Вам также может понравиться
- Labsheet 11Документ14 страницLabsheet 11TANMAY GOELОценок пока нет
- Shreeram Polytechnic, AiroliДокумент10 страницShreeram Polytechnic, AiroliPankit PanchalОценок пока нет
- Fib HeapsДокумент7 страницFib Heapsapi-3825559100% (1)
- Heap (Data Structure)Документ7 страницHeap (Data Structure)Andres R. BucheliОценок пока нет
- Chapter-8. HeapДокумент11 страницChapter-8. HeapQuazi Hasnat IrfanОценок пока нет
- Functionalpearl The Zipper: G Erard HuetДокумент6 страницFunctionalpearl The Zipper: G Erard HuetmoskvaxОценок пока нет
- Data Structutes Using C'Документ7 страницData Structutes Using C'Sumitavo NagОценок пока нет
- Heaps: Analysis of AlgorithmsДокумент27 страницHeaps: Analysis of AlgorithmsAsma SajidОценок пока нет
- CBS - DsaДокумент13 страницCBS - Dsavengai marbhanОценок пока нет
- TARJANДокумент20 страницTARJANTomiro YisajorОценок пока нет
- Data Structure (2marks)Документ9 страницData Structure (2marks)Akash SanjeevОценок пока нет
- Fibonacci Heaps Revisited: Haim Kaplan Robert E. Tarjan Uri ZwickДокумент14 страницFibonacci Heaps Revisited: Haim Kaplan Robert E. Tarjan Uri ZwickLEYDI DIANA CHOQUE SARMIENTOОценок пока нет
- Ads Unit IIIДокумент18 страницAds Unit IIIrajasekharv86Оценок пока нет
- Data Structures Lab Project: Implementation and Optimization of Some Lesser-Known BSTДокумент14 страницData Structures Lab Project: Implementation and Optimization of Some Lesser-Known BSTShreyash RautelaОценок пока нет
- Data Structure MaterialДокумент22 страницыData Structure Materialgani525Оценок пока нет
- Machine Learning and Pattern Recognition Week 8 Neural Net ArchitecturesДокумент3 страницыMachine Learning and Pattern Recognition Week 8 Neural Net ArchitectureszeliawillscumbergОценок пока нет
- Galperin93 Scapegoat TreesДокумент10 страницGalperin93 Scapegoat TreesMEGUELLATI Fahd MustaphaОценок пока нет
- The Violation Heap: A Relaxed Fibonacci-Like HeapДокумент10 страницThe Violation Heap: A Relaxed Fibonacci-Like HeapMaratha SainikОценок пока нет
- Fast and Memory Efficient Mining of Frequent Closed ItemsetsДокумент18 страницFast and Memory Efficient Mining of Frequent Closed Itemsetsrodda1Оценок пока нет
- C-3 (Dsa)Документ11 страницC-3 (Dsa)carryminati238Оценок пока нет
- Splay TreesДокумент44 страницыSplay TreesKwasi AwuahОценок пока нет
- Data Structural Bootstrapping, Linear Path Compression, and Catenable Heap Ordered Double Ended QueuesДокумент13 страницData Structural Bootstrapping, Linear Path Compression, and Catenable Heap Ordered Double Ended Queuesbrkak132Оценок пока нет
- DsMahiwaya PDFДокумент21 страницаDsMahiwaya PDFMahiwaymaОценок пока нет
- Comp 272 NotesДокумент26 страницComp 272 Notesqqq wweeew0% (1)
- Sample Q & AДокумент11 страницSample Q & AwanjabaОценок пока нет
- Support Vector Data Description Applied To Machine Vibration AnalysisДокумент8 страницSupport Vector Data Description Applied To Machine Vibration Analysisthabiso87Оценок пока нет
- Self Balancing Binary Search TreeДокумент4 страницыSelf Balancing Binary Search Treethe_swagmasterОценок пока нет
- Unit 1 Ads NewДокумент50 страницUnit 1 Ads NewsirishaksnlpОценок пока нет
- Data Structures SampleДокумент8 страницData Structures SampleHebrew JohnsonОценок пока нет
- Comprehensive Viva VoceДокумент168 страницComprehensive Viva VoceDHANASEENUVASAN DОценок пока нет
