Вам также может понравиться
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Simulation LabДокумент17 страницSimulation LabARVINDОценок пока нет
- Electrical Simulation Lab ManuvalДокумент36 страницElectrical Simulation Lab ManuvalsaikiranraОценок пока нет
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1От EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Рейтинг: 4.5 из 5 звезд4.5/5 (3)
- Simulation of A Ac Voltage Controller With Various Loads: G T T X yДокумент3 страницыSimulation of A Ac Voltage Controller With Various Loads: G T T X yKarthik SsnongoleОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Simlab 2Документ85 страницSimlab 2Wilson BotchaОценок пока нет
- 110 Waveform Generator Projects for the Home ConstructorОт Everand110 Waveform Generator Projects for the Home ConstructorРейтинг: 4 из 5 звезд4/5 (1)
- Simulation ManualДокумент60 страницSimulation ManualPhani ramОценок пока нет
- ESD Lab ManualДокумент30 страницESD Lab ManualJegadeeshan MeganathanОценок пока нет
- Date: 17/7/2008: RLC Response of Step InputДокумент32 страницыDate: 17/7/2008: RLC Response of Step InputARVINDОценок пока нет
- Pspice Tutorial AcДокумент89 страницPspice Tutorial AcZadziorОценок пока нет
- Single Power Supply Synchronous PWM Controller: Description FeaturesДокумент17 страницSingle Power Supply Synchronous PWM Controller: Description FeaturesIonel CociasОценок пока нет
- Simulation of A Buck Chopper and Resonant Pulse Commutation CircuitДокумент2 страницыSimulation of A Buck Chopper and Resonant Pulse Commutation CircuitKarthik SsnongoleОценок пока нет
- ECA-Labmanual BookДокумент56 страницECA-Labmanual BookL Hari Venkatesh100% (2)
- LMC555 CMOS Timer: General Description FeaturesДокумент10 страницLMC555 CMOS Timer: General Description FeaturesJeremy ObriotОценок пока нет
- Application Note AN6016: LCD Backlight Inverter Drive IC (FAN7311)Документ18 страницApplication Note AN6016: LCD Backlight Inverter Drive IC (FAN7311)Osama YaseenОценок пока нет
- Analog Integrated Circuits: LAB FileДокумент27 страницAnalog Integrated Circuits: LAB FileSarthak PalОценок пока нет
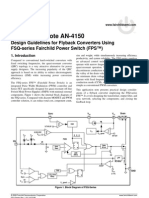
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Документ16 страницApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaОценок пока нет
- LMC555 CMOS Timer: General Description FeaturesДокумент12 страницLMC555 CMOS Timer: General Description FeaturesNicolas FontanaОценок пока нет
- VLSI Lab ManualДокумент48 страницVLSI Lab ManualMohib KhanОценок пока нет
- Index: S.No. Date Title Sign RemarkДокумент19 страницIndex: S.No. Date Title Sign RemarkRadhika KalawatОценок пока нет
- EXP1Документ3 страницыEXP1Zahedul HoqueОценок пока нет
- Lic Pspice File NSIT V SemДокумент20 страницLic Pspice File NSIT V SemHarshul SoniОценок пока нет
- Ngspice TutorialДокумент5 страницNgspice TutorialsujaybdesaiОценок пока нет
- PDC Lab ManualДокумент71 страницаPDC Lab Manualswapnadeepika100% (3)
- Fold-Cascode OPДокумент11 страницFold-Cascode OPLinAm AmatariyakulОценок пока нет
- Ece Software ReportДокумент38 страницEce Software ReportWINORLOSEОценок пока нет
- Simulation of A 1phase Inverter With PWM Controller: Diode Model Parameters Are Sat CurrentДокумент3 страницыSimulation of A 1phase Inverter With PWM Controller: Diode Model Parameters Are Sat CurrentKarthik SsnongoleОценок пока нет
- Lab - Experiment - 1-3Документ11 страницLab - Experiment - 1-3Md. Sadique SheikhОценок пока нет
- 29ltd-st 29wx-st SM pg12 pg34Документ23 страницы29ltd-st 29wx-st SM pg12 pg34Jesus Antonio Gonzalez QuinteroОценок пока нет
