Вам также может понравиться
- Qué Son Los Fluidos MultifasicosДокумент3 страницыQué Son Los Fluidos MultifasicosBrajhann TámaraОценок пока нет
- Compactacion y SubsidenciaДокумент20 страницCompactacion y SubsidenciaJdscsxs BCОценок пока нет
- Miniproyecto Campo YucaДокумент19 страницMiniproyecto Campo YucaEmily Guevara ChavezОценок пока нет
- Aumento de Produccion en Campos MadurosДокумент7 страницAumento de Produccion en Campos Maduroslabrujis100% (1)
- 1 - Desarrollo y Aplicacion de Programas de Computadora para Hidraulica de Perforacion y Cementacion de PozosДокумент37 страниц1 - Desarrollo y Aplicacion de Programas de Computadora para Hidraulica de Perforacion y Cementacion de PozosAndres Salas100% (1)
- Análisis e Interpretación Convencional de Pruebas de PozosДокумент76 страницAnálisis e Interpretación Convencional de Pruebas de PozosJinson SantanaОценок пока нет
- Simulador Eclipse Seccion ScheduleДокумент12 страницSimulador Eclipse Seccion ScheduleMauricio Pertuz ParraОценок пока нет
- 06 - Bombeo Mecanico Diseño Rodstar SimplificadoДокумент74 страницы06 - Bombeo Mecanico Diseño Rodstar SimplificadoJolvin Trejo OliveraОценок пока нет
- Build Up - MDHДокумент22 страницыBuild Up - MDHWilsa Angelica Arias ArroyoОценок пока нет
- Prosper AbrilДокумент19 страницProsper Abrilcesil reynaldo callaguara bañosОценок пока нет
- Aplicación Del Análisis Nodal para Incrementar La Productividad de Un Pozo1Документ10 страницAplicación Del Análisis Nodal para Incrementar La Productividad de Un Pozo1dacardonarОценок пока нет
- Concepto Limite TecnicoДокумент19 страницConcepto Limite Tecniconetoboy100% (1)
- Campo RabasaДокумент3 страницыCampo RabasaSol Garcia VazquezОценок пока нет
- Pozos Térmicos y Problemas Asociados A Pozos Térmicos FinalДокумент41 страницаPozos Térmicos y Problemas Asociados A Pozos Térmicos Finalclaudia_leal_80% (1)
- 01 Registros Electricos en Agujero Descubierto PDFДокумент70 страниц01 Registros Electricos en Agujero Descubierto PDFJose Juan ViopОценок пока нет
- Correccion de Examen de YacimeintosДокумент7 страницCorreccion de Examen de YacimeintosAnonymous XtYVnDОценок пока нет
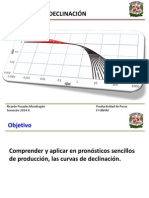
- Curvas de DeclinaciónДокумент26 страницCurvas de DeclinaciónEmmanuel SandovalОценок пока нет
- Ingeniería SchlumbergerДокумент12 страницIngeniería SchlumbergerNoriannysCentenoОценок пока нет
- Pozos de Gas Con Problemas de Carga de LiquidosДокумент19 страницPozos de Gas Con Problemas de Carga de LiquidosErnesto González MonteroОценок пока нет
- Casing - Drilling PDFДокумент200 страницCasing - Drilling PDFDavidОценок пока нет
- Presentación Procedimiento Asentamiento TR'sДокумент23 страницыPresentación Procedimiento Asentamiento TR'sPequeño GuerreroОценок пока нет
- Manual de DisparosДокумент123 страницыManual de DisparosOrlandoVentura100% (1)
- Tesis Final Actual XDДокумент17 страницTesis Final Actual XDPEDRO SIMON MARTINEZ RUMICHEОценок пока нет
- Pruebas de Pozos-1er Capítulo Marzo 2018Документ148 страницPruebas de Pozos-1er Capítulo Marzo 2018Cristopher OrtizОценок пока нет
- Siglo de La Perforación en México Pag 39Документ1 страницаSiglo de La Perforación en México Pag 39Moises Aguilar MendozaОценок пока нет
- PRUEBAS DE FORMACION MDT y XPTДокумент42 страницыPRUEBAS DE FORMACION MDT y XPTAndy Aldair Silupu AlemanОценок пока нет
