- Ilovepdf Merged-8Документ56 страницIlovepdf Merged-8Kobe MartinezОценок пока нет
- Interfacing Temperature Sensor With MPLAB Xpress Evaluation Board Using I2C CommunicationДокумент13 страницInterfacing Temperature Sensor With MPLAB Xpress Evaluation Board Using I2C CommunicationsivaОценок пока нет
- Modbus Ports MomentumДокумент29 страницModbus Ports MomentummorthredОценок пока нет
- Micom P740: Numerical Busbar ProtectionДокумент386 страницMicom P740: Numerical Busbar ProtectionDinh Xuan Duyet100% (1)
- Powertrain Control Module (PCM) : Pin No. Description Connected ToДокумент24 страницыPowertrain Control Module (PCM) : Pin No. Description Connected ToEd KlbОценок пока нет
- Electric Force and Its Applications and Related ProblemsДокумент2 страницыElectric Force and Its Applications and Related Problemssibghamehboob6Оценок пока нет
- Arizona, Utah & New Mexico: A Guide to the State & National ParksОт EverandArizona, Utah & New Mexico: A Guide to the State & National ParksРейтинг: 4 из 5 звезд4/5 (1)
- New York & New Jersey: A Guide to the State & National ParksОт EverandNew York & New Jersey: A Guide to the State & National ParksОценок пока нет
- Japanese Gardens Revealed and Explained: Things To Know About The Worlds Most Beautiful GardensОт EverandJapanese Gardens Revealed and Explained: Things To Know About The Worlds Most Beautiful GardensОценок пока нет
- Naples, Sorrento & the Amalfi Coast Adventure Guide: Capri, Ischia, Pompeii & PositanoОт EverandNaples, Sorrento & the Amalfi Coast Adventure Guide: Capri, Ischia, Pompeii & PositanoРейтинг: 5 из 5 звезд5/5 (1)
- South Central Alaska a Guide to the Hiking & Canoeing Trails ExcerptОт EverandSouth Central Alaska a Guide to the Hiking & Canoeing Trails ExcerptРейтинг: 5 из 5 звезд5/5 (1)