- Vlsi Device Modelling ENP 302 Assignment-04Документ13 страницVlsi Device Modelling ENP 302 Assignment-04BT19ECE067 MiteshОценок пока нет
- Lic Lab File: Submitted By: S.Srivathsan 526/IC/11Документ19 страницLic Lab File: Submitted By: S.Srivathsan 526/IC/11Sri VathsanОценок пока нет
- Sla 7027Документ8 страницSla 7027manuals2011Оценок пока нет
- Experiment No. 05: Simulate I-V Characteristics of PN and Zener Diode Using LtspiceДокумент10 страницExperiment No. 05: Simulate I-V Characteristics of PN and Zener Diode Using LtspicesindhuОценок пока нет
- List of Experiments: Ic Applications Lab Minimum Twelve Experiments To Be ConductedДокумент6 страницList of Experiments: Ic Applications Lab Minimum Twelve Experiments To Be ConductedAmy OliverОценок пока нет
- Ece - Mits.ac - in - Electronic Circuit Analysis Lab ManualДокумент51 страницаEce - Mits.ac - in - Electronic Circuit Analysis Lab ManualDileep KumarОценок пока нет
- Datasheet Fairchild UC3843Документ7 страницDatasheet Fairchild UC3843Tina JohnsonОценок пока нет
- Fundamentals of Electrical Engineering 4 Lab 4 - MOSFET AmplifierДокумент22 страницыFundamentals of Electrical Engineering 4 Lab 4 - MOSFET AmplifierGerson SantosОценок пока нет
- Design of Two Stage CMOS Op-Amp With Low Power and High Slew RateДокумент5 страницDesign of Two Stage CMOS Op-Amp With Low Power and High Slew RatepariОценок пока нет
- Chang 09 Med PrimДокумент6 страницChang 09 Med PrimSuselleОценок пока нет
- Semiconductor Device Simulation & Process Modelling LabДокумент19 страницSemiconductor Device Simulation & Process Modelling LabAasif KhanОценок пока нет
- I. Instructional Objectives: D S G D GДокумент4 страницыI. Instructional Objectives: D S G D Gcokelat_kОценок пока нет
- Simulation of Electronic Circuits Using Pspice: (Linear Integrated Circuits Lab)Документ30 страницSimulation of Electronic Circuits Using Pspice: (Linear Integrated Circuits Lab)mohit kumar saxenaОценок пока нет
- Power Electronics Lab MannualДокумент12 страницPower Electronics Lab MannualAnupam Adarsh KumarОценок пока нет
- Eee312 Eee282 Lab7 Spring2015Документ6 страницEee312 Eee282 Lab7 Spring2015vognarОценок пока нет
- Electrical Simulation Lab: EEE 454 IV Sem EN BranchДокумент28 страницElectrical Simulation Lab: EEE 454 IV Sem EN Branchsachin10dulkarОценок пока нет
- An02 001Документ7 страницAn02 001Xuanwu KangОценок пока нет
- Op Amp TesterДокумент6 страницOp Amp TesterEeshan UpadhyayОценок пока нет
- Lab 1 Power SupplyДокумент7 страницLab 1 Power SupplyKatherine YenОценок пока нет
- Samsung Plasma Training ManualДокумент57 страницSamsung Plasma Training ManualevaristoОценок пока нет
- Cad Exp ManualДокумент23 страницыCad Exp ManualRavindra KumarОценок пока нет
- Samsung Plasma Training ManualДокумент57 страницSamsung Plasma Training ManualDamiao100% (1)
- PE-Lab Manual-3 PDFДокумент49 страницPE-Lab Manual-3 PDFGECM85Оценок пока нет
- PDC Lab ManualДокумент33 страницыPDC Lab ManualBhanu SriОценок пока нет
- Electronic Circuits - II Lab ManualДокумент26 страницElectronic Circuits - II Lab Manualbalabasker100% (1)
- U217BДокумент11 страницU217BAnonymous JR1LSmN0sОценок пока нет
- Pspice Simulation of Power Electronics Circuits: Part 3 of Extra Material For Use WithДокумент26 страницPspice Simulation of Power Electronics Circuits: Part 3 of Extra Material For Use WithawemetalОценок пока нет
- CN0350Документ7 страницCN0350Narayan ApteОценок пока нет
- 200 Prep Questions: Downloads/200 - PMP - Sample - Questions PDFДокумент1 страница200 Prep Questions: Downloads/200 - PMP - Sample - Questions PDFGowtham SpОценок пока нет