- Crudos PesadosДокумент17 страницCrudos Pesadosmaria peñaОценок пока нет
- PTE BN Litoral 20 MMPCD Rev.01 - IMPДокумент19 страницPTE BN Litoral 20 MMPCD Rev.01 - IMPMauricio111011Оценок пока нет
- Pistones para Anillos Actuados Por PresionДокумент2 страницыPistones para Anillos Actuados Por PresionManoel Hermínio Vieira Neto100% (1)
- Complications Spanish PDFДокумент309 страницComplications Spanish PDFnestor100% (1)
- Descripcion Del Simulador BoastДокумент3 страницыDescripcion Del Simulador Boastwalter alonsoОценок пока нет
- Manual Adquisicion y Procesamiento Sismico PDFДокумент126 страницManual Adquisicion y Procesamiento Sismico PDFFabian Andres Perdomo LagunaОценок пока нет
- Evidencias de Difusion y Aplicacion de Las MP 2023-11-02Документ89 страницEvidencias de Difusion y Aplicacion de Las MP 2023-11-02fcoespitiamasterОценок пока нет
- Arreglos de Pozos PDFДокумент54 страницыArreglos de Pozos PDFIvanMauricioRuizОценок пока нет
- Proceso de Fabricacion de TP y TRДокумент2 страницыProceso de Fabricacion de TP y TRflacohenryОценок пока нет
- 4 - 1 VCD NegocioДокумент31 страница4 - 1 VCD NegocioTony CarranzaОценок пока нет
- Cementacion en Pozos Gasiferos PartesДокумент15 страницCementacion en Pozos Gasiferos PartesJosue Vladimir Tenorio CorderoОценок пока нет
- Prevencion de Arremetidas y Control de PozosДокумент32 страницыPrevencion de Arremetidas y Control de PozosMoises Jose Vivenes BastardoОценок пока нет
- Descontrol de PozoДокумент5 страницDescontrol de Pozoirene montoyaОценок пока нет
- ESP OIL y Lazarde, H. - Interpretacion de Perfiles de ProduccionДокумент200 страницESP OIL y Lazarde, H. - Interpretacion de Perfiles de ProduccionCarlos PerezОценок пока нет
- Proyecto Minifrac AreniscasДокумент11 страницProyecto Minifrac AreniscasEliud Sinhue R RivasОценок пока нет
- Cálculos de ReservasДокумент14 страницCálculos de ReservasLina Maria Cubillos RamirezОценок пока нет
- Dispositivo de Contro de FlujoДокумент33 страницыDispositivo de Contro de FlujoLui Escorza100% (1)
- Daño de FormacionДокумент21 страницаDaño de FormacionRosita Liliana MuñozОценок пока нет
- Dialnet EvaluacionYExperienciasEnElControlDeConificacionEn 6771110Документ18 страницDialnet EvaluacionYExperienciasEnElControlDeConificacionEn 6771110luis carrizoОценок пока нет
- Analisis Nodal y Curvas IPR (Darcy-Vogel)Документ37 страницAnalisis Nodal y Curvas IPR (Darcy-Vogel)FRANCISCO DAVID RIVERA MARTINEZОценок пока нет
- Facilidades Campo SachaДокумент175 страницFacilidades Campo Sachaarmandopc3Оценок пока нет
- Equipo 6 Fallas Graficas Manógrafo Aforo Cedulas Bombeo BNДокумент29 страницEquipo 6 Fallas Graficas Manógrafo Aforo Cedulas Bombeo BNCristo Nephtalí Sánchez CastilloОценок пока нет
- 324942914-Cuestionari QEДокумент2 страницы324942914-Cuestionari QEjuan paniagua cespedesОценок пока нет
- Trabajo de Intercambiadores, Bombas y CompresoresДокумент19 страницTrabajo de Intercambiadores, Bombas y CompresoresJesus Gomez CaprilesОценок пока нет
- Bombeo Hidraulico Tipo JetДокумент16 страницBombeo Hidraulico Tipo JetJesús Arturo Ramírez LópezОценок пока нет
- Manual Bolland Bombas APIДокумент27 страницManual Bolland Bombas APIJose Gabriel Hernandez FelixОценок пока нет
- Analisis FmecaДокумент15 страницAnalisis FmecaJose Tello Lezcano100% (1)
- Bombeo Hidráulico Tipo JetДокумент6 страницBombeo Hidráulico Tipo JetJorge FernandoОценок пока нет
