Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Prerequisitos TaumatologiaДокумент7 страницPrerequisitos TaumatologiaBruno De Assis DelboniОценок пока нет
- Candy Evo1482d SДокумент21 страницаCandy Evo1482d SdarkopuОценок пока нет
- A Comprehensive Investigation of Loading Variance Influence On Fuel Consumption and Gas Emissions in Mine Haulage OperationДокумент22 страницыA Comprehensive Investigation of Loading Variance Influence On Fuel Consumption and Gas Emissions in Mine Haulage OperationYvan BravoОценок пока нет
- Materials - 2685 - Study On Effect of CRIMS Data On Warpage Simulation and Possibility of Using Supplement CRIMS DataДокумент49 страницMaterials - 2685 - Study On Effect of CRIMS Data On Warpage Simulation and Possibility of Using Supplement CRIMS Datasandokan_85Оценок пока нет
- Azerbaijan Export Catalogue 2007-2008Документ104 страницыAzerbaijan Export Catalogue 2007-2008nariman4065100% (1)
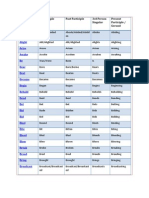
- Abide: Base Form Past Simple Past Participle 3rd Person Singular Present Participle / GerundДокумент9 страницAbide: Base Form Past Simple Past Participle 3rd Person Singular Present Participle / GerundMuhamad Asyraf KamalОценок пока нет
- Preparation of SalicylaldehydeДокумент2 страницыPreparation of Salicylaldehydeashanul haque100% (1)
- Trident Fused Oil Ring Main Unit Up To 15.5kV: Providing Intelligent SolutionsДокумент4 страницыTrident Fused Oil Ring Main Unit Up To 15.5kV: Providing Intelligent SolutionsmealysrОценок пока нет
- Use The Present Simple Tense or The Present Continuous TenseДокумент2 страницыUse The Present Simple Tense or The Present Continuous TenseAna Janceva GluskovaОценок пока нет
- 17 Oct 2018 155344467O52BUVIGPFRДокумент76 страниц17 Oct 2018 155344467O52BUVIGPFRravi patelОценок пока нет
- Deep Sky ObservingДокумент335 страницDeep Sky ObservingAnte100% (3)
- Write An Essay in 11 SentencesДокумент2 страницыWrite An Essay in 11 SentencescoldjippieОценок пока нет
- Assignment 1Документ2 страницыAssignment 1Mohammed BahysmiОценок пока нет
- ENR 1.1 - General RulesДокумент7 страницENR 1.1 - General RulesitsrijoОценок пока нет
- Ycsa 12TДокумент40 страницYcsa 12TdanifonОценок пока нет
- A Activity Hydrology1Документ59 страницA Activity Hydrology1Raymar MacarayanОценок пока нет
- The List of Adjectives Is Something of WonderДокумент29 страницThe List of Adjectives Is Something of WonderMas ZulkarnainОценок пока нет
- CSR ReportДокумент2 страницыCSR ReportKhenith SantosОценок пока нет
- St. Rose College Educational Foundation Inc. Samput Paniqui Tarlac Second Preliminary ExaminationДокумент9 страницSt. Rose College Educational Foundation Inc. Samput Paniqui Tarlac Second Preliminary ExaminationCarl Patrick SantosОценок пока нет
- Dwnload Full Macroeconomics Global Edition 2nd Edition Mishkin Test Bank PDFДокумент36 страницDwnload Full Macroeconomics Global Edition 2nd Edition Mishkin Test Bank PDFAlexisSmithpomtx100% (13)
- Dot Pha Chuyen de Viet Lai Cau Trong Tieng Anh Da Dang Nhat Bai Tap Kem Key 1320386704Документ15 страницDot Pha Chuyen de Viet Lai Cau Trong Tieng Anh Da Dang Nhat Bai Tap Kem Key 1320386704Hoa NhậtОценок пока нет
- All GTs IntroДокумент119 страницAll GTs Introsppram100% (1)
- Meteorology Handout FinalДокумент115 страницMeteorology Handout FinalMehrdadОценок пока нет
- Unit 2 Extension PDFДокумент4 страницыUnit 2 Extension PDFAnonymous ar8kX1Wh9XОценок пока нет
- Electric Overhead Conductor With SelfДокумент1 страницаElectric Overhead Conductor With Selfiorga_alexandruОценок пока нет
- Water Cooled Vacuum CondensersДокумент2 страницыWater Cooled Vacuum CondensersRana Mubbashir IqbalОценок пока нет
- One-Eyed Wind and Where It Came FromДокумент2 страницыOne-Eyed Wind and Where It Came FromDjordje995Оценок пока нет
- Capt. Malik Q&aДокумент25 страницCapt. Malik Q&aAbu Syeed Md. Aurangzeb Al Masum100% (2)
- Đề Ôn THI Trun G Học PHỔ Thôn G Quốc GIAДокумент8 страницĐề Ôn THI Trun G Học PHỔ Thôn G Quốc GIALAI The DatОценок пока нет
- Writing A Commentary Using Literary DevicesДокумент28 страницWriting A Commentary Using Literary DevicesSaadet DagistanliОценок пока нет