Вам также может понравиться
- IRC5 Track Motion 3HEA800970 001Документ96 страницIRC5 Track Motion 3HEA800970 001martinimartiiniОценок пока нет
- 3HXD7109-1 R8Документ88 страниц3HXD7109-1 R8mlucian73Оценок пока нет
- Wabco 1 PDFДокумент192 страницыWabco 1 PDFdottorgt584590% (10)
- Irb 640 - M2000Документ24 страницыIrb 640 - M2000Aivars BajarsОценок пока нет
- SV3X Manipulator ManualДокумент630 страницSV3X Manipulator ManualMushi RodriguezОценок пока нет
- 120405105407SS 497-2011-PreviewДокумент7 страниц120405105407SS 497-2011-PreviewAnonymous NUn6MESx0% (1)
- Mount and Connect Multipole Conductor RailДокумент32 страницыMount and Connect Multipole Conductor RailpikaОценок пока нет
- Rack and Pinion Drive Unite1009Документ34 страницыRack and Pinion Drive Unite1009Tiago HorstmannОценок пока нет
- Battery Trackless Transfer Car: RWP-2T User ManualДокумент16 страницBattery Trackless Transfer Car: RWP-2T User Manualzul isymaОценок пока нет
- 3200-SX Sub-Bottom Profiling System User's Manual (Lo Res)Документ74 страницы3200-SX Sub-Bottom Profiling System User's Manual (Lo Res)Luis David Saenz OrozcoОценок пока нет
- DMPB 9016 eДокумент93 страницыDMPB 9016 eTrungpvmc VanОценок пока нет
- Technical Specifications (MES SPEC - NO.17T6017-SP)Документ80 страницTechnical Specifications (MES SPEC - NO.17T6017-SP)uun jayasaputraОценок пока нет
- Cherry Burrell Processor ManualДокумент48 страницCherry Burrell Processor ManualMadan YadavОценок пока нет
- Moog ServoDrives DS2000 Manual enДокумент142 страницыMoog ServoDrives DS2000 Manual enBojan MarkovićОценок пока нет
- ABB RET 670 Product GuideДокумент107 страницABB RET 670 Product Guiderazvan_nОценок пока нет
- Performance Specification Tie Down, Cargo, Aircraft, Cgu-1/BДокумент14 страницPerformance Specification Tie Down, Cargo, Aircraft, Cgu-1/BDon Bryan GalazОценок пока нет
- LCD Monitor - DC - G2000W - 20070926 - 090339 - Service Manual G2000W - 9J.0CA72.ASx - V01Документ63 страницыLCD Monitor - DC - G2000W - 20070926 - 090339 - Service Manual G2000W - 9J.0CA72.ASx - V01mrruoitrauОценок пока нет
- Axis Technology FCTДокумент324 страницыAxis Technology FCTmihac04Оценок пока нет
- Screw Conveyor O&M ManualДокумент20 страницScrew Conveyor O&M Manualjay b100% (1)
- Protection Relay RE - 610 RE - 610: Installation ManualДокумент48 страницProtection Relay RE - 610 RE - 610: Installation ManualHimdad TahirОценок пока нет
- 02.34 25635-220-3PS-MHCB-00001 Technical PDFДокумент32 страницы02.34 25635-220-3PS-MHCB-00001 Technical PDFEl_memitoОценок пока нет
- Infrastructure Maintenance Vehicle Specific Interface RequirementsДокумент42 страницыInfrastructure Maintenance Vehicle Specific Interface RequirementsIon Logofătu AlbertОценок пока нет
- Android App Controlled Automobile Screw Jack For Light and Heavy TransportДокумент9 страницAndroid App Controlled Automobile Screw Jack For Light and Heavy TransportIJRASETPublicationsОценок пока нет
- Manual EurothermДокумент206 страницManual EurothermluisОценок пока нет
- FANUC Software ArcToolДокумент4 страницыFANUC Software ArcToolIng Dario OrtegaОценок пока нет
- 1mrk505228-Ben A en Product Guide Red670 1.2 Pre-ConfiguredДокумент116 страниц1mrk505228-Ben A en Product Guide Red670 1.2 Pre-Configuredinsan_soft6498Оценок пока нет
- 3 DOF Helicopter - User ManualДокумент23 страницы3 DOF Helicopter - User ManualMurilloMaganОценок пока нет
- ED-247-11 - SupersededДокумент3 страницыED-247-11 - SupersededStevens ElevatorОценок пока нет
- Fast Bus Busbar Systems March 2010Документ34 страницыFast Bus Busbar Systems March 2010Harsha GaviniОценок пока нет