- Bomba Subsuelo Bombeo MecanicoДокумент11 страницBomba Subsuelo Bombeo Mecanicooxido77100% (1)
- Práctico 3 - Bombeo MecánicoДокумент6 страницPráctico 3 - Bombeo MecánicoSaul Edwin Silva DuránОценок пока нет
- BopДокумент21 страницаBopBrendaArnezОценок пока нет
- Bomba de Concentrado - PLANTA CONCENTRADORAДокумент8 страницBomba de Concentrado - PLANTA CONCENTRADORAOscar Fal100% (1)
- Preparación del sistema de entintado, humectador y de los dispositivos de salida y acabado en máquinas de impresión offset. ARGI0109От EverandPreparación del sistema de entintado, humectador y de los dispositivos de salida y acabado en máquinas de impresión offset. ARGI0109Рейтинг: 5 из 5 звезд5/5 (1)
- Preparación y calibración del grupo de presión en máquinas de impresión offset. ARGI0109От EverandPreparación y calibración del grupo de presión en máquinas de impresión offset. ARGI0109Оценок пока нет
- Trabajo Ing. SistemasДокумент6 страницTrabajo Ing. SistemasHeyker GilОценок пока нет
- Oil HorsesДокумент3 страницыOil HorsesHeyker GilОценок пока нет
- TESIS Kaizen PDFДокумент76 страницTESIS Kaizen PDFhugoserrОценок пока нет
- Planteamiento HistorialДокумент1 страницаPlanteamiento HistorialHeyker GilОценок пока нет
- Flujo de Fluidos en TuberiasДокумент8 страницFlujo de Fluidos en TuberiasHeyker GilОценок пока нет
- Variables de Control de CostosДокумент6 страницVariables de Control de CostosHeyker GilОценок пока нет
- Pensum Ingenieria GasДокумент1 страницаPensum Ingenieria GasHeyker GilОценок пока нет
- Simulaciones en Matlab, SimunlinkДокумент4 страницыSimulaciones en Matlab, SimunlinkHeyker GilОценок пока нет
- Trabajo Ing. SistemasДокумент6 страницTrabajo Ing. SistemasHeyker GilОценок пока нет
- Simulaciones en Matlab, SimunlinkДокумент4 страницыSimulaciones en Matlab, SimunlinkHeyker GilОценок пока нет
- Industrial Procceses On MatlabДокумент6 страницIndustrial Procceses On MatlabHeyker GilОценок пока нет
- Gas NaturalДокумент47 страницGas NaturalbetoariasОценок пока нет
- Contenido de La Tesis de Levantamiento Artificial Por GasДокумент3 страницыContenido de La Tesis de Levantamiento Artificial Por GasHeyker GilОценок пока нет
- Planificacion ProyectoДокумент6 страницPlanificacion ProyectoHeyker GilОценок пока нет
- Bloque Viajero y Bloque CoronaДокумент3 страницыBloque Viajero y Bloque CoronaStefanny Rocha50% (2)
- Formulario Ciencias de Los MaterialesДокумент1 страницаFormulario Ciencias de Los MaterialesHeyker GilОценок пока нет
- Guaya FinaДокумент8 страницGuaya FinaHeyker GilОценок пока нет
- Formulario Ciencias de Los MaterialesДокумент1 страницаFormulario Ciencias de Los MaterialesHeyker GilОценок пока нет
- Tecnologia DIALДокумент2 страницыTecnologia DIALHeyker GilОценок пока нет
- Calculo Diferencial 1Документ1 страницаCalculo Diferencial 1Heyker GilОценок пока нет
- Informe de Pasantia GasДокумент117 страницInforme de Pasantia GasEnrique Javier Peraza LinaresОценок пока нет
- Natural Ez AДокумент11 страницNatural Ez AHeyker GilОценок пока нет
- A Pen DiceДокумент105 страницA Pen DicejuanelmaldiniОценок пока нет
- MagnetismoДокумент8 страницMagnetismoHeyker GilОценок пока нет
- 14 Consejos para Un TesistaДокумент4 страницы14 Consejos para Un TesistaHeyker GilОценок пока нет
