Вам также может понравиться
- Octree and BSPTREE From FoleyДокумент8 страницOctree and BSPTREE From FoleyVivekGargОценок пока нет
- Lecture 1Документ24 страницыLecture 1VivekGargОценок пока нет
- Priority QueuesДокумент13 страницPriority QueuesVivekGargОценок пока нет
- 3DTransformations 07 10 2014 PDFДокумент29 страниц3DTransformations 07 10 2014 PDFVivekGargОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Legend of GuavaДокумент4 страницыLegend of GuavaRoem LeymaОценок пока нет
- Developing The Marketing Mix: Notre Dame of Jaro IncДокумент3 страницыDeveloping The Marketing Mix: Notre Dame of Jaro IncVia Terrado CañedaОценок пока нет
- Sample Front Desk Receptionist ResumeДокумент5 страницSample Front Desk Receptionist ResumeReyvie FabroОценок пока нет
- UTS - Comparative Literature - Indah Savitri - S1 Sastra Inggris - 101201001Документ6 страницUTS - Comparative Literature - Indah Savitri - S1 Sastra Inggris - 101201001indahcantik1904Оценок пока нет
- Court Testimony-WpsДокумент3 страницыCourt Testimony-WpsCrisanto HernandezОценок пока нет
- Productivity in Indian Sugar IndustryДокумент17 страницProductivity in Indian Sugar Industryshahil_4uОценок пока нет
- 01 Particle Sizing by Laser DifractionДокумент145 страниц01 Particle Sizing by Laser DifractionPramesvara NaoriОценок пока нет
- Ductile Brittle TransitionДокумент7 страницDuctile Brittle TransitionAndrea CalderaОценок пока нет
- Experiment 5 ADHAVANДокумент29 страницExperiment 5 ADHAVANManoj Raj RajОценок пока нет
- DU - BSC (H) CS BookletДокумент121 страницаDU - BSC (H) CS BookletNagendra DuhanОценок пока нет
- Limitations For The Study: Celebrity ViewsДокумент3 страницыLimitations For The Study: Celebrity ViewsPakaya100% (2)
- Rangkuman Corporate GovernanceДокумент21 страницаRangkuman Corporate GovernanceAlissa JanssensОценок пока нет
- Global Trustworthiness 2022 ReportДокумент32 страницыGlobal Trustworthiness 2022 ReportCaroline PimentelОценок пока нет
- Cambridge Intl. Sr. Sec. School Class: X, Preboard Examination-1 Subject: Mathematics Time Allowed: 3Hrs. M.M: 80Документ5 страницCambridge Intl. Sr. Sec. School Class: X, Preboard Examination-1 Subject: Mathematics Time Allowed: 3Hrs. M.M: 80Suyash PandeyОценок пока нет
- Review Unit 10 Test CHP 17Документ13 страницReview Unit 10 Test CHP 17TechnoKittyKittyОценок пока нет
- Republic v. EncelanДокумент2 страницыRepublic v. EncelanKyla ReyesОценок пока нет
- 1000 Electronic Devices & Circuits MCQsДокумент467 страниц1000 Electronic Devices & Circuits MCQskibrom atsbha67% (3)
- Practical and Mathematical Skills BookletДокумент30 страницPractical and Mathematical Skills BookletZarqaYasminОценок пока нет
- New Intelligent AVR Controller Based On Particle Swarm Optimization For Transient Stability EnhancementДокумент6 страницNew Intelligent AVR Controller Based On Particle Swarm Optimization For Transient Stability EnhancementnaghamОценок пока нет
- Assignment Brief Starting A Small BusinessДокумент3 страницыAssignment Brief Starting A Small BusinessFaraz0% (1)
- A Systematic Literature Review of Empirical Research On ChatGPT in EducationДокумент23 страницыA Systematic Literature Review of Empirical Research On ChatGPT in Educationgraciduttra.profОценок пока нет
- Miranda V AgДокумент3 страницыMiranda V AgCARLO JOSE BACTOLОценок пока нет
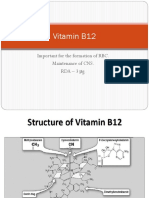
- Vitamin B12: Essential for RBC Formation and CNS MaintenanceДокумент19 страницVitamin B12: Essential for RBC Formation and CNS MaintenanceHari PrasathОценок пока нет
- Understanding EndogeneityДокумент25 страницUnderstanding EndogeneityagustinusОценок пока нет
- Course Outline Physics EducationДокумент3 страницыCourse Outline Physics EducationTrisna HawuОценок пока нет
- Identifying States of Matter LessonДокумент2 страницыIdentifying States of Matter LessonRaul OrcigaОценок пока нет
- 02 Cost of Capital QBДокумент26 страниц02 Cost of Capital QBAbhi JayakumarОценок пока нет
- Reviews: Bariatric and Metabolic Surgery: A Shift in Eligibility and Success CriteriaДокумент13 страницReviews: Bariatric and Metabolic Surgery: A Shift in Eligibility and Success CriteriaJulia SCОценок пока нет
- Grammar activities and exercisesДокумент29 страницGrammar activities and exercisesElena NicolauОценок пока нет