- Specification For Electric Chain Hoists (First Revision of IS 6547)Документ24 страницыSpecification For Electric Chain Hoists (First Revision of IS 6547)Dheeraj ThakurОценок пока нет
- W8LC User GuideДокумент20 страницW8LC User GuidePaulo CatrogaОценок пока нет
- 2097 In002 - en PДокумент8 страниц2097 In002 - en PCarlosOtinianoОценок пока нет
- Owner's Manual For The: JR With H3 Drive Paper Cutter Automation SystemДокумент51 страницаOwner's Manual For The: JR With H3 Drive Paper Cutter Automation SystemSandi PratamaОценок пока нет
- Revised Technical Specifications - MarkedДокумент42 страницыRevised Technical Specifications - MarkedKaren M.Оценок пока нет
- C53000 L1840 C001 03Документ88 страницC53000 L1840 C001 03manirup_tceОценок пока нет
- Manual MotomanДокумент596 страницManual MotomanMarco VargasОценок пока нет
- AESA Catalogue LV 05-05Документ105 страницAESA Catalogue LV 05-05joshyvattakkerry100% (2)
- Nice Robuskit ManualДокумент136 страницNice Robuskit ManualclannadОценок пока нет
- IDU GE3 16x Product DescriptionДокумент105 страницIDU GE3 16x Product DescriptionpapisОценок пока нет
- RE - 5 - Protection, Monitoring and Control: Installation ManualДокумент20 страницRE - 5 - Protection, Monitoring and Control: Installation ManualBata ZivanovicОценок пока нет
- Disclosure To Promote The Right To InformationДокумент68 страницDisclosure To Promote The Right To Informationvb_2009_eeeksОценок пока нет
- TroubleshootingДокумент88 страницTroubleshootingmilekitic2005100% (1)
- MIL-PRF-85046A(AS) Electromechanical Linear Actuator SpecДокумент15 страницMIL-PRF-85046A(AS) Electromechanical Linear Actuator SpecBillОценок пока нет
- Manual de Instalacion de Cono (Chancadora)Документ62 страницыManual de Instalacion de Cono (Chancadora)Dennis Vicente Ayala100% (1)
- Date Tehnice PH 300Документ24 страницыDate Tehnice PH 300bulzacheОценок пока нет
- PGZДокумент401 страницаPGZCosmin IonutОценок пока нет
- ATV303 Modbus Manual en S1A94572 03Документ26 страницATV303 Modbus Manual en S1A94572 03Nguyễn Văn NhậtОценок пока нет
- Crimping Permanent Couplings Using The 136-3642 Crimp Tool Group in Combination and XT Hose Machines1Документ16 страницCrimping Permanent Couplings Using The 136-3642 Crimp Tool Group in Combination and XT Hose Machines1benjir shuvoОценок пока нет
- 1MRK504141-BEN A en Product Guide Transformer Protection RET670 2.0Документ125 страниц1MRK504141-BEN A en Product Guide Transformer Protection RET670 2.0Insan AzizОценок пока нет
- 330, 330 L and 330 LN Excavators 2el00001-Up (Machine) Powered by 3306 Engine (Sebp2198 - 01) - Systems & ComponentsДокумент16 страниц330, 330 L and 330 LN Excavators 2el00001-Up (Machine) Powered by 3306 Engine (Sebp2198 - 01) - Systems & ComponentsRZ Emi100% (1)
- Chipper/Shredder Owner's ManualДокумент24 страницыChipper/Shredder Owner's ManualDaniel Valenzuela ArredondoОценок пока нет
- 7VE6xxx Manual A2 V041003 enДокумент314 страниц7VE6xxx Manual A2 V041003 enArnab DeОценок пока нет
- SJ-20130509142153-001-ZXSDR R8863 (HV1.0) Product Description - 573602Документ35 страницSJ-20130509142153-001-ZXSDR R8863 (HV1.0) Product Description - 573602Nouvric Int100% (1)
- Is 12466 2012 PDFДокумент11 страницIs 12466 2012 PDFlokeshras12Оценок пока нет
- Motor Protection 7SK80xx ManualДокумент482 страницыMotor Protection 7SK80xx Manualmadhan_22Оценок пока нет
- Instructions For The Digitrip RMS 310 3-Pole and 4-PoleДокумент20 страницInstructions For The Digitrip RMS 310 3-Pole and 4-Polepayolin77Оценок пока нет
