Вам также может понравиться
- Part 3Документ195 страницPart 3Amine HadjiОценок пока нет
- Method of Moments Using Monte Carlo SimulationДокумент27 страницMethod of Moments Using Monte Carlo SimulationosmargarnicaОценок пока нет
- 6 Monte Carlo Simulation: Exact SolutionДокумент10 страниц6 Monte Carlo Simulation: Exact SolutionYuri PazaránОценок пока нет
- Unit V Graphical ModelsДокумент23 страницыUnit V Graphical ModelsIndumathy ParanthamanОценок пока нет
- 214.7 (MH)Документ6 страниц214.7 (MH)sommukhОценок пока нет
- A Short Tutorial On The Expectation-Maximization AlgorithmДокумент25 страницA Short Tutorial On The Expectation-Maximization AlgorithmaezixОценок пока нет
- Uniform Distribution (Continuous)Документ5 страницUniform Distribution (Continuous)afjkjchhghgfbfОценок пока нет
- Two-Point Estimates in ProbabilitiesДокумент7 страницTwo-Point Estimates in ProbabilitiesrannscribdОценок пока нет
- On The Markov Chain Monte Carlo (MCMC) Method: Rajeeva L KarandikarДокумент24 страницыOn The Markov Chain Monte Carlo (MCMC) Method: Rajeeva L KarandikarDiana DilipОценок пока нет
- Armcsept06 AR Dalam MCMCДокумент18 страницArmcsept06 AR Dalam MCMCAnindya ApriliyantiОценок пока нет
- A Kolmogorov-Smirnov Test For R Samples: Walter B OhmДокумент24 страницыA Kolmogorov-Smirnov Test For R Samples: Walter B OhmJessica LoongОценок пока нет
- Detecting A Vector Based On Linear Measurements: Ery Arias-CastroДокумент9 страницDetecting A Vector Based On Linear Measurements: Ery Arias-Castroshyam_utdОценок пока нет
- Regularized Compression of A Noisy Blurred ImageДокумент13 страницRegularized Compression of A Noisy Blurred ImageAnonymous lVQ83F8mCОценок пока нет
- Probability & Statistics Theme 6 Sampling Distribution Random SampleДокумент4 страницыProbability & Statistics Theme 6 Sampling Distribution Random Sampleraoulduke88Оценок пока нет
- Bayesian Monte Carlo: Carl Edward Rasmussen and Zoubin GhahramaniДокумент8 страницBayesian Monte Carlo: Carl Edward Rasmussen and Zoubin GhahramanifishelderОценок пока нет
- Nonlife Actuarial Models: Applications of Monte Carlo MethodsДокумент46 страницNonlife Actuarial Models: Applications of Monte Carlo Methodsvoikien01Оценок пока нет
- 3.6: General Hypothesis TestsДокумент6 страниц3.6: General Hypothesis Testssound05Оценок пока нет
- Bayesian Analysis of Extreme Operational Losses: Chyng-Lan LiangДокумент17 страницBayesian Analysis of Extreme Operational Losses: Chyng-Lan LiangOnkar BagariaОценок пока нет
- Research Article: Tree-Based Backtracking Orthogonal Matching Pursuit For Sparse Signal ReconstructionДокумент9 страницResearch Article: Tree-Based Backtracking Orthogonal Matching Pursuit For Sparse Signal ReconstructionAnonymous 9Tu1hLnwE8Оценок пока нет
- Summary and Discussion Of: "Stability Selection"Документ7 страницSummary and Discussion Of: "Stability Selection"GokuОценок пока нет
- Dembinski 2019Документ25 страницDembinski 2019CVОценок пока нет
- 9.1. Prob - StatsДокумент19 страниц9.1. Prob - StatsAnkit KabiОценок пока нет
- Method Least SquaresДокумент7 страницMethod Least SquaresZahid SaleemОценок пока нет
- Mme PDFДокумент9 страницMme PDFHöîkí YöñОценок пока нет
- The Sample Average Approximation Method Applied To Stochastic Routing Problems A Computational StudyДокумент45 страницThe Sample Average Approximation Method Applied To Stochastic Routing Problems A Computational StudyJianli ShiОценок пока нет
