Вам также может понравиться
- AC Generator Jedlik's DynamoДокумент4 страницыAC Generator Jedlik's DynamoSonal NarulaОценок пока нет
- Portable Sound Wave Fire ExtinguisherДокумент3 страницыPortable Sound Wave Fire ExtinguisherInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- 2014-Kinetic-Planning-Guide (2017 - 04 - 19 16 - 41 - 43 UTC)Документ86 страниц2014-Kinetic-Planning-Guide (2017 - 04 - 19 16 - 41 - 43 UTC)Ion100% (1)
- Energy FloorДокумент3 страницыEnergy FloorMark Gade GallardoОценок пока нет
- Energy Harvesting TilesДокумент7 страницEnergy Harvesting TilesMahathir AhmadОценок пока нет
- Wind power stations in Xinjiang, ChinaДокумент63 страницыWind power stations in Xinjiang, ChinaMUHAMMAD SIDDIQUEОценок пока нет
- Design of Flywheel For Improved Energy Storage Using Computer Aided AnalysisДокумент42 страницыDesign of Flywheel For Improved Energy Storage Using Computer Aided AnalysisRanjit Singh Sarban SinghОценок пока нет
- MAGLEV Wind Mill Power GenerationДокумент16 страницMAGLEV Wind Mill Power GenerationNagabhushanaОценок пока нет
- G09075661 PDFДокумент6 страницG09075661 PDFVoundai MahamatОценок пока нет
- Peizeoelectrical PavementsДокумент37 страницPeizeoelectrical PavementsAman KumarОценок пока нет
- Research Paper Electrical Power Generation Using Piezoelectric CrystalДокумент3 страницыResearch Paper Electrical Power Generation Using Piezoelectric CrystalmeelavkavjenОценок пока нет
- Vertical Axis Wind Mill Final Report11111111Документ56 страницVertical Axis Wind Mill Final Report11111111Amal GirishОценок пока нет
- Supercapacitor Important File2Документ53 страницыSupercapacitor Important File2Mina YoussefОценок пока нет
- Generating Electricity From A Bicycle DynamoДокумент6 страницGenerating Electricity From A Bicycle Dynamosuharto_pppptkipaОценок пока нет
- Power Generation from Road Using Piezoelectric MethodДокумент18 страницPower Generation from Road Using Piezoelectric MethodSreejith JithuОценок пока нет
- Maglev Wind Turbine Based Power Generation-Ijaerdv04i0443384 - 3 PDFДокумент5 страницMaglev Wind Turbine Based Power Generation-Ijaerdv04i0443384 - 3 PDFPeriyasamy .devadosОценок пока нет
- Triboelectric Nanogenerators As New Energy Technology For Self-Powered Systems and As Active Mechanical and Chemical SensorsДокумент25 страницTriboelectric Nanogenerators As New Energy Technology For Self-Powered Systems and As Active Mechanical and Chemical SensorsAnonymous AEicha08AF100% (1)
- Piezoelectric Energy HarvestingДокумент15 страницPiezoelectric Energy HarvestingNitish HuriaОценок пока нет
- MAPÚA UNIVERSITY EXPERIMENT NO. 4 HYDROELECTRIC POWER PLANTДокумент26 страницMAPÚA UNIVERSITY EXPERIMENT NO. 4 HYDROELECTRIC POWER PLANTAli Requiso MahmudОценок пока нет
- Applications of Tesla CoilsДокумент12 страницApplications of Tesla CoilsNitin Daswani100% (1)
- Ultrasonic MotorsДокумент17 страницUltrasonic Motorsmotoringdc67% (3)
- Development of Solar and Wind Hybrid TreeДокумент13 страницDevelopment of Solar and Wind Hybrid TreePATEL KRUNALОценок пока нет
- Solar based mini fridge for rural healthcareДокумент12 страницSolar based mini fridge for rural healthcareMUHAMMED FAISALОценок пока нет
- Capacitor and Capacitance Marilag and Masicap KryztabelleДокумент3 страницыCapacitor and Capacitance Marilag and Masicap KryztabelleGenesis Austria100% (1)