- Ques 1:explain Complexity of An Algorithm in Detain?: StringsДокумент4 страницыQues 1:explain Complexity of An Algorithm in Detain?: StringsPavi DhillonОценок пока нет
- Summarizing Sequential Data With Closed Partial OrdersДокумент12 страницSummarizing Sequential Data With Closed Partial OrdersShayekh Ahmed Ibn HassanОценок пока нет
- NGDMA05Документ43 страницыNGDMA05Wafa'a AbdoIslamОценок пока нет
- .4.2 Optimal Solution For TSP Using Branch and Bound: PrincipleДокумент14 страниц.4.2 Optimal Solution For TSP Using Branch and Bound: Principleleeza_goyalОценок пока нет
- DS TheoryДокумент7 страницDS TheorywarikadwaitОценок пока нет
- Data Structures: Linked ListДокумент7 страницData Structures: Linked ListMeenal Kataria PanjwaniОценок пока нет
- DSA Self Placed: GeeksforgeeksДокумент20 страницDSA Self Placed: GeeksforgeeksMohd AmirОценок пока нет
- Priority QueuesДокумент6 страницPriority QueuesGeorge PeckОценок пока нет
- Segment Tree PDFДокумент5 страницSegment Tree PDFNeeraj SharmaОценок пока нет
- Heaps, Heapsort and Priority Queues: No Gaps in It. The Last Two Conditions Give A Heap A Weak Amount of OrderДокумент24 страницыHeaps, Heapsort and Priority Queues: No Gaps in It. The Last Two Conditions Give A Heap A Weak Amount of Orderawadhesh.kumarОценок пока нет
- Brics: Hash and Displace: Efficient Evaluation of Minimal Perfect Hash FunctionsДокумент14 страницBrics: Hash and Displace: Efficient Evaluation of Minimal Perfect Hash FunctionsMaheshwar BhatОценок пока нет
- QuicksortДокумент2 страницыQuicksortDjJethro Bagcat FernandezОценок пока нет
- More Robust Hashing: Cuckoo Hashing With A Stash: Adam Kirsch Michael Mitzenmacher Udi WiederДокумент25 страницMore Robust Hashing: Cuckoo Hashing With A Stash: Adam Kirsch Michael Mitzenmacher Udi WiederMirza AbdullaОценок пока нет
- Chalmers Tekniska Hogskola, Goteborg, Sweden.: Higher-Order Function Polymor-Phic Typing Same Dierent Lazy EvaluationДокумент44 страницыChalmers Tekniska Hogskola, Goteborg, Sweden.: Higher-Order Function Polymor-Phic Typing Same Dierent Lazy EvaluationJeffrey GeОценок пока нет
- Randomized Search Trees: This Paper Is Dedicated To The Memory ofДокумент33 страницыRandomized Search Trees: This Paper Is Dedicated To The Memory ofrandomrandom221Оценок пока нет
- Primitive Data Structures: 2. Types of Data Structure?Документ8 страницPrimitive Data Structures: 2. Types of Data Structure?Gautham SajuОценок пока нет
- CS1Ah Lecture Note 20 Recursion and Stacks: 20.1 The Towers of HanoiДокумент4 страницыCS1Ah Lecture Note 20 Recursion and Stacks: 20.1 The Towers of HanoientewasteОценок пока нет
- Heap AlgorithmДокумент6 страницHeap AlgorithmMaysam AlkeramОценок пока нет
- Acl08 Elsayed Pairwise SimДокумент4 страницыAcl08 Elsayed Pairwise SimNassma MohandesОценок пока нет
- Re Sizable ArraysДокумент12 страницRe Sizable ArraysSeraphina NixОценок пока нет
- CLOPE: A Fast and Effective Clustering Algorithm For Transactional DataДокумент6 страницCLOPE: A Fast and Effective Clustering Algorithm For Transactional Dataaegr82Оценок пока нет
- Heap (Data Structure) - WikiДокумент3 страницыHeap (Data Structure) - WikipajsercinaaОценок пока нет
- Biased Skip Lists: I W W N I 1 IДокумент17 страницBiased Skip Lists: I W W N I 1 IAnanda RamanОценок пока нет
- Fast Stable MergingДокумент8 страницFast Stable Mergingemwud19Оценок пока нет
- Data Structure - UNIT-1Документ28 страницData Structure - UNIT-1Sriram SekarОценок пока нет