- Very Large Scale IntegrationДокумент3 страницыVery Large Scale IntegrationGowtham SpОценок пока нет
- Fusion - WikipediaДокумент3 страницыFusion - WikipediaGowtham SpОценок пока нет
- Spanish Language Influences On Written English: Betty Rizzo and Santiago VillafaneДокумент10 страницSpanish Language Influences On Written English: Betty Rizzo and Santiago VillafaneGowtham SpОценок пока нет
- Semiconductor - WikipediaДокумент2 страницыSemiconductor - WikipediaGowtham SpОценок пока нет
- Diode - WikipediaДокумент3 страницыDiode - WikipediaGowtham SpОценок пока нет
- Lambda-CDM Model - WikipediaДокумент2 страницыLambda-CDM Model - WikipediaGowtham SpОценок пока нет
- Hubble Space Telescope - WikipediaДокумент3 страницыHubble Space Telescope - WikipediaGowtham SpОценок пока нет
- Comparative Study On Low-Power High-Performance Standard-Cell Flip-FlopsДокумент9 страницComparative Study On Low-Power High-Performance Standard-Cell Flip-FlopsGowtham SpОценок пока нет
- Planck Time - WikipediaДокумент2 страницыPlanck Time - WikipediaGowtham SpОценок пока нет
- శ్రీ గురు చరిత్ర - రెండవ భాగంДокумент36 страницశ్రీ గురు చరిత్ర - రెండవ భాగంరసజ్ఞОценок пока нет
- Low-Power and Area-Efficient Shift Register Using Pulsed LatchДокумент5 страницLow-Power and Area-Efficient Shift Register Using Pulsed LatchGowtham SpОценок пока нет
- Nanomaterials For Nonlinear Optical (Nlo) Applications: A ReviewДокумент11 страницNanomaterials For Nonlinear Optical (Nlo) Applications: A ReviewGowtham SpОценок пока нет
- 22.doc Front EndДокумент58 страниц22.doc Front EndGowtham SpОценок пока нет
- Low-Power and Area-Efficient Shift Register Using Pulsed LatchesДокумент16 страницLow-Power and Area-Efficient Shift Register Using Pulsed LatchesGowtham SpОценок пока нет
- Analysis of Low-Power and Area-Efficient Shift Registers Using Pulsed LatchДокумент5 страницAnalysis of Low-Power and Area-Efficient Shift Registers Using Pulsed LatchGowtham SpОценок пока нет
- Pocket Clamp Digital Multimeter Instruction ManualДокумент13 страницPocket Clamp Digital Multimeter Instruction Manualnod69ass100% (1)
- Tepper - Basic Radio Repair 1-2Документ224 страницыTepper - Basic Radio Repair 1-2SamKari100% (2)
- Fluke 87V Full Service Manual With Schematic and Electrical Parts List PDFДокумент50 страницFluke 87V Full Service Manual With Schematic and Electrical Parts List PDFDanielVictorОценок пока нет
- Sharp 25KM100 TV Service ManualДокумент48 страницSharp 25KM100 TV Service ManualferdialvascribdОценок пока нет
- Voltage Divider ExperimentДокумент9 страницVoltage Divider ExperimentJAIОценок пока нет
- Users Manual: MegohmmeterДокумент41 страницаUsers Manual: MegohmmeterFelipe Ruben AlejoОценок пока нет
- C512 Manual PDFДокумент93 страницыC512 Manual PDFreinaldoОценок пока нет
- Schneider Electric LT6 Protection Intelligence Combined Catalog 9110CT9702Документ24 страницыSchneider Electric LT6 Protection Intelligence Combined Catalog 9110CT9702Igidio PedroОценок пока нет
- Resistance Meter - RM3544 - RM3548Документ12 страницResistance Meter - RM3544 - RM3548Rudianto LumbantoruanОценок пока нет
- HEF4069UB: 1. General DescriptionДокумент17 страницHEF4069UB: 1. General DescriptionJoel PalzaОценок пока нет
- Design and Construction of Audio Power Amplifier Olumide Andrew AFOLAYANДокумент6 страницDesign and Construction of Audio Power Amplifier Olumide Andrew AFOLAYANAaraav Ilyasshussain30% (1)
- Capacitance and Inductance Measurements Using An Oscilloscope and A Function GeneratorДокумент9 страницCapacitance and Inductance Measurements Using An Oscilloscope and A Function Generatoralex castroОценок пока нет
