Вам также может понравиться
- Toxicity of Ag NPsДокумент13 страницToxicity of Ag NPsaravindsnistОценок пока нет
- My Electronics ReferenceДокумент5 страницMy Electronics ReferencearavindsnistОценок пока нет
- Introduction To BoilersДокумент22 страницыIntroduction To BoilersaravindsnistОценок пока нет
- Cellphone ChargersДокумент11 страницCellphone ChargersmwthegreatОценок пока нет
- Blue 120508033609 Phpapp01Документ22 страницыBlue 120508033609 Phpapp01aravindsnistОценок пока нет
- My Travel DestinationsДокумент6 страницMy Travel DestinationsaravindsnistОценок пока нет
- DTMF Based Cell Phone Operated Toy Car-3Документ15 страницDTMF Based Cell Phone Operated Toy Car-3aravindsnistОценок пока нет
- DSBSC ReportДокумент8 страницDSBSC ReportaravindsnistОценок пока нет
- Format For Lab ReportДокумент2 страницыFormat For Lab ReportaravindsnistОценок пока нет
- Blueeyestechnology Document1 130312132338 Phpapp01Документ30 страницBlueeyestechnology Document1 130312132338 Phpapp01Sushant SharmaОценок пока нет
- Blue Eyes Tech.Документ19 страницBlue Eyes Tech.aravindsnistОценок пока нет
- Blue Eyes Tech.Документ19 страницBlue Eyes Tech.aravindsnistОценок пока нет
- Final Notes On Tech WRTNGДокумент27 страницFinal Notes On Tech WRTNGaravindsnistОценок пока нет
- Final Notes On Tech WRTNGДокумент27 страницFinal Notes On Tech WRTNGaravindsnistОценок пока нет
- SyllabusДокумент3 страницыSyllabusaravindsnistОценок пока нет
- OLEDДокумент10 страницOLEDaravindsnistОценок пока нет
- Sample Technical Paper Doc FormatДокумент6 страницSample Technical Paper Doc FormataravindsnistОценок пока нет
- M.tech Project GuidelinesДокумент5 страницM.tech Project Guidelinesaravindsnist100% (1)
- My Travel DestinationsДокумент6 страницMy Travel DestinationsaravindsnistОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Thesis DocumentДокумент21 страницаThesis DocumentChris Lorenz83% (18)
- Getting Started With Experion Software GuideДокумент28 страницGetting Started With Experion Software Guidebeerman81Оценок пока нет
- Configure and Verify Device ManagementДокумент24 страницыConfigure and Verify Device ManagementJose L. RodriguezОценок пока нет
- 2 Parameter Circular (61-80)Документ6 страниц2 Parameter Circular (61-80)Papan SarkarОценок пока нет
- Create Cloudwatch Cluster Ang Get DataДокумент3 страницыCreate Cloudwatch Cluster Ang Get DataGovind HivraleОценок пока нет
- Concrete Mix DesignДокумент36 страницConcrete Mix Designamitbd80% (5)
- Chemistry Pupil Book 10 - 12Документ260 страницChemistry Pupil Book 10 - 12Mawolo WuolewuОценок пока нет
- ISORIA 20 BrochureДокумент16 страницISORIA 20 BrochuremariodalОценок пока нет
- A Handheld Gun Detection Using Faster R-CNN Deep LearningДокумент5 страницA Handheld Gun Detection Using Faster R-CNN Deep LearningJanderson LiraОценок пока нет
- Early Thermal CrackingДокумент2 страницыEarly Thermal Crackingsudhir12345Оценок пока нет
- Comentarios-103 - Parte I - English PDFДокумент89 страницComentarios-103 - Parte I - English PDFSakthivel VОценок пока нет
- Python (Dictionary)Документ54 страницыPython (Dictionary)shahrukhkr.gptОценок пока нет
- 6PC Arrears CalculatorДокумент6 страниц6PC Arrears Calculatoranon-530704Оценок пока нет
- Presupposition: A Short PresentationДокумент13 страницPresupposition: A Short PresentationShaimaa SuleimanОценок пока нет
- ReviewerДокумент6 страницReviewerNeo GarceraОценок пока нет
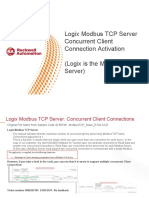
- Change To ModbusTCP Slave R102Документ8 страницChange To ModbusTCP Slave R102Евгений МалыченкоОценок пока нет
- ProblemsДокумент1 страницаProblemsBeesam Ramesh KumarОценок пока нет
- ch12 칼리스터 재료과학과 공학 답지Документ71 страницаch12 칼리스터 재료과학과 공학 답지hayun9999999Оценок пока нет
- Mach4 G and M Code Reference ManualДокумент81 страницаMach4 G and M Code Reference ManualMegi Setiawan SОценок пока нет
- Partial Derivative MCQs AssignementДокумент14 страницPartial Derivative MCQs AssignementMian ArhamОценок пока нет
- CharacterizigPlant Canopies With Hemispherical PhotographsДокумент16 страницCharacterizigPlant Canopies With Hemispherical PhotographsGabriel TiveronОценок пока нет
- Canal RegulatorДокумент13 страницCanal RegulatorBibhuti Bhusan Sahoo100% (1)
- Cutting - in - Practice - Blades IndicationsДокумент24 страницыCutting - in - Practice - Blades IndicationsHector Elias Mercedes HazimОценок пока нет
- CBSE NCERT Solutions For Class 9 Science Chapter 10: Back of Chapter QuestionsДокумент9 страницCBSE NCERT Solutions For Class 9 Science Chapter 10: Back of Chapter QuestionsRTОценок пока нет
- DSA Lab1Документ22 страницыDSA Lab1dukeyasser107967Оценок пока нет
- Moses Mabhida Stadium PDFДокумент4 страницыMoses Mabhida Stadium PDFHCStepОценок пока нет
- Weighted BWF V3.0Документ7 страницWeighted BWF V3.0Efrain CorroОценок пока нет
- CH 13Документ27 страницCH 13Shaivy TyagiОценок пока нет
- Spring - Design - Important Points and CalculationДокумент17 страницSpring - Design - Important Points and CalculationvenkateswaranОценок пока нет
- Recent Advances in Biophoton Research and Its Applications - Quantum Theory of Biophoton EmissionДокумент54 страницыRecent Advances in Biophoton Research and Its Applications - Quantum Theory of Biophoton Emissionfrederic dugenouxОценок пока нет