Вам также может понравиться
- Formation Efficacité Énergétique Dans L'industrie PDFДокумент168 страницFormation Efficacité Énergétique Dans L'industrie PDFArih Fadi100% (2)
- Chaudieres A Vapeur A CombustibleДокумент9 страницChaudieres A Vapeur A Combustiblemeriem944Оценок пока нет
- Vibrations PDFДокумент6 страницVibrations PDFfitasmounirОценок пока нет
- Ms GM BenchaibДокумент105 страницMs GM BenchaibfitasmounirОценок пока нет
- Brochure Technique - Chaudieres A VapeurДокумент28 страницBrochure Technique - Chaudieres A VapeurNicole LiОценок пока нет
- Diallo Salé Djibrine Gombo AdefДокумент113 страницDiallo Salé Djibrine Gombo AdeffitasmounirОценок пока нет
- MS Hyd Hachemi PDFДокумент119 страницMS Hyd Hachemi PDFmajdoubОценок пока нет
- 2014 AbdelhakOulmaneДокумент232 страницы2014 AbdelhakOulmanefitasmounirОценок пока нет
- Cours Commande Programmable Tome 2 - 2014 v4.7 PDFДокумент107 страницCours Commande Programmable Tome 2 - 2014 v4.7 PDFfitasmounir100% (1)
- Équilibrage Des Solides Tournants Profs PDFДокумент8 страницÉquilibrage Des Solides Tournants Profs PDFfitasmounirОценок пока нет
- Product Data Sheet 475 Field Communicator Ams FR 105004 PDFДокумент9 страницProduct Data Sheet 475 Field Communicator Ams FR 105004 PDFfitasmounirОценок пока нет
- L'engagement Environnemental Des Industriels Du Secteur Petrolier Et Gazier OffshoreДокумент7 страницL'engagement Environnemental Des Industriels Du Secteur Petrolier Et Gazier OffshorefitasmounirОценок пока нет
- FA248 - 1 ETIC - Telem S7-1200 Ou S7-1500 PDFДокумент11 страницFA248 - 1 ETIC - Telem S7-1200 Ou S7-1500 PDFfitasmounirОценок пока нет
- 2006 Bookmatter TechniqueDÉquilibrageДокумент16 страниц2006 Bookmatter TechniqueDÉquilibrageAekDzLaiОценок пока нет
- Chapitre 1Документ19 страницChapitre 1sdvdddОценок пока нет
- POSTER Master 2 2017 PDFДокумент1 страницаPOSTER Master 2 2017 PDFfitasmounirОценок пока нет
- 6 Asservissement ArduinoДокумент13 страниц6 Asservissement Arduinoladabd2100% (1)
- Systèmes Et AsservissementsДокумент453 страницыSystèmes Et AsservissementsfitasmounirОценок пока нет
- Automatique LineaireДокумент5 страницAutomatique LineaireAhmed HamadaОценок пока нет
- Équilibrage Des Solides Tournants Profs PDFДокумент8 страницÉquilibrage Des Solides Tournants Profs PDFfitasmounirОценок пока нет
- Sa1-Systemes Asservis - NotionsДокумент4 страницыSa1-Systemes Asservis - NotionsMohammed ChaabateОценок пока нет
- Représentations D'état Linéaires Des Systèmes MonovariablesДокумент167 страницReprésentations D'état Linéaires Des Systèmes MonovariablesAymen ChaairaОценок пока нет
- Cours de Systemes AsservisДокумент82 страницыCours de Systemes Asserviselectroblida86% (7)
- Auto Ma Ti Que Continue 2003Документ32 страницыAuto Ma Ti Que Continue 2003hakkayОценок пока нет
- Inf00 wp003 - FR PДокумент16 страницInf00 wp003 - FR PfitasmounirОценок пока нет
- Cnet So001 - FR PДокумент32 страницыCnet So001 - FR PfitasmounirОценок пока нет
- 1789 sg001 - FR PДокумент58 страниц1789 sg001 - FR PfitasmounirОценок пока нет
- Asservissement MCCДокумент37 страницAsservissement MCCsmail4everОценок пока нет
- 2711 Um003 - FR PДокумент21 страница2711 Um003 - FR PfitasmounirОценок пока нет
- Modele Gratuit de Suivi StockДокумент16 страницModele Gratuit de Suivi StockABDOURAHMANE BERETEОценок пока нет