- Probability and StatisticsДокумент28 страницProbability and StatisticsQuangQuảQuyếtОценок пока нет
- ESL: Chapter 1: 1.1 Introduction To Linear RegressionДокумент4 страницыESL: Chapter 1: 1.1 Introduction To Linear RegressionPete Jacopo Belbo CayaОценок пока нет
- Quantum State Tomography Via Linear Regression Estimation: Scientific ReportsДокумент6 страницQuantum State Tomography Via Linear Regression Estimation: Scientific ReportsYang YiОценок пока нет
- Generating Random Samples From User-Defined Distributions: 11, Number 2, Pp. 299-304Документ6 страницGenerating Random Samples From User-Defined Distributions: 11, Number 2, Pp. 299-304Nam LêОценок пока нет
- F (X) Is ReviewedДокумент18 страницF (X) Is ReviewedSumedh KakdeОценок пока нет
- Modified Moment Estimation For A Two Parameter Gamma DistributionДокумент9 страницModified Moment Estimation For A Two Parameter Gamma DistributionInternational Organization of Scientific Research (IOSR)Оценок пока нет
- A No-Truncation Approach To Cosmic Microwave Background AnisotropiesДокумент19 страницA No-Truncation Approach To Cosmic Microwave Background AnisotropiessatyabashaОценок пока нет
- Variational Problems in Machine Learning and Their Solution With Finite ElementsДокумент11 страницVariational Problems in Machine Learning and Their Solution With Finite ElementsJohn David ReaverОценок пока нет
- Snelson 2005 Sparse GpsДокумент8 страницSnelson 2005 Sparse GpsDonlapark PornnopparathОценок пока нет
- An Adaptive Metropolis Algorithm: 1350 7265 # 2001 ISI/BSДокумент20 страницAn Adaptive Metropolis Algorithm: 1350 7265 # 2001 ISI/BSSandeep GogadiОценок пока нет
- CH 14simulationmethods24Документ10 страницCH 14simulationmethods24joyashariОценок пока нет
- Report4 Density Estimation AllДокумент63 страницыReport4 Density Estimation AllJohnОценок пока нет
- Cappé Et Al. 2012 - Population Monte CarloДокумент24 страницыCappé Et Al. 2012 - Population Monte CarloLucas RibeiroОценок пока нет
- Bootstrapping The General Linear Hypothesis Test: Pedro DelicadoДокумент17 страницBootstrapping The General Linear Hypothesis Test: Pedro DelicadoAtoy ValdezОценок пока нет
- Jackknife: (I) IntroductionДокумент11 страницJackknife: (I) IntroductionAlexandra CatalinaОценок пока нет
- RVM TutorialДокумент25 страницRVM Tutorialrcoca_1Оценок пока нет
- W10 - Module 008 Linear Regression and CorrelationДокумент6 страницW10 - Module 008 Linear Regression and CorrelationCiajoy KimОценок пока нет
- 9084 Thompson Sampling and Approximate Inference VINAIДокумент11 страниц9084 Thompson Sampling and Approximate Inference VINAIGinaMart - Ngon khỏe mỗi ngàyОценок пока нет
- A Simple Explanation of Partial Least SquaresДокумент10 страницA Simple Explanation of Partial Least Squarestianao kangОценок пока нет
- Statistical ApplicationДокумент18 страницStatistical ApplicationArqam AbdulaОценок пока нет
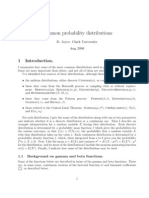
- Common Probability Distributions: D. Joyce, Clark University Aug 2006Документ9 страницCommon Probability Distributions: D. Joyce, Clark University Aug 2006helloThar213Оценок пока нет
- Applications of Generalized Method of Moments Estimation: Jeffrey M. WooldridgeДокумент14 страницApplications of Generalized Method of Moments Estimation: Jeffrey M. WooldridgeLuca SomigliОценок пока нет
- Jep 15 4 87Документ26 страницJep 15 4 87Frann AraОценок пока нет
- 4lectures Statistical PhysicsДокумент37 страниц4lectures Statistical Physicsdapias09Оценок пока нет