- Iced SP 1037Документ5 страницIced SP 1037Felipe CarvalhoОценок пока нет
- Electromagnetic Energy Harvesting System For Low FreqДокумент9 страницElectromagnetic Energy Harvesting System For Low FreqOz YmandiasОценок пока нет
- Bubble Power ReportДокумент23 страницыBubble Power ReportSenthil Kumar100% (1)
- Design and Evaluation of A Disc-Type Magnetically Geared PM Wind GeneratorДокумент6 страницDesign and Evaluation of A Disc-Type Magnetically Geared PM Wind GeneratorLodewykbronnОценок пока нет
- Flywheel AtzДокумент5 страницFlywheel AtzRakesh Bhaktha RОценок пока нет
- .Highway Power Generation Using Low Cost Vertical Axis Wind Turbine (VAWT) PDFДокумент5 страниц.Highway Power Generation Using Low Cost Vertical Axis Wind Turbine (VAWT) PDFGautham NОценок пока нет
- Literature Review On Triboelectric NanogДокумент9 страницLiterature Review On Triboelectric NanogBINOY BERAОценок пока нет
- Sustainability Insights For Electric Power Sector Transformation: Looking at NigeriaОт EverandSustainability Insights For Electric Power Sector Transformation: Looking at NigeriaОценок пока нет
- Project Report On Gravity Ligh FileДокумент25 страницProject Report On Gravity Ligh FileNeeraj VarmaОценок пока нет
- PHD RESEARCH PROPOSALДокумент11 страницPHD RESEARCH PROPOSALEvariste UwamahoroОценок пока нет
- Diamond & Related MaterialsДокумент22 страницыDiamond & Related MaterialsPetr Cigler100% (1)
- Energy Harvesting Tree ReportДокумент14 страницEnergy Harvesting Tree ReportAnonymous R3xiiFkXN8100% (1)
- ENERGY HARVESTING FOOTSTEPS PIEZOELECTRICДокумент2 страницыENERGY HARVESTING FOOTSTEPS PIEZOELECTRICcamila0% (1)
- Vertical Axis Wind TurbineДокумент50 страницVertical Axis Wind TurbineRaunaq Singh100% (2)
- Solar Water HeaterДокумент10 страницSolar Water HeaterTijani MellalОценок пока нет
- Architectural configurations for buildings with innovative seismic systemsДокумент12 страницArchitectural configurations for buildings with innovative seismic systemsChan Siew ChongОценок пока нет
- Research PaperДокумент7 страницResearch PaperPatrick Jose Dela VegaОценок пока нет
- Design and Fabrication of Electromagnetic Mechanical EngineДокумент66 страницDesign and Fabrication of Electromagnetic Mechanical EnginePavanОценок пока нет
- Vortex Wind TurbineДокумент11 страницVortex Wind TurbineTanviОценок пока нет
- On "Footstep Power Generation System Using Microconroller" Submitted in Partial Fulfillment For The Award of The Degree of in Submitted by Iiibtech1 SEM (17701A0215)Документ26 страницOn "Footstep Power Generation System Using Microconroller" Submitted in Partial Fulfillment For The Award of The Degree of in Submitted by Iiibtech1 SEM (17701A0215)geetha lakshmiОценок пока нет
- Solar Tracker Project RCCIITДокумент41 страницаSolar Tracker Project RCCIITKaran MОценок пока нет
- Double Perovskite Sr2B B O6 Oxides For HДокумент19 страницDouble Perovskite Sr2B B O6 Oxides For HTobiasОценок пока нет
- Design and Development of Road Power GenerationДокумент11 страницDesign and Development of Road Power GenerationRyan Joseph ManigbasОценок пока нет
- Micro Flywheel Energy HarvestДокумент10 страницMicro Flywheel Energy HarvestkhayatОценок пока нет
- Construction of 4-Lane Flyover at Amberpet Mini Project PresentationДокумент9 страницConstruction of 4-Lane Flyover at Amberpet Mini Project PresentationVujjini RaghuОценок пока нет