- Internal Sorting:Definition: When The Entire Dataset Can FitДокумент12 страницInternal Sorting:Definition: When The Entire Dataset Can FitShubham KumarОценок пока нет
- Heap and Priority Queue: Li Yin February 6, 2019Документ12 страницHeap and Priority Queue: Li Yin February 6, 2019markОценок пока нет
- Van Emde Boas TreesДокумент5 страницVan Emde Boas TreesseidametovaОценок пока нет
- Better External Memory Suffix Array Construction: Roman Dementiev, Juha K Arkk Ainen, Jens Mehnert, Peter SandersДокумент12 страницBetter External Memory Suffix Array Construction: Roman Dementiev, Juha K Arkk Ainen, Jens Mehnert, Peter Sandersmanuelq9Оценок пока нет
- VLSI PLD 2011 (Compatibility Mode)Документ76 страницVLSI PLD 2011 (Compatibility Mode)ravikumarsid2990Оценок пока нет
- APPENDIX IEEE Line Limit (MW) P.U PDFДокумент19 страницAPPENDIX IEEE Line Limit (MW) P.U PDFاحمد جاسم شكارهОценок пока нет
- Sept 2013 - All Options On The TableДокумент10 страницSept 2013 - All Options On The Tableravikumarsid2990Оценок пока нет
- Energy Comes Together in Denmark - The Key To A Future Fossil-Free Danish Power SystemДокумент10 страницEnergy Comes Together in Denmark - The Key To A Future Fossil-Free Danish Power Systemravikumarsid2990Оценок пока нет
- Digital Integrated CircuitsДокумент17 страницDigital Integrated CircuitsumeshkhetaОценок пока нет
- May 2013 - The Future of CoalДокумент10 страницMay 2013 - The Future of Coalravikumarsid2990Оценок пока нет
- Pentaho Community - User GuideДокумент22 страницыPentaho Community - User GuideGideoni SilvaОценок пока нет
- 44 Formal Covalidation Low Level InterfacesДокумент8 страниц44 Formal Covalidation Low Level Interfacesravikumarsid2990Оценок пока нет
- VHDL LecturesДокумент676 страницVHDL LecturesDurvesh BholeОценок пока нет
- Essential Features To Look For in A Good Business Intelligence SolutionДокумент18 страницEssential Features To Look For in A Good Business Intelligence Solutionravikumarsid2990Оценок пока нет
- PMR Ecmls12 DraftДокумент9 страницPMR Ecmls12 Draftravikumarsid2990Оценок пока нет
- Chapter 18. Network Management Basics: FCAPS ModelДокумент7 страницChapter 18. Network Management Basics: FCAPS Modelravikumarsid2990Оценок пока нет
- Eisner - MST TutorialДокумент78 страницEisner - MST Tutorialravikumarsid2990Оценок пока нет
- TSP SurveyДокумент24 страницыTSP SurveyNeha JainОценок пока нет
- The Microarchitecture of Superscalar ProcessorsДокумент26 страницThe Microarchitecture of Superscalar Processorsravikumarsid2990Оценок пока нет
- Improved Selection Sort AlgorithmДокумент5 страницImproved Selection Sort Algorithmravikumarsid2990Оценок пока нет
- Burrows-Wheeler TransformДокумент42 страницыBurrows-Wheeler Transformravikumarsid2990Оценок пока нет
- Lecture 17 XML and XPATH and XQUERYДокумент93 страницыLecture 17 XML and XPATH and XQUERYravikumarsid2990Оценок пока нет
- Excellent Paper On CompressionДокумент10 страницExcellent Paper On Compressionmehrab_ramzan1194Оценок пока нет
- 08 XQueryДокумент88 страниц08 XQueryravikumarsid2990Оценок пока нет
- CS 162 Memory Consistency ModelsДокумент22 страницыCS 162 Memory Consistency Modelsravikumarsid2990Оценок пока нет
- DHCPДокумент20 страницDHCPJohn Thomas RoganОценок пока нет
- CPS MidtermДокумент2 страницыCPS Midtermravikumarsid2990Оценок пока нет
- Heap Sort Min-Heap or Max-HeapДокумент11 страницHeap Sort Min-Heap or Max-HeapRehan PathanОценок пока нет
