Вам также может понравиться
- NC MN OC08 09 Instalacion y Adecuacion de Pasamanos y Barandas de SeguridadДокумент8 страницNC MN OC08 09 Instalacion y Adecuacion de Pasamanos y Barandas de SeguridadXtral LacoОценок пока нет
- Ficha Tecnica Templador Ojo-Gancho Forged PDFДокумент1 страницаFicha Tecnica Templador Ojo-Gancho Forged PDFEdFreddy PGarcía100% (1)
- Une en - 10208 1Документ5 страницUne en - 10208 1EdFreddy PGarcíaОценок пока нет
- Ficha Tecnica Templador Ojo-Gancho Forged PDFДокумент1 страницаFicha Tecnica Templador Ojo-Gancho Forged PDFEdFreddy PGarcía100% (1)
- E-050 - RM 406-2018-ViviendaДокумент47 страницE-050 - RM 406-2018-ViviendaJhomaОценок пока нет
- Overlord Vol01 JCДокумент249 страницOverlord Vol01 JCpruebapro132Оценок пока нет
- Uniones de AceroДокумент76 страницUniones de AceroEdFreddy PGarcíaОценок пока нет
- Metrado - Puente Shiraucro 02Документ1 страницаMetrado - Puente Shiraucro 02EdFreddy PGarcíaОценок пока нет
- Roarsa 143082 El RocioДокумент1 страницаRoarsa 143082 El RocioEdFreddy PGarcíaОценок пока нет
- Tema 3-4 Bases de Calculo para Uniones SoldadasДокумент18 страницTema 3-4 Bases de Calculo para Uniones SoldadasEdFreddy PGarcíaОценок пока нет
- Coti - 0100198020 - Oc 19 - 050Документ2 страницыCoti - 0100198020 - Oc 19 - 050EdFreddy PGarcíaОценок пока нет
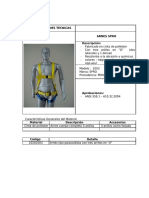
- Arnes 3 Anillos SproДокумент1 страницаArnes 3 Anillos SproEdFreddy PGarcíaОценок пока нет
- Cotizacion 01190 Ink - Proyectos & Ejecuciones Rosy Sac - Proyersac - CM - 19.03.2018Документ1 страницаCotizacion 01190 Ink - Proyectos & Ejecuciones Rosy Sac - Proyersac - CM - 19.03.2018EdFreddy PGarcíaОценок пока нет
- Memoria DescriptivaДокумент23 страницыMemoria DescriptivaAnonymous 9iK0i8h0dPОценок пока нет
- Trabajo Academico - Módulo 2Документ2 страницыTrabajo Academico - Módulo 2mic_srlОценок пока нет
- Bases Nicho Obra 2016 Final 20160901 201317 197Документ64 страницыBases Nicho Obra 2016 Final 20160901 201317 197EdFreddy PGarcíaОценок пока нет
- Apoyos de NeopreneДокумент2 страницыApoyos de NeopreneISAIASHEREDIAОценок пока нет
- Bases de Calculo de Estructuras de AceroДокумент0 страницBases de Calculo de Estructuras de AceroJorge CruzОценок пока нет
- Abrazadera Alta Temperatura (High Temperature Pipe Clamp)Документ1 страницаAbrazadera Alta Temperatura (High Temperature Pipe Clamp)Ing TelloОценок пока нет
- Bases As 0102016MPS 20160831 165330 935Документ59 страницBases As 0102016MPS 20160831 165330 935EdFreddy PGarcíaОценок пока нет
- Curricum Viate SegundoДокумент7 страницCurricum Viate SegundoEdFreddy PGarcíaОценок пока нет
- Tablas Perfiles MetalicosДокумент44 страницыTablas Perfiles MetalicosOmar ST100% (1)
- Memoria PDFДокумент17 страницMemoria PDFLibroEnDigitalОценок пока нет
- CARATULAДокумент1 страницаCARATULAEdFreddy PGarcíaОценок пока нет
- Esquema de ProcedimientosДокумент1 страницаEsquema de ProcedimientosEdFreddy PGarcíaОценок пока нет
- Analisissubpresupuestovarios S02Документ5 страницAnalisissubpresupuestovarios S02EdFreddy PGarcíaОценок пока нет
- PresupuestoДокумент7 страницPresupuestoEdFreddy PGarcíaОценок пока нет
- PresupuestoДокумент2 страницыPresupuestoEdFreddy PGarcíaОценок пока нет
- Norma de Dibujo DINДокумент4 страницыNorma de Dibujo DINEdFreddy PGarcíaОценок пока нет
- Análisis de La Situación de Salud Del Perú 2012 PDFДокумент136 страницAnálisis de La Situación de Salud Del Perú 2012 PDFMarco A. Atoche InoñanОценок пока нет
- La Catedral y El BazarДокумент2 страницыLa Catedral y El BazarRicardo RuizОценок пока нет
- Parcial 01Документ3 страницыParcial 01Alejandro ArandaОценок пока нет
- Crestomatía Un Caleidoscopio Del CalculusДокумент617 страницCrestomatía Un Caleidoscopio Del CalculuskevinОценок пока нет
- Terminación de BuclesДокумент7 страницTerminación de BuclesBrandon SCОценок пока нет
- Metodologías para El Desarrollo de SoftwareДокумент39 страницMetodologías para El Desarrollo de SoftwareLuis Amaro Villanueva TapiaОценок пока нет
- Fibra MultiplexoresДокумент12 страницFibra Multiplexoreswilliam abel taboada gambiniОценок пока нет
- Plan de Medios - Cronograma RedesДокумент30 страницPlan de Medios - Cronograma Redespaunic_Оценок пока нет
- 4 Iica y Catie IicaДокумент8 страниц4 Iica y Catie IicaMiro PVОценок пока нет
- EDOS OTG 2 EjerciciosДокумент20 страницEDOS OTG 2 EjerciciosJeffry Merino PeraltaОценок пока нет
- Ote - 12032018Документ21 страницаOte - 12032018ValsrockОценок пока нет
- Problemas Hallar Las Estrategias Optimas de Cada Jugador 35069 38239Документ22 страницыProblemas Hallar Las Estrategias Optimas de Cada Jugador 35069 38239Kevin Yoshet Cardenas PachecoОценок пока нет
- Abstrac Del Libro Grandes Ideas Grandes NegociosДокумент5 страницAbstrac Del Libro Grandes Ideas Grandes NegociosAndrè Paul BenoitОценок пока нет
- Traspuesta de Una Matrizy DemostracionesДокумент13 страницTraspuesta de Una Matrizy DemostracionesJose FernandezОценок пока нет