- Procedimiento de Ajuste Del Compensador de Presion y FlujoДокумент3 страницыProcedimiento de Ajuste Del Compensador de Presion y FlujoEsteban ÁlvarezОценок пока нет
- Marco TeoricoДокумент9 страницMarco TeoricoCristhian ChavezОценок пока нет
- Maquinas AgotamientoДокумент16 страницMaquinas AgotamientoLeonel TafureОценок пока нет
- Informe 5 y 6 MecaДокумент20 страницInforme 5 y 6 Mecajeferson jeronimo encarnacionОценок пока нет
- Diapositivas BCPДокумент17 страницDiapositivas BCPBrigitte CapellaОценок пока нет
- Gestion CoolДокумент14 страницGestion CoolWILLIAM FERNANDO PARRA ROJASОценок пока нет
- Fuentes Superficiales Subsuperficiales y Subterraneas.Документ19 страницFuentes Superficiales Subsuperficiales y Subterraneas.Ricardo Alexis Castro Chavez100% (1)
- Bomba Centrifuga A Velocidad ConstanteДокумент11 страницBomba Centrifuga A Velocidad ConstanteJuliana Peña Gómez100% (1)
- Tapones Diesel BentonitaДокумент9 страницTapones Diesel BentonitaMario Avalos SalazarОценок пока нет
- Sistema Térmico y ClasificacionДокумент14 страницSistema Térmico y ClasificacionAnonymous QVTK2cw7Оценок пока нет
- Curso Didactico de Guaya FinaДокумент83 страницыCurso Didactico de Guaya Finaleris100% (1)
- Procedimiento de Mezclado en Camiones HormigonerasДокумент4 страницыProcedimiento de Mezclado en Camiones HormigonerasFranz Jhonatan Hilares AlvarezОценок пока нет
- Perforacion de Pozo en Oruro Bolivia Parte 2Документ6 страницPerforacion de Pozo en Oruro Bolivia Parte 2Luis Chino SarsuriОценок пока нет
- ELECTROHIDRAULICAДокумент12 страницELECTROHIDRAULICAUn Tal Josue80% (5)
- 12 Linea de ImpulsionДокумент45 страниц12 Linea de ImpulsionDaniel Parra BailónОценок пока нет
- Operator's Instructions SmartROC D65Документ168 страницOperator's Instructions SmartROC D65Luis Araya100% (5)
- Informe de Produccion de Bicarbonato de Sodio. Grupo 4Документ42 страницыInforme de Produccion de Bicarbonato de Sodio. Grupo 4LOZANO GUTIERREZ INGRID STACYОценок пока нет
- Exposicion de Recuperacion SecundariaДокумент12 страницExposicion de Recuperacion SecundariaChristopher De la CruzОценок пока нет
- Sistema Hidraulico ABSДокумент15 страницSistema Hidraulico ABSJose Daniel De la CruzОценок пока нет
- Ejempl2 PDFДокумент263 страницыEjempl2 PDFJheremy VerdeОценок пока нет
- Afinamiento de Motores Diesel Tr1Документ13 страницAfinamiento de Motores Diesel Tr1Luis Farfan Lara100% (2)
- Depto. Proy. Superv. Resid.: Pemex Exploración Y Producción Descripción Del ProcesoДокумент11 страницDepto. Proy. Superv. Resid.: Pemex Exploración Y Producción Descripción Del ProcesoFernando RomoОценок пока нет
- 02 Memoria Descriptiva Plaza ChuquingaДокумент16 страниц02 Memoria Descriptiva Plaza ChuquingaJC RoussОценок пока нет
- Clasificación de Los ReservoriosДокумент3 страницыClasificación de Los ReservoriosAnonymous 0f8vw93lОценок пока нет
- Bombeo de Agua PotableДокумент6 страницBombeo de Agua PotableMarco Esteban ZeasОценок пока нет
- Informe I Bomba CentrífugaДокумент15 страницInforme I Bomba CentrífugaDaniel VergaraОценок пока нет
- Trabajo Ricardo Ccoyure v2500Документ11 страницTrabajo Ricardo Ccoyure v2500Jose Luis Vasquez0% (1)
- Presiones Ing PetroleraДокумент7 страницPresiones Ing Petrolerakaren50% (2)
- Coca CorregidoДокумент4 страницыCoca CorregidoVeronica CaizaОценок пока нет
- Bombas de RecirculaciónДокумент1 страницаBombas de RecirculaciónEdward AburtoОценок пока нет