Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- 307 Bsi PinoutДокумент5 страниц307 Bsi Pinoutmohhizbar0% (1)
- Manual Cutmaster 82Документ84 страницыManual Cutmaster 82Ferley Cruz100% (1)
- Regular Expressions in QTPДокумент15 страницRegular Expressions in QTPBhargav S RajendraОценок пока нет
- Series: 5-Axis Double Column Machine CenterДокумент11 страницSeries: 5-Axis Double Column Machine CenterPrs AutomationОценок пока нет
- Standard Techniques of Stress Corrosion Cracking Testing - A ReviewДокумент15 страницStandard Techniques of Stress Corrosion Cracking Testing - A ReviewMarly Blanco VeraОценок пока нет
- Flow CalculationsДокумент3 страницыFlow CalculationsulamusukhОценок пока нет
- Experiment / Assignment / Tutorial No. 1 Grade: Aa / Ab / BB / BC / CC / CD /DD Signature of The Faculty In-Charge With DateДокумент10 страницExperiment / Assignment / Tutorial No. 1 Grade: Aa / Ab / BB / BC / CC / CD /DD Signature of The Faculty In-Charge With DateSourabhОценок пока нет
- Datasheet Ls 7222Документ4 страницыDatasheet Ls 7222Martín NestaОценок пока нет
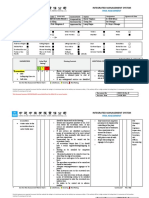
- CSCEC HSE-F-01 Risk Assessment Form - Excavation& Backfilling - RA-02Документ12 страницCSCEC HSE-F-01 Risk Assessment Form - Excavation& Backfilling - RA-02Dan SarmientoОценок пока нет
- AMP PIP Test ManualДокумент8 страницAMP PIP Test ManualknjizaraknjigaОценок пока нет
- SOP Name Date Issued: 1 ScopeДокумент20 страницSOP Name Date Issued: 1 Scopeswapon kumar shillОценок пока нет
- List of Useful Keyboard Shortcuts For Command Prompt in WindowsДокумент7 страницList of Useful Keyboard Shortcuts For Command Prompt in WindowsMahmudul HasanОценок пока нет
- AP Lab Assignment 1Документ30 страницAP Lab Assignment 1Ahmad AlsharefОценок пока нет
- Piston Mindman Mcgs-03!32!200Документ9 страницPiston Mindman Mcgs-03!32!200Micky CeceñaОценок пока нет
- An Introduction To Control Network PDFДокумент44 страницыAn Introduction To Control Network PDFsipteckОценок пока нет
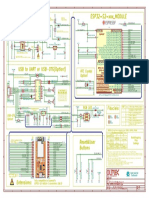
- ESP32 S2 DevKit Lipo - Rev - B1Документ1 страницаESP32 S2 DevKit Lipo - Rev - B1Inventor TestОценок пока нет
- Seminar On: Underwater WeldingДокумент30 страницSeminar On: Underwater WeldingGAJENDRA KUMARОценок пока нет
- Effect of Tillage and Crop Roration On Pore Size DistributionДокумент12 страницEffect of Tillage and Crop Roration On Pore Size DistributionWubetie MengistОценок пока нет
- General CatalogueДокумент19 страницGeneral Cataloguedbristow21Оценок пока нет
- Overall Heat Transfer CoefficientДокумент4 страницыOverall Heat Transfer Coefficientvenka07Оценок пока нет
- Non Linear Periodic Solution (Limit Cycle) PDFДокумент18 страницNon Linear Periodic Solution (Limit Cycle) PDFanuj kumarОценок пока нет
- Toyota Truck SequoiaДокумент16 страницToyota Truck SequoiaD3NYОценок пока нет
- Jaspersoft Embedding GuideДокумент44 страницыJaspersoft Embedding Guidevignesh85Оценок пока нет
- Voltage Dividers and Current DividersДокумент24 страницыVoltage Dividers and Current DividersRon Rex100% (1)
- Introduction of Technical Drawing (Automotive Major)Документ10 страницIntroduction of Technical Drawing (Automotive Major)Jake Casiple100% (1)
- Noise Mapping in FactoryДокумент5 страницNoise Mapping in FactoryNor RazmanОценок пока нет
- General Thread: No Flavor Hard Math Bad ArtДокумент4 страницыGeneral Thread: No Flavor Hard Math Bad ArtAnonymous q9PRRY25% (4)
- Deck Machinery PartsДокумент3 страницыDeck Machinery Partsmihat jasneyОценок пока нет
- CB 160 Manual de Servicio PDFДокумент336 страницCB 160 Manual de Servicio PDFOscar Eduardo Vera Aguirre100% (2)
- 01 Introduction To Databases (Sept 10)Документ25 страниц01 Introduction To Databases (Sept 10)Nathan WilsonОценок пока нет