Вам также может понравиться
- Differential Transformation Method for Mechanical Engineering ProblemsОт EverandDifferential Transformation Method for Mechanical Engineering ProblemsОценок пока нет
- ME FinalДокумент81 страницаME FinalAnkit DahiyaОценок пока нет
- Answers Should Be Written in QCAB Format Only.: InstructionsДокумент81 страницаAnswers Should Be Written in QCAB Format Only.: InstructionsSandeep PrajapatiОценок пока нет
- Governor PDFДокумент94 страницыGovernor PDFmudit verma0% (1)
- Spur Gear For I PДокумент40 страницSpur Gear For I PVenkatagiri Srinivas MurthyОценок пока нет
- Chapter 5 SensorsДокумент46 страницChapter 5 SensorsKetul ShahОценок пока нет
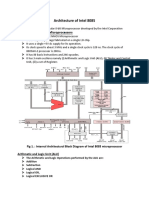
- Intel 8085 ArchitectureДокумент8 страницIntel 8085 ArchitectureAravind VJОценок пока нет
- ME PAPER 2sdadfasfДокумент72 страницыME PAPER 2sdadfasfRanga SriОценок пока нет
- Second Yr Student Achievements PDFДокумент7 страницSecond Yr Student Achievements PDFmachha shyam shankerОценок пока нет
- ME 112 Engineering Drawing: Introduction To Drawing Practice Basics of LetteringДокумент167 страницME 112 Engineering Drawing: Introduction To Drawing Practice Basics of Letteringruya mОценок пока нет
- A Report On "Summer Internship" at M&B Footwear (P) Ltd. A Project Report OnДокумент79 страницA Report On "Summer Internship" at M&B Footwear (P) Ltd. A Project Report OnNeha NigamОценок пока нет
- Answers Should Be Written in QCAB Format Only.: InstructionsДокумент70 страницAnswers Should Be Written in QCAB Format Only.: InstructionsLuffyОценок пока нет
- Electroslag Welding: Electroslag Welding (ESW) Is A Highly Productive, Single PassДокумент2 страницыElectroslag Welding: Electroslag Welding (ESW) Is A Highly Productive, Single PassStefanie WilsonОценок пока нет
- High Energy Rate Forming ProcessДокумент8 страницHigh Energy Rate Forming Processjasonmani90Оценок пока нет
- Solar Collector and Measuring DevicesДокумент39 страницSolar Collector and Measuring DevicesNisha JagdishОценок пока нет
- Flate Plate CollectorДокумент45 страницFlate Plate CollectorSunil PandeyОценок пока нет
- Interview Preparation For Ese PDFДокумент6 страницInterview Preparation For Ese PDFkailashОценок пока нет
- Major Project Report On AjmДокумент45 страницMajor Project Report On AjmAwesm Rishu100% (3)
- Solar CollectorsДокумент64 страницыSolar CollectorsUponika Barman RoyОценок пока нет
- Answers Should Be Written in QCAB Format Only.: InstructionsДокумент70 страницAnswers Should Be Written in QCAB Format Only.: InstructionsSandeep PrajapatiОценок пока нет
- Imeche Design Challenge 2016 SpecificationДокумент13 страницImeche Design Challenge 2016 Specificationfariborz_136Оценок пока нет
- High Energy Rate Forming ProcessesДокумент47 страницHigh Energy Rate Forming ProcessesArun SrivastanОценок пока нет
- 1.0 Fundamentals of Machining (A)Документ55 страниц1.0 Fundamentals of Machining (A)Loo Tong ShianОценок пока нет
- Aim of The Experiment Design and Implementation of A 16 Bit Program CounterДокумент13 страницAim of The Experiment Design and Implementation of A 16 Bit Program CounterAmogh VrОценок пока нет
- Joining Processes: Permanent JointsДокумент31 страницаJoining Processes: Permanent JointsgemnikkicОценок пока нет
- Dom Unit II Imp QuestionsДокумент2 страницыDom Unit II Imp QuestionsSree MurthyОценок пока нет
- AT6501 (R-13) Notes PDFДокумент131 страницаAT6501 (R-13) Notes PDFAashiq NawinОценок пока нет
- Phenomenon of KnockingДокумент30 страницPhenomenon of KnockingTrain Placement Cell67% (3)
- Open DifferentialДокумент7 страницOpen DifferentialMikael Bezerra Cotias Dos SantosОценок пока нет
- Governor NotesДокумент19 страницGovernor NotesSailesh Bastol100% (2)
- SolarДокумент13 страницSolarVinay Maisuriya0% (1)
