Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Graphite Beneficiation ProcessДокумент7 страницGraphite Beneficiation ProcesssanjibkrjanaОценок пока нет
- Project Area - PDF: Your ProgressДокумент9 страницProject Area - PDF: Your ProgresssanjibkrjanaОценок пока нет
- Graphite BookДокумент384 страницыGraphite BooksanjibkrjanaОценок пока нет
- 5S PrincipleДокумент53 страницы5S PrincipleAmir M. VillasОценок пока нет
- Minerals 07 00115Документ13 страницMinerals 07 00115sanjibkrjanaОценок пока нет
- CalcvesselДокумент11 страницCalcvesselHami Keserci100% (1)
- 7734 Van HorssenДокумент51 страница7734 Van HorssensanjibkrjanaОценок пока нет
- Beneficiation of Low Grade Graphite Ore Deposits of Tamilnadu (India)Документ10 страницBeneficiation of Low Grade Graphite Ore Deposits of Tamilnadu (India)sanjibkrjanaОценок пока нет
- Are View of Graphite Benef I Ciati On TechniquesДокумент13 страницAre View of Graphite Benef I Ciati On TechniquessanjibkrjanaОценок пока нет
- Methods of Extraction of Precious Metals From High Carbon RockДокумент4 страницыMethods of Extraction of Precious Metals From High Carbon RocksanjibkrjanaОценок пока нет
- Beneficiation of Low Grade Graphite Ore of Eastern India by Two-Stage Grinding and Flotation N. Vasumathi, T.V. Vijaya Kumar, B. Nayak, S. Subba Rao, S. Prabhakar, G. Bhaskar RajuДокумент9 страницBeneficiation of Low Grade Graphite Ore of Eastern India by Two-Stage Grinding and Flotation N. Vasumathi, T.V. Vijaya Kumar, B. Nayak, S. Subba Rao, S. Prabhakar, G. Bhaskar RajusanjibkrjanaОценок пока нет
- 1 General Products 82511 113Документ1 страница1 General Products 82511 113Fajr Al-FurqonОценок пока нет
- Floatability Study of Graphite Ore From Southeast Sulawesi (Indonesia)Документ7 страницFloatability Study of Graphite Ore From Southeast Sulawesi (Indonesia)sanjibkrjanaОценок пока нет
- Determination of Optimal Flotation Conditions of Low-Grade Graphite OreДокумент8 страницDetermination of Optimal Flotation Conditions of Low-Grade Graphite OresanjibkrjanaОценок пока нет
- Eng in Data 2010Документ24 страницыEng in Data 2010Shaurya RangiОценок пока нет
- SL No Product Issue Detail of Items in Issues: Outer TubeДокумент14 страницSL No Product Issue Detail of Items in Issues: Outer TubesanjibkrjanaОценок пока нет
- Coal Mining in IndiaДокумент2 страницыCoal Mining in IndiasanjibkrjanaОценок пока нет
- Lovejoy CouplingsДокумент28 страницLovejoy CouplingsCarlos Alberto Bardales GarciaОценок пока нет
- Edem TutorialДокумент19 страницEdem Tutorialsanjibkrjana100% (4)
- Nyloc Nut Is 7002 PDFДокумент11 страницNyloc Nut Is 7002 PDFsanjibkrjana0% (1)
- HP PDFДокумент20 страницHP PDFsanjibkrjanaОценок пока нет
- Parker Fluid Power Seal Design Guide 5370Документ300 страницParker Fluid Power Seal Design Guide 5370edwardsheridan0% (1)
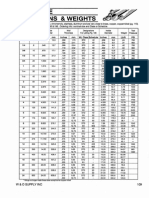
- Pipe's Wall Thickness: ASTM A312, A358, A778, A53, A106, API 5L ASME/ANSI B36.19 B36.10Документ0 страницPipe's Wall Thickness: ASTM A312, A358, A778, A53, A106, API 5L ASME/ANSI B36.19 B36.10Siddiqui Abdul KhaliqОценок пока нет
- Fasteners StandardsДокумент98 страницFasteners StandardsRahul Betgeri100% (4)
- IndustrialApplications PDFДокумент2 страницыIndustrialApplications PDFsanjibkrjanaОценок пока нет
- Rotary Seal Design GuideДокумент434 страницыRotary Seal Design GuideBhargav Suvagiya100% (3)
- ASTM D5162 08 Inspeccion Con HolidayДокумент5 страницASTM D5162 08 Inspeccion Con HolidayJesus A100% (1)
- Potash Flotation ProcessДокумент8 страницPotash Flotation ProcesssanjibkrjanaОценок пока нет
- UHMW (Ultra High Molecular Weight Polyethylene) : General Material PropertiesДокумент1 страницаUHMW (Ultra High Molecular Weight Polyethylene) : General Material PropertiessanjibkrjanaОценок пока нет