- Lab 1Документ17 страницLab 1WaelBazziОценок пока нет
- Gek 49827a PDFДокумент50 страницGek 49827a PDFManuel MazariegosОценок пока нет
- Kes 200Документ22 страницыKes 200Edwin MoralitosОценок пока нет
- Twde0638 PDFДокумент314 страницTwde0638 PDFJhair Amasifuen100% (1)
- Silicon Chip 11 PDFДокумент100 страницSilicon Chip 11 PDFcristi25100% (2)
- The OscilloscopeДокумент5 страницThe OscilloscopeSadiq IdrisОценок пока нет
- Technical Information Letter: Energy Services Engineering Product Service TIL 1607Документ6 страницTechnical Information Letter: Energy Services Engineering Product Service TIL 1607Hashim BukhariОценок пока нет
- PH, Orp, CD, TDS, Do, Salt Meter: Operation ManualДокумент53 страницыPH, Orp, CD, TDS, Do, Salt Meter: Operation Manualalexis villalobosОценок пока нет
- Mixed Signal Oscilloscopes: MSO2000B Series, DPO2000B Series DatasheetДокумент17 страницMixed Signal Oscilloscopes: MSO2000B Series, DPO2000B Series DatasheetDavidОценок пока нет
- Eddy Current Testing LevelII Questions and AnswersДокумент6 страницEddy Current Testing LevelII Questions and AnswersStu Sutcliffe67% (3)
- Vanguard 37 Efi Repair ManualДокумент150 страницVanguard 37 Efi Repair ManualFrancis Kengne0% (1)
- User and Service Guide: 1144A Active ProbeДокумент20 страницUser and Service Guide: 1144A Active ProbeRuggero RamponeОценок пока нет
- Sr. No. Equipment Equipment ID Location Calibration Due DateДокумент16 страницSr. No. Equipment Equipment ID Location Calibration Due DateGURIОценок пока нет
- N. Bacalso Avenue, Cebu City: Cebu Institute of Technology - UniversityДокумент15 страницN. Bacalso Avenue, Cebu City: Cebu Institute of Technology - UniversityTreyes RobertОценок пока нет
- Fuse Catalog Nte-ElectronicsДокумент32 страницыFuse Catalog Nte-ElectronicsSamir AbauОценок пока нет
- Configuration H MarlinДокумент42 страницыConfiguration H MarlinJose Pons CampsОценок пока нет
- Oscilloscope HM1507-: Manual - Handbuch - ManuelДокумент40 страницOscilloscope HM1507-: Manual - Handbuch - ManuelNaida HadžiibrahimovićОценок пока нет
- Fluke 99BДокумент14 страницFluke 99BguillermoОценок пока нет
- Dumbing Us Down: The Hidden Curriculum of Compulsory SchoolingОт EverandDumbing Us Down: The Hidden Curriculum of Compulsory SchoolingРейтинг: 4.5 из 5 звезд4.5/5 (497)
- How to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipОт EverandHow to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipРейтинг: 4.5 из 5 звезд4.5/5 (1135)
- Weapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingОт EverandWeapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingРейтинг: 4.5 из 5 звезд4.5/5 (149)
- Summary: Trading in the Zone: Trading in the Zone: Master the Market with Confidence, Discipline, and a Winning Attitude by Mark Douglas: Key Takeaways, Summary & AnalysisОт EverandSummary: Trading in the Zone: Trading in the Zone: Master the Market with Confidence, Discipline, and a Winning Attitude by Mark Douglas: Key Takeaways, Summary & AnalysisРейтинг: 5 из 5 звезд5/5 (15)
- Summary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisОт EverandSummary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisРейтинг: 4.5 из 5 звезд4.5/5 (30)
- Stoicism The Art of Happiness: How the Stoic Philosophy Works, Living a Good Life, Finding Calm and Managing Your Emotions in a Turbulent World. New VersionОт EverandStoicism The Art of Happiness: How the Stoic Philosophy Works, Living a Good Life, Finding Calm and Managing Your Emotions in a Turbulent World. New VersionРейтинг: 5 из 5 звезд5/5 (51)