- Rotary Rototech User ManualДокумент81 страницаRotary Rototech User ManualSakhr Fahd AlnakhlanyОценок пока нет
- SIPROTEC 7VU683 Multi-Function High Speed Motor Bus TransferДокумент184 страницыSIPROTEC 7VU683 Multi-Function High Speed Motor Bus TransferzlarrabeОценок пока нет
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisОт EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisРейтинг: 4 из 5 звезд4/5 (2)
- TLV 1117Документ39 страницTLV 1117borlixОценок пока нет
- 300-Series Gigabit DSДокумент2 страницы300-Series Gigabit DSborlixОценок пока нет
- Gm900 ManualДокумент1 страницаGm900 ManualborlixОценок пока нет
- Polybd Resin UrethanesДокумент22 страницыPolybd Resin UrethanesborlixОценок пока нет
- Rv110w Quick Start enДокумент12 страницRv110w Quick Start enborlixОценок пока нет
- Du Pont Product SelectorДокумент3 страницыDu Pont Product Selectorrps1977Оценок пока нет
- BE-DuPont Teflon PrimersДокумент1 страницаBE-DuPont Teflon PrimersborlixОценок пока нет
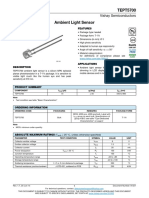
- TEPT5700: Vishay SemiconductorsДокумент5 страницTEPT5700: Vishay SemiconductorsborlixОценок пока нет
- Cable and harnesspackage guideДокумент1 страницаCable and harnesspackage guideborlixОценок пока нет
- AWK Cable Bundle - 6308EN-00Документ2 страницыAWK Cable Bundle - 6308EN-00borlixОценок пока нет
- Siemens Logo-Cmr2020 ManualДокумент154 страницыSiemens Logo-Cmr2020 ManualborlixОценок пока нет
- ABB Compact Flash DSQC656Документ3 страницыABB Compact Flash DSQC656borlixОценок пока нет
- RobotComms ABB V1insightДокумент14 страницRobotComms ABB V1insightborlixОценок пока нет
- Easy Guide To Make Hiren's Bootable USB Flash Drive - Learn Basics of Linux OSДокумент8 страницEasy Guide To Make Hiren's Bootable USB Flash Drive - Learn Basics of Linux OSborlix100% (1)
- Plasticisers enДокумент1 страницаPlasticisers enborlixОценок пока нет
- Manual 3HAC038751-En RevBДокумент32 страницыManual 3HAC038751-En RevBborlixОценок пока нет
- RufusДокумент3 страницыRufusborlixОценок пока нет
- Flyer Feelwood enДокумент2 страницыFlyer Feelwood enborlixОценок пока нет
- Basf Roofing EngДокумент12 страницBasf Roofing EngborlixОценок пока нет
- Supersoft Flyer en NCIДокумент2 страницыSupersoft Flyer en NCIborlixОценок пока нет
- Floppy Drive Emulator 2 - Floppy To USB - Floppy Drive To USBДокумент5 страницFloppy Drive Emulator 2 - Floppy To USB - Floppy Drive To USBborlixОценок пока нет
- CosyPUR Flyer Visco en NCIДокумент2 страницыCosyPUR Flyer Visco en NCIborlixОценок пока нет
- Elastoflex W enДокумент2 страницыElastoflex W enborlixОценок пока нет
- Footwear 01 2010Документ6 страницFootwear 01 2010borlixОценок пока нет
- ABB S3 IRB1600 3HAC023637-001 Procedures Rev - enДокумент184 страницыABB S3 IRB1600 3HAC023637-001 Procedures Rev - enSebastian OpreaОценок пока нет
- Footwearnews 0108Документ6 страницFootwearnews 0108borlixОценок пока нет
- Introduction To RAPID 3HAC029364-001 Rev - enДокумент56 страницIntroduction To RAPID 3HAC029364-001 Rev - enAvi KorenОценок пока нет
- 01 Direct AC-AC ConvertersДокумент12 страниц01 Direct AC-AC ConvertersborlixОценок пока нет
- Module 1.1 - Introduction To RCDДокумент34 страницыModule 1.1 - Introduction To RCDDopias FakeОценок пока нет
- Structural Analysis and Design of A Warehouse BuildingДокумент93 страницыStructural Analysis and Design of A Warehouse BuildingAnonymous vofwBP2p5Оценок пока нет
- Method Statement For PilingДокумент13 страницMethod Statement For Pilingfree4bruce100% (1)
- HD 16-EДокумент44 страницыHD 16-EAmelaОценок пока нет