- Graphite Benefaction - IMMTДокумент45 страницGraphite Benefaction - IMMTsanjibkrjanaОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Fan Laws: Table 1 Fan Laws Parameters Variable ‘n' Speed Variable ‘ρ' Density Variable ‘d' Impeller Diameter p Q PpowДокумент3 страницыFan Laws: Table 1 Fan Laws Parameters Variable ‘n' Speed Variable ‘ρ' Density Variable ‘d' Impeller Diameter p Q Ppowgeetikag_23Оценок пока нет
- Wheel Rail WearДокумент11 страницWheel Rail WearREHAZ100% (1)
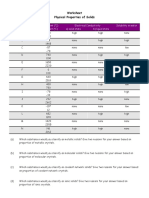
- 8 WORKSHEET Properties of SolidsДокумент1 страница8 WORKSHEET Properties of Solidskomal sheikhОценок пока нет
- Elements of Quantum MechanicsДокумент23 страницыElements of Quantum MechanicsEnyuan HuОценок пока нет
- Om0408 MS2 PDFДокумент72 страницыOm0408 MS2 PDFRuqayyahAL-FurqanОценок пока нет
- Evaporation-Rate For Swimming PoolДокумент5 страницEvaporation-Rate For Swimming PoolNelson VargasОценок пока нет
- Thermocoaxther 1394110578Документ28 страницThermocoaxther 1394110578Yassine BouaichiОценок пока нет
- Shake91 Input User ManualДокумент34 страницыShake91 Input User Manualyoki_triwahyudiОценок пока нет
- VLC Technical Seminar ReportДокумент11 страницVLC Technical Seminar ReportjashwanthmekalaОценок пока нет
- JKCET Medical 2015 Answer Key Phy CheДокумент12 страницJKCET Medical 2015 Answer Key Phy CheRuchi SharmaОценок пока нет
- Analytical Cross Sections For Monte Carlo Simulation of Photon Transport PDFДокумент22 страницыAnalytical Cross Sections For Monte Carlo Simulation of Photon Transport PDFFernanda RibeiroОценок пока нет
- ABB Electronic Products and Relays CM-Three-phase en 1111Документ24 страницыABB Electronic Products and Relays CM-Three-phase en 1111babaОценок пока нет
- Mechanics of Materials: Chong Zhou, Jin Y. OoiДокумент8 страницMechanics of Materials: Chong Zhou, Jin Y. OoiKent Emmanuel C. SoriaОценок пока нет
- Example Using The New Model Model With BootДокумент9 страницExample Using The New Model Model With BootMaryJane Ayisha Sado-ObahОценок пока нет
- P-Y Curves Methods - Laterally Loaded PilesДокумент3 страницыP-Y Curves Methods - Laterally Loaded PilesRamanathan GnanasambandamОценок пока нет
- (Unit) Title of The Chapter Name of FacilitatorДокумент35 страниц(Unit) Title of The Chapter Name of FacilitatorDipesh BasnetОценок пока нет
- Calculation For Multiple Effect EvaporatorДокумент14 страницCalculation For Multiple Effect Evaporatormsiregar_3891% (11)
- Sleeve Bearing Diagnostics R1Документ75 страницSleeve Bearing Diagnostics R1Daniel_Ali_bОценок пока нет
- VanDamme Course OutlineДокумент3 страницыVanDamme Course OutlineMike LikesbikesОценок пока нет
- Advances in Chemical Engineering PDFДокумент594 страницыAdvances in Chemical Engineering PDFNathalia DelgadoОценок пока нет
- Convection Heat TransferДокумент49 страницConvection Heat TransferAli almansouriОценок пока нет
- EXP - 4 Chip MorphologyДокумент2 страницыEXP - 4 Chip MorphologyRaju SaiОценок пока нет
- Equilibrium of Rigid Bodies Unit - IIДокумент36 страницEquilibrium of Rigid Bodies Unit - IIArkadeep MukherjeeОценок пока нет
- Audio Spotlighting NewДокумент30 страницAudio Spotlighting NewAnil Dsouza100% (1)
- VCSELsДокумент48 страницVCSELsmlogan_22Оценок пока нет
- Make An Atomic Theory Timeline! PDFДокумент4 страницыMake An Atomic Theory Timeline! PDFNathan KenmognieОценок пока нет
- Textbook of Electricity Chapter's Reviews Delmar's StandardДокумент12 страницTextbook of Electricity Chapter's Reviews Delmar's StandardCesar Bl91% (11)
- Solution Tuto 3Документ4 страницыSolution Tuto 3Abood AtiyatОценок пока нет
- General Physics 1 KinematicsДокумент62 страницыGeneral Physics 1 KinematicsPortia Egken100% (1)
- DVV TДокумент6 страницDVV TLiviu ToaderОценок пока нет