- PavegenДокумент28 страницPavegensravanОценок пока нет
- Basic NanogeneratorДокумент11 страницBasic NanogeneratorNEMI CHAND SOODОценок пока нет
- Review of Electrical Energy Storage Technologies, Materials and Systems: Challenges and Prospects For Large-Scale Grid StorageДокумент155 страницReview of Electrical Energy Storage Technologies, Materials and Systems: Challenges and Prospects For Large-Scale Grid StorageAnonymous oFjwtrgrОценок пока нет
- Homopolar Generator GuideДокумент5 страницHomopolar Generator GuideYashwanth SrinivasaОценок пока нет
- High Voltage DC by Marx GeneratorДокумент2 страницыHigh Voltage DC by Marx GeneratorKalpana GunreddyОценок пока нет
- Thesis - Bosshard - IPT - 2015 - Web - Version - Multi Objective Optmization of Inductive Power Transfet Systems For Ev ChargingДокумент251 страницаThesis - Bosshard - IPT - 2015 - Web - Version - Multi Objective Optmization of Inductive Power Transfet Systems For Ev ChargingWesley de PaulaОценок пока нет
- Micro Gas Turbine TechnologyДокумент69 страницMicro Gas Turbine TechnologyJayaAmirthavarshini100% (1)
- FYP Generation Electricity Piezoelectric CrystalДокумент29 страницFYP Generation Electricity Piezoelectric CrystalHamzah Reza0% (1)
- Generate Electricity Using Zinc Oxide Nano WiresДокумент23 страницыGenerate Electricity Using Zinc Oxide Nano WiresRajendran HarikrishnanОценок пока нет
- Solar Refrigeration Using Peltier EffectДокумент8 страницSolar Refrigeration Using Peltier EffectObuli KarthikeyanОценок пока нет
- Power Generation Using Speed Breakers and Efficient Use of Energy Created by It.Документ57 страницPower Generation Using Speed Breakers and Efficient Use of Energy Created by It.Vaibhav KhareОценок пока нет
- Price List Solar Pack (SCC+Inverter) - April'21 - Pan IndiaДокумент16 страницPrice List Solar Pack (SCC+Inverter) - April'21 - Pan IndiaAmit SinghОценок пока нет
- PRASHANT T.A. BillДокумент5 страницPRASHANT T.A. BillAmit SinghОценок пока нет
- Adobe Scan 26-Mar-2021Документ1 страницаAdobe Scan 26-Mar-2021Amit SinghОценок пока нет
- Addo Distributor FOC - North & East 1-4-21 To 30-4-21Документ1 страницаAddo Distributor FOC - North & East 1-4-21 To 30-4-21Amit SinghОценок пока нет
- Nitin Weekly ReportДокумент2 страницыNitin Weekly ReportAmit SinghОценок пока нет
- Solar Product - Standalone Wef 1st Apr-21Документ1 страницаSolar Product - Standalone Wef 1st Apr-21Amit SinghОценок пока нет
- Eastman Short Tubular FOC Scheme-Pan India (Exccept HR & Del) 1-4-21 To 30-4-21Документ1 страницаEastman Short Tubular FOC Scheme-Pan India (Exccept HR & Del) 1-4-21 To 30-4-21Amit SinghОценок пока нет
- PF & Pension Fund Deptt. Circular No. PF & Pension Fund Deptt. Circular No.05/2021Документ4 страницыPF & Pension Fund Deptt. Circular No. PF & Pension Fund Deptt. Circular No.05/2021Amit SinghОценок пока нет
- March T.A. BillДокумент5 страницMarch T.A. BillAmit SinghОценок пока нет
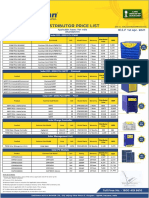
- Eastman Pricelist Short Tubular Battery - Pan India (Except Odisha & Assam) Wef 1st Apr-21Документ1 страницаEastman Pricelist Short Tubular Battery - Pan India (Except Odisha & Assam) Wef 1st Apr-21Amit SinghОценок пока нет