- The 16 Undeniable Laws of Communication: Apply Them and Make the Most of Your MessageОт EverandThe 16 Undeniable Laws of Communication: Apply Them and Make the Most of Your MessageРейтинг: 5 из 5 звезд5/5 (73)
- How to Improve English Speaking: How to Become a Confident and Fluent English SpeakerОт EverandHow to Improve English Speaking: How to Become a Confident and Fluent English SpeakerРейтинг: 4.5 из 5 звезд4.5/5 (56)
- Summary: Dotcom Secrets: The Underground Playbook for Growing Your Company Online with Sales Funnels by Russell Brunson: Key Takeaways, Summary & Analysis IncludedОт EverandSummary: Dotcom Secrets: The Underground Playbook for Growing Your Company Online with Sales Funnels by Russell Brunson: Key Takeaways, Summary & Analysis IncludedРейтинг: 5 из 5 звезд5/5 (2)
- Cynical Theories: How Activist Scholarship Made Everything about Race, Gender, and Identity―and Why This Harms EverybodyОт EverandCynical Theories: How Activist Scholarship Made Everything about Race, Gender, and Identity―and Why This Harms EverybodyРейтинг: 4.5 из 5 звезд4.5/5 (221)
- Learn Japanese - Level 1: Introduction to Japanese, Volume 1: Volume 1: Lessons 1-25От EverandLearn Japanese - Level 1: Introduction to Japanese, Volume 1: Volume 1: Lessons 1-25Рейтинг: 5 из 5 звезд5/5 (17)
- Summary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisОт EverandSummary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Summary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisОт EverandSummary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisРейтинг: 4.5 из 5 звезд4.5/5 (22)
- Rooted in Joy: Creating a Classroom Culture of Equity, Belonging, and CareОт EverandRooted in Joy: Creating a Classroom Culture of Equity, Belonging, and CareОценок пока нет
- Summary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisОт EverandSummary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisРейтинг: 5 из 5 звезд5/5 (3)
- Why Smart People Hurt: A Guide for the Bright, the Sensitive, and the CreativeОт EverandWhy Smart People Hurt: A Guide for the Bright, the Sensitive, and the CreativeРейтинг: 3.5 из 5 звезд3.5/5 (54)
- Make It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningОт EverandMake It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningРейтинг: 4.5 из 5 звезд4.5/5 (55)
- Follow your interests: This will make you feel better about yourself and what you can do.: inspiration and wisdom for achieving a fulfilling life.От EverandFollow your interests: This will make you feel better about yourself and what you can do.: inspiration and wisdom for achieving a fulfilling life.Оценок пока нет
- Little Soldiers: An American Boy, a Chinese School, and the Global Race to AchieveОт EverandLittle Soldiers: An American Boy, a Chinese School, and the Global Race to AchieveРейтинг: 4 из 5 звезд4/5 (25)
- Summary: Greenlights: by Matthew McConaughey: Key Takeaways, Summary & AnalysisОт EverandSummary: Greenlights: by Matthew McConaughey: Key Takeaways, Summary & AnalysisРейтинг: 4 из 5 звезд4/5 (6)
- Follow The Leader: A Collection Of The Best Lectures On LeadershipОт EverandFollow The Leader: A Collection Of The Best Lectures On LeadershipРейтинг: 5 из 5 звезд5/5 (122)
- Taking Charge of ADHD: The Complete, Authoritative Guide for ParentsОт EverandTaking Charge of ADHD: The Complete, Authoritative Guide for ParentsРейтинг: 4 из 5 звезд4/5 (17)
- Financial Feminist: Overcome the Patriarchy's Bullsh*t to Master Your Money and Build a Life You LoveОт EverandFinancial Feminist: Overcome the Patriarchy's Bullsh*t to Master Your Money and Build a Life You LoveРейтинг: 5 из 5 звезд5/5 (1)