- Unit 4 Balancingofrotatingmasses 131127012048 Phpapp01Документ53 страницыUnit 4 Balancingofrotatingmasses 131127012048 Phpapp01adarsh pushpan100% (1)
- Position TolerancesДокумент79 страницPosition TolerancesNithya PeterОценок пока нет
- MD-18 Power Screws PDFДокумент4 страницыMD-18 Power Screws PDFjmartinezmoОценок пока нет
- Answers Should Be Written in QCAB Format Only.: InstructionsДокумент87 страницAnswers Should Be Written in QCAB Format Only.: InstructionsSandeep PrajapatiОценок пока нет
- Reciprocating Type Machine ToolsДокумент18 страницReciprocating Type Machine ToolsSpartan 117Оценок пока нет
- Boundary Layer ThicknessДокумент23 страницыBoundary Layer ThicknessPridhar ThiagarajanОценок пока нет
- Unit 1. Fundamentals of Design Master b5Документ20 страницUnit 1. Fundamentals of Design Master b5S VОценок пока нет
- Types, Components & Working Principles of Internal Combustion EnginesДокумент41 страницаTypes, Components & Working Principles of Internal Combustion EnginesNauman QureshiОценок пока нет
- Theory of MachinesДокумент6 страницTheory of MachinesYogesh DandekarОценок пока нет
- PPC Loading and SchedulingДокумент11 страницPPC Loading and SchedulingHarshwardhan PhatakОценок пока нет
- MMAM (21ME54), Assignment-2., 2023-24Документ1 страницаMMAM (21ME54), Assignment-2., 2023-24pranamnathanielrajОценок пока нет
- Introduction To Design of Machine ElementsДокумент11 страницIntroduction To Design of Machine Elementssakali aliОценок пока нет
- Ray Diagram Kinematic LayoutДокумент4 страницыRay Diagram Kinematic Layoutvijayakumar0% (1)
- Rocket PropellantДокумент19 страницRocket PropellantsuryaОценок пока нет
- Qip Ice 31 Stirling EnginesДокумент20 страницQip Ice 31 Stirling EnginesChetanPrajapatiОценок пока нет
- Machining Time and Power EstimationДокумент50 страницMachining Time and Power EstimationGnanakumar GanesanОценок пока нет
- Turbo MachinesДокумент75 страницTurbo Machinesyash_ganatra67% (3)
- Me 8513 MM Lab 2022 OddДокумент63 страницыMe 8513 MM Lab 2022 OddVelan PrintersОценок пока нет
- MTD - Metallurgical Thermo Dynamics9 R H Tupkary PDFДокумент208 страницMTD - Metallurgical Thermo Dynamics9 R H Tupkary PDFkgmmetОценок пока нет
- Module 5 Design of Components With Forging ConsiderationДокумент34 страницыModule 5 Design of Components With Forging ConsiderationMaheshОценок пока нет
- Planer Quick Return MechanismДокумент21 страницаPlaner Quick Return MechanismchristadcrОценок пока нет
- Theory of Machines PDFДокумент53 страницыTheory of Machines PDFShanmukha SundaramОценок пока нет
- ForgingДокумент54 страницыForgingMaheshОценок пока нет
- KINEMATICS OF MACHINERY: UNIT 2: VELOCITY & ACCELARATION: Objective Questions From Gate With SolutionsДокумент7 страницKINEMATICS OF MACHINERY: UNIT 2: VELOCITY & ACCELARATION: Objective Questions From Gate With SolutionsVenkateswar Reddy MallepallyОценок пока нет
- 28 Patriotic Bollywood Movies - Top Hindi Desh Bhakti Films PDFДокумент14 страниц28 Patriotic Bollywood Movies - Top Hindi Desh Bhakti Films PDFsukushОценок пока нет
- Rankine CycleДокумент11 страницRankine CyclePedro Perez Prado100% (1)
- Unit 2 PPT DOM 3.9.21Документ27 страницUnit 2 PPT DOM 3.9.21MURALI KRISHNAN RОценок пока нет
- Experiment No: 04 Experiment Name: Study and Observation of Compression Test of A HelicalДокумент5 страницExperiment No: 04 Experiment Name: Study and Observation of Compression Test of A Helicalmd.Aktaruzzaman aktarОценок пока нет
- Unit 5 Balancing of Reciprocating MassesДокумент43 страницыUnit 5 Balancing of Reciprocating MassesNAVEENОценок пока нет
- Failuer Analysis Crankshaft in Diesel LocomotiveДокумент74 страницыFailuer Analysis Crankshaft in Diesel LocomotivePankajBhamareОценок пока нет