- Sample Viva Questions of DSA LABДокумент2 страницыSample Viva Questions of DSA LABshubham dhabarde100% (1)
- Mcdermott 6014 Final Summer B 17Документ14 страницMcdermott 6014 Final Summer B 17api-373102817Оценок пока нет
- Fuzzy ID3Документ6 страницFuzzy ID3Manan Agarwal100% (1)
- CS 304 Design and Analysis of Algorithm: Minimum Spanning TreeДокумент35 страницCS 304 Design and Analysis of Algorithm: Minimum Spanning TreeMonjurur shipuОценок пока нет
- Left - Right-Rotation PDFДокумент5 страницLeft - Right-Rotation PDFRajContentОценок пока нет
- 04 DS Quiz Set GraphsДокумент36 страниц04 DS Quiz Set Graphsvinay harshaОценок пока нет
- Lecture 7: Segment, Interval, Priority-Search Trees: 7.1.1 Problem StatementДокумент8 страницLecture 7: Segment, Interval, Priority-Search Trees: 7.1.1 Problem Statementsiri10307Оценок пока нет
- Sree Saraswathi Thyagaraja College (Autonomous), PollachiДокумент19 страницSree Saraswathi Thyagaraja College (Autonomous), PollachiElamparithi ManiezhilanОценок пока нет
- RosenCh8 (Tree)Документ72 страницыRosenCh8 (Tree)Betris Yuriza DarwisОценок пока нет
- Ds With Python Week11-1Документ11 страницDs With Python Week11-1tanushaОценок пока нет
- Tree Data Structure NotesДокумент39 страницTree Data Structure NotesKBS SrikarОценок пока нет
- Top To Bottom HomeworkДокумент3 страницыTop To Bottom Homeworkabhi74Оценок пока нет
- Final-Term DSA V1Документ3 страницыFinal-Term DSA V1Asadullah Tariq TariqОценок пока нет
- HeapsДокумент372 страницыHeapsasd qweОценок пока нет
- Minimum Spanning Trees: (Some Material Adapted From Slides by Peter Lee)Документ23 страницыMinimum Spanning Trees: (Some Material Adapted From Slides by Peter Lee)mdhuq1Оценок пока нет
- Threaded Binary TreeДокумент25 страницThreaded Binary Treepramodsoni0007Оценок пока нет
- TD SpanningtreeДокумент4 страницыTD SpanningtreeKarine DeschinkelОценок пока нет
- Walmart LeetcodeДокумент7 страницWalmart LeetcodeNitish KumarОценок пока нет
- (Nonlinear (6-31) : Structures GTU-Sem. 3-Comp/T) Binary TreeДокумент25 страниц(Nonlinear (6-31) : Structures GTU-Sem. 3-Comp/T) Binary TreeBHAVESHОценок пока нет
- Trees and Binary TreesДокумент59 страницTrees and Binary Treessairamteja nekkantiОценок пока нет
- PPT6 - Binary Search TreeДокумент33 страницыPPT6 - Binary Search TreeRapik HardiantoОценок пока нет
- Advanced Data Structure Lab ProgramsДокумент84 страницыAdvanced Data Structure Lab Programskajendran4958Оценок пока нет
- Kruskal's Algorithm - WikipediaДокумент22 страницыKruskal's Algorithm - WikipediaSubhadeep DasОценок пока нет
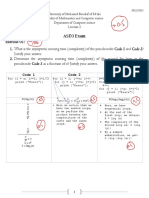
- Exercise 01:: ASD3 ExamДокумент4 страницыExercise 01:: ASD3 Examjafar henniОценок пока нет
- cs301 Final Term PapersДокумент9 страницcs301 Final Term PapersJibran HayatОценок пока нет
- 06 Activity 1 ARG Data Structures Orienza Kenan M PDFДокумент1 страница06 Activity 1 ARG Data Structures Orienza Kenan M PDFMingОценок пока нет
- LeetcodeДокумент2 страницыLeetcodeRohan MittalОценок пока нет
- It 2201 - Data Structures and Algorithms 2010Документ2 страницыIt 2201 - Data Structures and Algorithms 2010VENKATANARAYANANОценок пока нет
- BSP Trees PresentationДокумент6 страницBSP Trees PresentationJürgen HoldschikОценок пока нет
- Fusion Strategy: How Real-Time Data and AI Will Power the Industrial FutureОт EverandFusion Strategy: How Real-Time Data and AI Will Power the Industrial FutureОценок пока нет