- Reuse of Paths in Light Source AnimationДокумент4 страницыReuse of Paths in Light Source AnimationSezen DönmezОценок пока нет
- Contol of QuairyststaeДокумент2 страницыContol of Quairyststaeaskazy007Оценок пока нет
- Linear Models: The Least-Squares MethodДокумент24 страницыLinear Models: The Least-Squares MethodAnimated EngineerОценок пока нет
- Remezr2 ArxivДокумент30 страницRemezr2 ArxivFlorinОценок пока нет
- LHSДокумент4 страницыLHSpachernyangyuenОценок пока нет
- Lecture4 Mech SUДокумент17 страницLecture4 Mech SUNazeeh Abdulrhman AlbokaryОценок пока нет
- Ten ProblemsДокумент31 страницаTen ProblemsCH. Kranthi RekhaОценок пока нет
- A-level Maths Revision: Cheeky Revision ShortcutsОт EverandA-level Maths Revision: Cheeky Revision ShortcutsРейтинг: 3.5 из 5 звезд3.5/5 (8)
- PHP Dan MySQLДокумент81 страницаPHP Dan MySQLdeserver100% (3)
- Iklan Lowongan Manos 1 1Документ1 страницаIklan Lowongan Manos 1 1Aditya WijayantoОценок пока нет
- Wireless Sensor Networks The Basics Part I PDFДокумент8 страницWireless Sensor Networks The Basics Part I PDFAditya WijayantoОценок пока нет
- 1 s2.0 S1570870504000459 MainДокумент42 страницы1 s2.0 S1570870504000459 MainAditya WijayantoОценок пока нет
- T Rec Y.1540 201103 I!!pdf eДокумент52 страницыT Rec Y.1540 201103 I!!pdf emilemiletiОценок пока нет
- RFC 6126 - The Babel Routing ProtocolДокумент90 страницRFC 6126 - The Babel Routing ProtocolAditya WijayantoОценок пока нет
- Clustering AlgorithmsДокумент42 страницыClustering AlgorithmsNasr CheaibОценок пока нет
- Introduction To: Ma EdДокумент42 страницыIntroduction To: Ma EdAditya WijayantoОценок пока нет
- Install and Configure Linphone - OpenMCUДокумент5 страницInstall and Configure Linphone - OpenMCUAditya WijayantoОценок пока нет
- PHP Dan MySQLДокумент81 страницаPHP Dan MySQLdeserver100% (3)
- Component Based DevvvДокумент25 страницComponent Based DevvvAditya WijayantoОценок пока нет
- Embedded 28Документ28 страницEmbedded 28ahamedОценок пока нет
- Salcedoss@inta - Es Mongef@inta - Es Palaciosg@inta - Es Fgandia@upm - Es Angel - Rodriguez.sevillano@upm - EsДокумент7 страницSalcedoss@inta - Es Mongef@inta - Es Palaciosg@inta - Es Fgandia@upm - Es Angel - Rodriguez.sevillano@upm - EsBruno AlvesОценок пока нет
- 31 - JCIT - JUNE - Binder1-31Документ8 страниц31 - JCIT - JUNE - Binder1-31Aditya WijayantoОценок пока нет
- Wang G D 2012Документ107 страницWang G D 2012Aditya WijayantoОценок пока нет
- Iptv in Vanet'S With Wimax Access NetworkДокумент6 страницIptv in Vanet'S With Wimax Access NetworkAditya WijayantoОценок пока нет
- Prostho 7Документ7 страницProstho 7Aditya WijayantoОценок пока нет
- 04 Surveys LeeДокумент10 страниц04 Surveys LeeRaheleh AmirlatifiОценок пока нет
- Wang G D 2012Документ107 страницWang G D 2012Aditya WijayantoОценок пока нет
- Christian MysticismДокумент4 страницыChristian MysticismRahmat SetiawanОценок пока нет
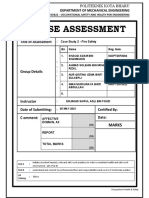
- Rubric Case Study 2 Group 2Документ3 страницыRubric Case Study 2 Group 2Abang BulanОценок пока нет
- Blog Post #6Документ5 страницBlog Post #6zregina96Оценок пока нет
- Introduction To Cosmology Matt Roots - IndexДокумент9 страницIntroduction To Cosmology Matt Roots - IndexTiago MarquesОценок пока нет
- Live Your Core Values: 30 Minute Exercise To Increase Your SuccessДокумент4 страницыLive Your Core Values: 30 Minute Exercise To Increase Your SuccessJagat RathoreОценок пока нет