- Addo Price List Inverter Battery - Pan India (Except Odisha & Assam) Wef 1st Apr-21Документ1 страницаAddo Price List Inverter Battery - Pan India (Except Odisha & Assam) Wef 1st Apr-21Amit SinghОценок пока нет
- Addo Short Tubular Scheme - Pan India (Except HR & Del) 1-4-21 To 30-4-21Документ1 страницаAddo Short Tubular Scheme - Pan India (Except HR & Del) 1-4-21 To 30-4-21Amit SinghОценок пока нет
- Solar Product - Solar Pack Price Wef 1st Apr-21Документ1 страницаSolar Product - Solar Pack Price Wef 1st Apr-21Amit SinghОценок пока нет
- Addo Direct Dealer FOC - North & East 1-4-21 To 30-4-21Документ1 страницаAddo Direct Dealer FOC - North & East 1-4-21 To 30-4-21Amit SinghОценок пока нет
- Xii Class (Formulae)Документ30 страницXii Class (Formulae)Amit SinghОценок пока нет
- MMJAA - GugrapurДокумент100 страницMMJAA - GugrapurAmit SinghОценок пока нет
- Uttar Pradesh Disability ID Card DetailsДокумент1 страницаUttar Pradesh Disability ID Card DetailsAmit SinghОценок пока нет
- MMJAA - GugrapurДокумент100 страницMMJAA - GugrapurAmit SinghОценок пока нет
- Test - 3 (Maths) Board Test (Paper)Документ6 страницTest - 3 (Maths) Board Test (Paper)Amit SinghОценок пока нет
- NEET Weekly Test Physics, Chemistry & BiologyДокумент11 страницNEET Weekly Test Physics, Chemistry & BiologyAmit SinghОценок пока нет
- Test - 4 (English) Board Test (Solution)Документ4 страницыTest - 4 (English) Board Test (Solution)Amit SinghОценок пока нет
- Indian Income Tax Return Acknowledgement: Name of Premises/Building/VillageДокумент1 страницаIndian Income Tax Return Acknowledgement: Name of Premises/Building/VillageAmit SinghОценок пока нет
- Maths Assignment (Faizan Alam)Документ29 страницMaths Assignment (Faizan Alam)Amit SinghОценок пока нет
- IIT Foundation Weekly Test 21-03-2021Документ8 страницIIT Foundation Weekly Test 21-03-2021Amit SinghОценок пока нет
- Test - 4 (English) Board TestДокумент10 страницTest - 4 (English) Board TestAmit SinghОценок пока нет
- Test - 4 (English) Board TestДокумент10 страницTest - 4 (English) Board TestAmit SinghОценок пока нет
- Indian Income Tax Return Acknowledgement: Do Not Send This Acknowledgement To CPC, BengaluruДокумент1 страницаIndian Income Tax Return Acknowledgement: Do Not Send This Acknowledgement To CPC, BengaluruAmit SinghОценок пока нет
- NEET Weekly TestДокумент8 страницNEET Weekly TestAmit SinghОценок пока нет
- Faizan Alam Assignment 2Документ17 страницFaizan Alam Assignment 2Amit SinghОценок пока нет
- NEET Weekly TestДокумент8 страницNEET Weekly TestAmit SinghОценок пока нет
- Position paper-MUNUCCLE 2022: Refugees) Des États !Документ2 страницыPosition paper-MUNUCCLE 2022: Refugees) Des États !matОценок пока нет
- Piping Material Classes GuideДокумент98 страницPiping Material Classes GuideLuis Pottozen VillanuevaОценок пока нет
- EcoLettsandSOM, Dulvy Et Al 2004Документ25 страницEcoLettsandSOM, Dulvy Et Al 2004Nestor TorresОценок пока нет
- Chennai's 9 sewage treatment plants process 486 MLDДокумент5 страницChennai's 9 sewage treatment plants process 486 MLDmoni_john_1Оценок пока нет
- Micdak BackgroundДокумент3 страницыMicdak Backgroundappiah ernestОценок пока нет
- Diagnostic and Statistical Manual of Mental Disorders: Distinction From ICD Pre-DSM-1 (1840-1949)Документ25 страницDiagnostic and Statistical Manual of Mental Disorders: Distinction From ICD Pre-DSM-1 (1840-1949)Unggul YudhaОценок пока нет