- Numerical and Experimental Study of Vibration Mitigation For Highway Light PolesДокумент11 страницNumerical and Experimental Study of Vibration Mitigation For Highway Light Poleszfk1982Оценок пока нет
- GP 43 28 Pipeline CrossingsДокумент15 страницGP 43 28 Pipeline CrossingsazamshafiqОценок пока нет
- The Study Through Models of Reinforced Concrete Beams Failing in Shear PDFДокумент96 страницThe Study Through Models of Reinforced Concrete Beams Failing in Shear PDFMuhammadWazimAkramОценок пока нет
- LR Sloshing Assessment Guidance Document Form Membrane Tank LNG Operations (V2 0) May 2009Документ106 страницLR Sloshing Assessment Guidance Document Form Membrane Tank LNG Operations (V2 0) May 2009Archie SmileyОценок пока нет
- Ncma Tek: Empirical Design of Concrete Masonry Walls TEK 14-8AДокумент6 страницNcma Tek: Empirical Design of Concrete Masonry Walls TEK 14-8Ashamimzubery1969Оценок пока нет
- Reinforced Concrete Basics of Design PDFДокумент45 страницReinforced Concrete Basics of Design PDFJorge Mauricio de SouzaОценок пока нет
- Nfpa 1932Документ13 страницNfpa 1932Thinagaran N ManiamОценок пока нет
- Design of Welded Steel Plate GirdersДокумент87 страницDesign of Welded Steel Plate GirdersHoran Malik100% (1)
- An Improvement On The Soboyejo and Nigerian Meteorological Agency Wind Isopleths MapsДокумент8 страницAn Improvement On The Soboyejo and Nigerian Meteorological Agency Wind Isopleths MapsSteven JonesОценок пока нет
- Ms For Plate Load Test Rev1Документ6 страницMs For Plate Load Test Rev1FOZCANОценок пока нет
- Eurocode 7 Geotechnical Limit AnalysisДокумент61 страницаEurocode 7 Geotechnical Limit AnalysisKathirgamanathan SivanathanОценок пока нет
- Boxspan Residential Span TablesДокумент36 страницBoxspan Residential Span TablesÁngel Raúl DipierroОценок пока нет
- GTT NO96 LNG TanksДокумент5 страницGTT NO96 LNG TanksEdutamОценок пока нет
- Specifying Windows and Doors Using Performance StandardsДокумент78 страницSpecifying Windows and Doors Using Performance StandardsghadasaudiОценок пока нет
- Recent Enhancements - SAP2000Документ44 страницыRecent Enhancements - SAP2000Nazim KASSABОценок пока нет
- Eurocode 4 1 1 1994 ENДокумент161 страницаEurocode 4 1 1 1994 ENShanmuga Sundaram100% (2)
- Seismic Weight Calculations For EarthquakeДокумент4 страницыSeismic Weight Calculations For EarthquakePrashant SunagarОценок пока нет
- Leading Integrated Bridge Design Software - IBDASДокумент12 страницLeading Integrated Bridge Design Software - IBDASChun Fai ChoОценок пока нет
- Agricultural Buildings Designed To BS 5502-22Документ3 страницыAgricultural Buildings Designed To BS 5502-22fОценок пока нет
- Structural Design and Erection: General RequirementsДокумент15 страницStructural Design and Erection: General RequirementsMKPashaPashaОценок пока нет
- Exams CT3330 2004-2010Документ165 страницExams CT3330 2004-2010Ruben Rodriguez PargaОценок пока нет
- C-857-14 Minimum Design Loading PDFДокумент6 страницC-857-14 Minimum Design Loading PDFMichael VanWagenenОценок пока нет
- RCCДокумент16 страницRCCSyed Sirajul HaqОценок пока нет
- Polymer Post Insulators For 46 To 500kV Applications: CatalogДокумент23 страницыPolymer Post Insulators For 46 To 500kV Applications: CatalogHFandino1Оценок пока нет
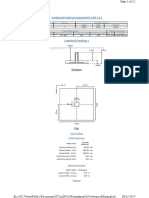
- Isolated Footing Design (ACI 318-11) : ElevationДокумент12 страницIsolated Footing Design (ACI 318-11) : ElevationAhmed Ben HmidaОценок пока нет
- Guide To Tower CranesДокумент10 страницGuide To Tower CranesArisОценок пока нет