- Ent OXE ES DatasheetДокумент9 страницEnt OXE ES DatasheetJack Suarez ZamudioОценок пока нет
- Problemas de BioingenieríaДокумент2 страницыProblemas de BioingenieríaVictor RamirezОценок пока нет
- 3 Manual de Uso Del SbaДокумент19 страниц3 Manual de Uso Del SbaPedro Jadiv OleverОценок пока нет
- ArreglosДокумент5 страницArreglosmarioОценок пока нет
- Letras PonchadoДокумент3 страницыLetras PonchadoAaron LechugaОценок пока нет
- Caso1 TreaДокумент6 страницCaso1 TrearprovichОценок пока нет
- Sistema de Informacion Organizacional Tp1Документ6 страницSistema de Informacion Organizacional Tp1Julieta Herrera67% (6)
- Manual ItemizarДокумент46 страницManual ItemizarjoaquinrojoОценок пока нет
- Aplicación de Las Matrices y Los Determinantes A Los Sistemas de Ecuaciones LinealesДокумент14 страницAplicación de Las Matrices y Los Determinantes A Los Sistemas de Ecuaciones LinealesAndrés Caamal100% (2)
- Como Crear Un Juego en PhaserДокумент19 страницComo Crear Un Juego en PhaserJuanjo Garro AcuñaОценок пока нет
- Definición de Diagramas de Casos de UsoДокумент2 страницыDefinición de Diagramas de Casos de UsoFrancisco MendozaОценок пока нет
- Clase No. 2 Placa Madre o Motherboard PDFДокумент29 страницClase No. 2 Placa Madre o Motherboard PDFRoberto GarciaОценок пока нет
- Guia Bases de DatosДокумент17 страницGuia Bases de DatosKekoYomaОценок пока нет
- Ziegler and NicholsДокумент11 страницZiegler and NicholsJimmy Minaya BenavidesОценок пока нет
- 6 Semana FIEEДокумент68 страниц6 Semana FIEEAbel Isaac Huaytalla CotrinaОценок пока нет
- Base de Datos ProyectoДокумент21 страницаBase de Datos ProyectoGarcía AndresОценок пока нет
- Fenómeno de RungeДокумент109 страницFenómeno de RungeHans Müller Santa CruzОценок пока нет
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másОт EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másРейтинг: 2.5 из 5 звезд2.5/5 (3)
- La causa raiz de los accidentes: Historias de accidentes en la industriaОт EverandLa causa raiz de los accidentes: Historias de accidentes en la industriaРейтинг: 5 из 5 звезд5/5 (1)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadОт EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadРейтинг: 5 из 5 звезд5/5 (1)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónОт EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónРейтинг: 5 из 5 звезд5/5 (1)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.От EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Рейтинг: 5 из 5 звезд5/5 (1)
- Influencia. La psicología de la persuasiónОт EverandInfluencia. La psicología de la persuasiónРейтинг: 4.5 из 5 звезд4.5/5 (14)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.От EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Рейтинг: 4 из 5 звезд4/5 (51)
- EL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialОт EverandEL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialРейтинг: 4.5 из 5 звезд4.5/5 (7)
- Guía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaОт EverandGuía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaРейтинг: 3.5 из 5 звезд3.5/5 (2)
- Manual técnico para la interpretación de análisis de suelos y fertilización de cultivosОт EverandManual técnico para la interpretación de análisis de suelos y fertilización de cultivosРейтинг: 4 из 5 звезд4/5 (1)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenОт EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenРейтинг: 5 из 5 звезд5/5 (8)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialОт EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialРейтинг: 4.5 из 5 звезд4.5/5 (10)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasОт EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasРейтинг: 4.5 из 5 звезд4.5/5 (14)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...От EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Рейтинг: 5 из 5 звезд5/5 (4)
- Inteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaОт EverandInteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaAna Isabel Sánchez DíezРейтинг: 4 из 5 звезд4/5 (3)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaОт EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaРейтинг: 4.5 из 5 звезд4.5/5 (117)
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialОт EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialРейтинг: 4.5 из 5 звезд4.5/5 (11)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesОт EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteОт EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteРейтинг: 1 из 5 звезд1/5 (1)
- El mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosОт EverandEl mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosРейтинг: 5 из 5 звезд5/5 (2)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosОт EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosРейтинг: 4 из 5 звезд4/5 (16)