- Characteristics of Uveitis Presenting For The First Time in The Elderly Analysis of 91 Patients in A Tertiary CenterДокумент9 страницCharacteristics of Uveitis Presenting For The First Time in The Elderly Analysis of 91 Patients in A Tertiary CenterFrancescFranquesaОценок пока нет
- NLOG GS PUB 1580 VGEXP-INT3-GG-RPT-0001.00 P11-06 Geological FWRДокумент296 страницNLOG GS PUB 1580 VGEXP-INT3-GG-RPT-0001.00 P11-06 Geological FWRAhmed GharbiОценок пока нет
- LabyrinthДокумент4 страницыLabyrinthAyezaZuberyОценок пока нет
- New Microsoft Excel WorksheetДокумент4 страницыNew Microsoft Excel WorksheetRaheel Neo AhmadОценок пока нет
- Pulsar2 User Manual - ENДокумент83 страницыPulsar2 User Manual - ENJanette SouzaОценок пока нет
- Challenges of Tourism Students in Commercial CookingДокумент29 страницChallenges of Tourism Students in Commercial CookingMaeve Anne JaimeОценок пока нет
- Fluid Mechanics Sessional: Dhaka University of Engineering & Technology, GazipurДокумент17 страницFluid Mechanics Sessional: Dhaka University of Engineering & Technology, GazipurMd saydul islamОценок пока нет
- The Girls Center: 2023 Workout CalendarДокумент17 страницThe Girls Center: 2023 Workout Calendark4270621Оценок пока нет
- Jounce Therapeutics Company Events and Start DatesДокумент48 страницJounce Therapeutics Company Events and Start DatesEquity NestОценок пока нет
- Farid Jafarov ENG Project FinanceДокумент27 страницFarid Jafarov ENG Project FinanceSky walkingОценок пока нет
- Nitric OxideДокумент20 страницNitric OxideGanesh V GaonkarОценок пока нет
- Fitness WalkingДокумент192 страницыFitness Walkingjha.sofcon5941100% (1)
- RA8485 Animal Welfare Act (Carabao Slaughter)Документ2 страницыRA8485 Animal Welfare Act (Carabao Slaughter)Jazreth Gaile100% (1)
- General Specifications: Detail AДокумент1 страницаGeneral Specifications: Detail AJeniel PascualОценок пока нет
- DVAIO R3 PRO HD Sound Quality In-Ear Wired Earphone Amazon - in ElectronicsДокумент1 страницаDVAIO R3 PRO HD Sound Quality In-Ear Wired Earphone Amazon - in Electronicsdinple sharmaОценок пока нет
- Ethamem-G1: Turn-Key Distillery Plant Enhancement With High Efficiency and Low Opex Ethamem TechonologyДокумент25 страницEthamem-G1: Turn-Key Distillery Plant Enhancement With High Efficiency and Low Opex Ethamem TechonologyNikhilОценок пока нет
- Zygomatic Complex FracturesДокумент128 страницZygomatic Complex FracturesTarun KashyapОценок пока нет
- Base para Detectores de Humo y Temperatura KIDDE KI-SBДокумент2 страницыBase para Detectores de Humo y Temperatura KIDDE KI-SBAnderson CastañedaОценок пока нет
- Nicenstripy Gardening Risk AssessmentДокумент38 страницNicenstripy Gardening Risk AssessmentVirta Nisa100% (1)
- Jairo Garzon 1016001932 G900003 1580 Task4Документ12 страницJairo Garzon 1016001932 G900003 1580 Task4Jairo Garzon santanaОценок пока нет
- Role of Family and Society in The Rehabiloitation of Offenders PDFДокумент4 страницыRole of Family and Society in The Rehabiloitation of Offenders PDFDevlika DasОценок пока нет
- WSO 2022 IB Working Conditions SurveyДокумент42 страницыWSO 2022 IB Working Conditions SurveyPhạm Hồng HuếОценок пока нет
- Case Studies On Industrial Accidents - 2Документ84 страницыCase Studies On Industrial Accidents - 2Parth N Bhatt100% (2)
- Alok ResumeДокумент3 страницыAlok Resumealok choudharyОценок пока нет