Вам также может понравиться
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Techniques in Selecting and Organizing InformationДокумент3 страницыTechniques in Selecting and Organizing InformationMylen Noel Elgincolin ManlapazОценок пока нет
- Developing the cycle of maslahah based performance management system implementationДокумент27 страницDeveloping the cycle of maslahah based performance management system implementationM Audito AlfansyahОценок пока нет
- Consumers ' Usage and Adoption of E-Pharmacy in India: Mallika SrivastavaДокумент16 страницConsumers ' Usage and Adoption of E-Pharmacy in India: Mallika SrivastavaSundaravel ElangovanОценок пока нет
- PEDs and InterferenceДокумент28 страницPEDs and Interferencezakool21Оценок пока нет
- Basic Features of The Microcredit Regulatory Authority Act, 2006Документ10 страницBasic Features of The Microcredit Regulatory Authority Act, 2006Asif Hasan DhimanОценок пока нет
- Critical Methodology Analysis: 360' Degree Feedback: Its Role in Employee DevelopmentДокумент3 страницыCritical Methodology Analysis: 360' Degree Feedback: Its Role in Employee DevelopmentJatin KaushikОценок пока нет
- PowerPointHub Student Planner B2hqY8Документ25 страницPowerPointHub Student Planner B2hqY8jersey10kОценок пока нет
- Form 4 Additional Mathematics Revision PatДокумент7 страницForm 4 Additional Mathematics Revision PatJiajia LauОценок пока нет
- AVR Instruction Set Addressing ModesДокумент4 страницыAVR Instruction Set Addressing ModesSundari Devi BodasinghОценок пока нет
- Key Fact Sheet (HBL FreedomAccount) - July 2019 PDFДокумент1 страницаKey Fact Sheet (HBL FreedomAccount) - July 2019 PDFBaD cHaUhDrYОценок пока нет
- Extrajudicial Settlement of Estate Rule 74, Section 1 ChecklistДокумент8 страницExtrajudicial Settlement of Estate Rule 74, Section 1 ChecklistMsyang Ann Corbo DiazОценок пока нет
- Physics Derived Units and Unit Prefixes Derived UnitДокумент15 страницPhysics Derived Units and Unit Prefixes Derived UnitJohnRenzoMolinarОценок пока нет
- Technical Specification of Heat Pumps ElectroluxДокумент9 страницTechnical Specification of Heat Pumps ElectroluxAnonymous LDJnXeОценок пока нет
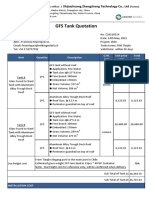
- GFS Tank Quotation C20210514Документ4 страницыGFS Tank Quotation C20210514Francisco ManriquezОценок пока нет
- Composite Structures: A. Grimaldi, A. Sollo, M. Guida, F. MaruloДокумент15 страницComposite Structures: A. Grimaldi, A. Sollo, M. Guida, F. MaruloSharan KharthikОценок пока нет
- Letter From Attorneys General To 3MДокумент5 страницLetter From Attorneys General To 3MHonolulu Star-AdvertiserОценок пока нет
- Longman ESOL Skills For Life - ShoppingДокумент4 страницыLongman ESOL Skills For Life - ShoppingAstri Natalia Permatasari83% (6)
- Dep 32.32.00.11-Custody Transfer Measurement Systems For LiquidДокумент69 страницDep 32.32.00.11-Custody Transfer Measurement Systems For LiquidDAYOОценок пока нет
- Listening Exercise 1Документ1 страницаListening Exercise 1Ma. Luiggie Teresita PerezОценок пока нет
- Assembly ModelingДокумент222 страницыAssembly ModelingjdfdfererОценок пока нет
- Cab&Chaissis ElectricalДокумент323 страницыCab&Chaissis Electricaltipo3331100% (13)
- Aries Computer Repair SolutionsДокумент9 страницAries Computer Repair SolutionsedalzurcОценок пока нет
- Differential Pulse Code ModulationДокумент12 страницDifferential Pulse Code ModulationNarasimhareddy MmkОценок пока нет
- Fast Aldol-Tishchenko ReactionДокумент5 страницFast Aldol-Tishchenko ReactionRSLОценок пока нет
- Anti Jamming of CdmaДокумент10 страницAnti Jamming of CdmaVishnupriya_Ma_4804Оценок пока нет
- Brochure en 2014 Web Canyon Bikes How ToДокумент36 страницBrochure en 2014 Web Canyon Bikes How ToRadivizija PortalОценок пока нет
- Mrs. Universe PH - Empowering Women, Inspiring ChildrenДокумент2 страницыMrs. Universe PH - Empowering Women, Inspiring ChildrenKate PestanasОценок пока нет
- Dance Appreciation and CompositionДокумент1 страницаDance Appreciation and CompositionFretz Ael100% (1)
- List of Reactive Chemicals - Guardian Environmental TechnologiesДокумент69 страницList of Reactive Chemicals - Guardian Environmental TechnologiesGuardian Environmental TechnologiesОценок пока нет
- White Box Testing Techniques: Ratna SanyalДокумент23 страницыWhite Box Testing Techniques: Ratna SanyalYogesh MundhraОценок пока нет