- Blockchain Basics: A Non-Technical Introduction in 25 StepsОт EverandBlockchain Basics: A Non-Technical Introduction in 25 StepsРейтинг: 4.5 из 5 звезд4.5/5 (24)
- Business Intelligence Strategy and Big Data Analytics: A General Management PerspectiveОт EverandBusiness Intelligence Strategy and Big Data Analytics: A General Management PerspectiveРейтинг: 5 из 5 звезд5/5 (5)
- Grokking Algorithms: An illustrated guide for programmers and other curious peopleОт EverandGrokking Algorithms: An illustrated guide for programmers and other curious peopleРейтинг: 4 из 5 звезд4/5 (16)
- SQL QuickStart Guide: The Simplified Beginner's Guide to Managing, Analyzing, and Manipulating Data With SQLОт EverandSQL QuickStart Guide: The Simplified Beginner's Guide to Managing, Analyzing, and Manipulating Data With SQLРейтинг: 4.5 из 5 звезд4.5/5 (46)
- THE STEP BY STEP GUIDE FOR SUCCESSFUL IMPLEMENTATION OF DATA LAKE-LAKEHOUSE-DATA WAREHOUSE: "THE STEP BY STEP GUIDE FOR SUCCESSFUL IMPLEMENTATION OF DATA LAKE-LAKEHOUSE-DATA WAREHOUSE"От EverandTHE STEP BY STEP GUIDE FOR SUCCESSFUL IMPLEMENTATION OF DATA LAKE-LAKEHOUSE-DATA WAREHOUSE: "THE STEP BY STEP GUIDE FOR SUCCESSFUL IMPLEMENTATION OF DATA LAKE-LAKEHOUSE-DATA WAREHOUSE"Рейтинг: 3 из 5 звезд3/5 (1)
- Big Data and Analytics: The key concepts and practical applications of big data analytics (English Edition)От EverandBig Data and Analytics: The key concepts and practical applications of big data analytics (English Edition)Оценок пока нет
- Joe Celko's SQL for Smarties: Advanced SQL ProgrammingОт EverandJoe Celko's SQL for Smarties: Advanced SQL ProgrammingРейтинг: 3 из 5 звезд3/5 (1)
- Cloud Computing Playbook: 10 In 1 Practical Cloud Design With Azure, Aws And TerraformОт EverandCloud Computing Playbook: 10 In 1 Practical Cloud Design With Azure, Aws And TerraformОценок пока нет
- DB2 9 System Administration for z/OS: Certification Study Guide: Exam 737От EverandDB2 9 System Administration for z/OS: Certification Study Guide: Exam 737Рейтинг: 3 из 5 звезд3/5 (2)
- Mastering Amazon Relational Database Service for MySQL: Building and configuring MySQL instances (English Edition)От EverandMastering Amazon Relational Database Service for MySQL: Building and configuring MySQL instances (English Edition)Оценок пока нет
- High-Performance Oracle: Proven Methods for Achieving Optimum Performance and AvailabilityОт EverandHigh-Performance Oracle: Proven Methods for Achieving Optimum Performance and AvailabilityОценок пока нет
- Optimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesОт EverandOptimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesОценок пока нет
- Modelling Business Information: Entity relationship and class modelling for Business AnalystsОт EverandModelling Business Information: Entity relationship and class modelling for Business AnalystsОценок пока нет
- Web Dragons: Inside the Myths of Search Engine TechnologyОт EverandWeb Dragons: Inside the Myths of Search Engine TechnologyРейтинг: 4.5 из 5 звезд4.5/5 (2)
- DATABASE From the conceptual model to the final application in Access, Visual Basic, Pascal, Html and Php: Inside, examples of applications created with Access, Visual Studio, Lazarus and WampОт EverandDATABASE From the conceptual model to the final application in Access, Visual Basic, Pascal, Html and Php: Inside, examples of applications created with Access, Visual Studio, Lazarus and WampОценок пока нет