- Defining Sustainable UrbanismДокумент11 страницDefining Sustainable UrbanismMohamedMostafaSanadОценок пока нет
- Quarterly: Sabbath School LessonДокумент28 страницQuarterly: Sabbath School LessonBrian S. MarksОценок пока нет
- Animal Farm Summative AssessmentДокумент5 страницAnimal Farm Summative AssessmentthpolanskyОценок пока нет
- Encouraging What Is Not Figural in The Gestalt GroupДокумент8 страницEncouraging What Is Not Figural in The Gestalt GroupevgeniiОценок пока нет
- Guidebook Machine Learning Basics PDFДокумент16 страницGuidebook Machine Learning Basics PDFNguyen Duc AnhОценок пока нет
- IFEM AppP PDFДокумент7 страницIFEM AppP PDFPippo MiriОценок пока нет
- Solution of Engineering Mechanics For UCER Students 1995976039Документ18 страницSolution of Engineering Mechanics For UCER Students 1995976039Gulshan KumarОценок пока нет
- Meditation Practice Manual v4-3Документ36 страницMeditation Practice Manual v4-3Karma Arnab100% (1)
- Jose Prager - Name & SignДокумент7 страницJose Prager - Name & SignFreddie666100% (4)
- John Locke View On Personal IdentityДокумент5 страницJohn Locke View On Personal Identityadrian jamesОценок пока нет
- What Anarchy Isn't - Larken RoseДокумент41 страницаWhat Anarchy Isn't - Larken RoseEscudoVoluntario100% (8)
- PQD 1 - Quality (2016/2017)Документ154 страницыPQD 1 - Quality (2016/2017)Giuseppe La PlacaОценок пока нет
- Revision Unit 3 Marriage & Family Life - IGCSE Religious StudiesДокумент27 страницRevision Unit 3 Marriage & Family Life - IGCSE Religious Studiesaneeshj1Оценок пока нет
- Case Study: BhopalДокумент2 страницыCase Study: BhopalShaqi_aprilОценок пока нет
- Sambuhay - Ash WednesdayДокумент4 страницыSambuhay - Ash Wednesdaychen1995Оценок пока нет
- Dynamics of Organisational CultureДокумент10 страницDynamics of Organisational CulturesahilОценок пока нет
- Listening Styles and Listening StrategiesДокумент4 страницыListening Styles and Listening StrategiesBladyPanopticoОценок пока нет
- Trends in The Structural Design of High-Rise Steel Structures in JapanДокумент6 страницTrends in The Structural Design of High-Rise Steel Structures in JapanRoshan de SilvaОценок пока нет
- Gurudutt VidyarthiДокумент304 страницыGurudutt Vidyarthiprogrammer0% (1)
- Disavowal of Acknowledged Truths': Ideology, Symbol and Culture in The Filipino Short StoryДокумент22 страницыDisavowal of Acknowledged Truths': Ideology, Symbol and Culture in The Filipino Short StoryAndrea VargasОценок пока нет
- Reciprocal Teaching Approach With Self-Regulated Learning (RT-SRL) : Effects On Students' Reading Comprehension, Achievement and Self-Regulation in ChemistryДокумент29 страницReciprocal Teaching Approach With Self-Regulated Learning (RT-SRL) : Effects On Students' Reading Comprehension, Achievement and Self-Regulation in ChemistryAmadeus Fernando M. PagenteОценок пока нет
- Handbook For WritersДокумент433 страницыHandbook For Writersgelunn100% (1)
- MSC Social Development Practice at The Bartlett Development Planning Unit. University College LondonДокумент2 страницыMSC Social Development Practice at The Bartlett Development Planning Unit. University College LondonThe Bartlett Development Planning Unit - UCLОценок пока нет
- Bayesian Statistics For Data Science - Towards Data ScienceДокумент7 страницBayesian Statistics For Data Science - Towards Data ScienceDom DeSiciliaОценок пока нет
- A Model Among Towns by R. A. MallettДокумент347 страницA Model Among Towns by R. A. MallettAlan WoolcottОценок пока нет