- COCOMOДокумент28 страницCOCOMOmerde12Оценок пока нет
- FNAC AnalyseДокумент9 страницFNAC Analyseboonaertb100% (2)
- 11-Comment Tuer PompeДокумент15 страниц11-Comment Tuer Pompelee marvin BilongОценок пока нет
- Geometrie Analytique de L Espace Corrige Serie D Exercices 1Документ6 страницGeometrie Analytique de L Espace Corrige Serie D Exercices 1Mohamed WidadОценок пока нет
- Compendium 2008 FДокумент6 страницCompendium 2008 Fyves2022sahaОценок пока нет
- Presse Cours 1Документ2 страницыPresse Cours 1Hélène HofbauerОценок пока нет
- A-TESE 1976 - PesquisaДокумент400 страницA-TESE 1976 - PesquisaBelchiorCosta0% (1)
- Recyclage Et Valorisation de Sédiments Fins de Dragage À Usage de Matériaux RoutiersДокумент11 страницRecyclage Et Valorisation de Sédiments Fins de Dragage À Usage de Matériaux RoutiersSaid MOHAFIDОценок пока нет
- Mode Operatoire Access 2016 Page 1Документ5 страницMode Operatoire Access 2016 Page 1amoucha sarfdaОценок пока нет
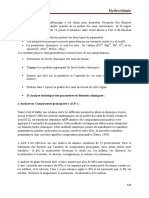
- 16chapitre Hydrochimie1Документ20 страниц16chapitre Hydrochimie1Hayat MegdoudОценок пока нет
- Instructions de CréationДокумент4 страницыInstructions de CréationMimi DzОценок пока нет
- L2 - B G 1" Examen Écrit 2 Session: PARTIE BIOLOGIE MOLECULAIRE (Note Sur 20 Durée Conseillée: 45 MN)Документ3 страницыL2 - B G 1" Examen Écrit 2 Session: PARTIE BIOLOGIE MOLECULAIRE (Note Sur 20 Durée Conseillée: 45 MN)Mohamed SdikОценок пока нет
- FST Equipes Oct 2018Документ4 страницыFST Equipes Oct 2018Mohamed HnaОценок пока нет
- LACROIXCity Sogexi FestilumДокумент2 страницыLACROIXCity Sogexi FestilumSchwobОценок пока нет
- A QCM Système Nationale de Santé - CS - SROSДокумент112 страницA QCM Système Nationale de Santé - CS - SROSasmae chadli100% (5)
- Memoire & Resume GODRIX BastienДокумент116 страницMemoire & Resume GODRIX BastienRiadh A.HОценок пока нет
- Portail SNCF ManagerisДокумент5 страницPortail SNCF ManagerislamiamaziliОценок пока нет
- Modification de La Radio Yaesu FT80CДокумент28 страницModification de La Radio Yaesu FT80CHerintsalamaОценок пока нет
- 2016 17.TD - td1 4.sujet Copie - InfoДокумент22 страницы2016 17.TD - td1 4.sujet Copie - Infofifi foufouОценок пока нет
- Amélioration Des Plantes 2022Документ15 страницAmélioration Des Plantes 2022Brahim GharbiОценок пока нет
- Memoire DagnicourtДокумент134 страницыMemoire DagnicourtRoc Elyion ThomasОценок пока нет
- Contexte de LДокумент3 страницыContexte de LKonan Richard Kouassi100% (1)
- Fondements Psycho-Sociaux de La Définition Des Méssages Éducatifs - S3 - 19Документ30 страницFondements Psycho-Sociaux de La Définition Des Méssages Éducatifs - S3 - 19Mohamed TliliОценок пока нет
- Examen National Maths Sciences Et Technologies 2017 Normale SujetДокумент4 страницыExamen National Maths Sciences Et Technologies 2017 Normale Sujetimad haddiouiОценок пока нет
- Caifanes - Afuera (G2)Документ4 страницыCaifanes - Afuera (G2)Víctor IbarraОценок пока нет
- PDF Le Grafcet Cours Exercices Corriges - TextmarkДокумент186 страницPDF Le Grafcet Cours Exercices Corriges - Textmarkousmane kaneОценок пока нет
- La Scence Et La CriseДокумент8 страницLa Scence Et La CriseNicolas VantisОценок пока нет
- ApacheДокумент31 страницаApacheAbdelmoumene BoulghalghОценок пока нет
- Analyse Urbaine MiramarДокумент13 страницAnalyse Urbaine MiramarSkruuu LyОценок пока нет