- Francis - Engine Dynamics and Structural VibrationДокумент19 страницFrancis - Engine Dynamics and Structural VibrationPankajBhamareОценок пока нет
- Chapter 7 Balancing of LinkagesДокумент21 страницаChapter 7 Balancing of LinkagesRajeev MisraОценок пока нет
- Balancing of Rotating and Reciprocating Systems in EngineДокумент12 страницBalancing of Rotating and Reciprocating Systems in EngineNeacsu EugenОценок пока нет
- Balancing TheoryДокумент181 страницаBalancing TheoryDANE8083% (6)
- Basics of Balancing 202Документ28 страницBasics of Balancing 202PankajBhamareОценок пока нет
- Engine BalancingДокумент29 страницEngine BalancingqingcaoheОценок пока нет
- Paper - Latest Developments in Online Oil Condition Monitoring SensorsДокумент18 страницPaper - Latest Developments in Online Oil Condition Monitoring SensorsPankajBhamareОценок пока нет
- CrankshaftДокумент11 страницCrankshaftPankajBhamareОценок пока нет
- ACC ECU Maps Color CodedДокумент8 страницACC ECU Maps Color CodedMarcello AssunçãoОценок пока нет
- 660III ImprovementsДокумент20 страниц660III Improvementsaugusto100% (1)
- Catalogo Crow RuedasДокумент42 страницыCatalogo Crow RuedasJose Alb. FernandezОценок пока нет
- 2018 Buick Lacrosse Owners ManualДокумент362 страницы2018 Buick Lacrosse Owners ManualJohn HundleyОценок пока нет
- New Venue Price ListДокумент1 страницаNew Venue Price ListSudheer KumarОценок пока нет
- 4053722-Arctic Cat Atv 2007 All Models Repair Manual ImprovedДокумент472 страницы4053722-Arctic Cat Atv 2007 All Models Repair Manual Improvedmcrepairusa100% (2)
- z1000 Owner ManualДокумент188 страницz1000 Owner ManualchaehoiОценок пока нет
- Fiat Palio Weekend Workshop Manual: Read/DownloadДокумент2 страницыFiat Palio Weekend Workshop Manual: Read/DownloadAnonymous njLiXS100% (2)
- FL 70 Business Class Trucks Driver's ManualДокумент248 страницFL 70 Business Class Trucks Driver's ManualMarlon Montenegro80% (5)
- MST-Manual 19121735 PDFДокумент101 страницаMST-Manual 19121735 PDFRolando Vera75% (4)
- 2012 Polaris Service Manual Chapter 07Документ50 страниц2012 Polaris Service Manual Chapter 07Talleres Marcelo Briozzo0% (1)
- Service Manual VDT 12000 Maint Section PDFДокумент29 страницService Manual VDT 12000 Maint Section PDFweldsaidi100% (1)
- Workshop Manual Octavia Engine Fuel Injection 1.9tdiДокумент194 страницыWorkshop Manual Octavia Engine Fuel Injection 1.9tdirui trigo100% (2)
- Otto CycleДокумент7 страницOtto CycleNitesh MondalОценок пока нет
- AJS Geared Motorcycle Maintenance Operation ManualДокумент2 страницыAJS Geared Motorcycle Maintenance Operation ManualJoe SmithОценок пока нет
- Katalog Carraro Drive Axle PDFДокумент13 страницKatalog Carraro Drive Axle PDFEdin HadzicОценок пока нет
- 6000 Series Powershift Transmission PDFДокумент2 страницы6000 Series Powershift Transmission PDFIamandei Elena100% (1)
- Toyota 7M Manual Engine enДокумент92 страницыToyota 7M Manual Engine enBerny GarciaОценок пока нет
- Component LocationДокумент2 страницыComponent LocationLuis Antonio FuentesОценок пока нет
- Yamaha Fazer User Owner Manual FZ6SHG 2008 PDFДокумент96 страницYamaha Fazer User Owner Manual FZ6SHG 2008 PDFRobert NadeauОценок пока нет
- SB-11-001 Exhaust Manifold Stud Modification. J05 EnginesДокумент4 страницыSB-11-001 Exhaust Manifold Stud Modification. J05 EnginesPhil B.Оценок пока нет
- Opel Astra Fuse BoxДокумент2 страницыOpel Astra Fuse BoxDragos Bacioiu50% (2)
- Motomariner 0rice ListДокумент14 страницMotomariner 0rice Listmatej1992Оценок пока нет
- Sebp3706 40 02 Allcd - 200 PDFДокумент767 страницSebp3706 40 02 Allcd - 200 PDFCtesa WagnerОценок пока нет
- AGILITY50 Cap 03 (Manutenzione)Документ12 страницAGILITY50 Cap 03 (Manutenzione)api-3759317100% (2)
- Capacidad de Llenado 236D MPW PDFДокумент4 страницыCapacidad de Llenado 236D MPW PDFandreina nuñezОценок пока нет
- T5 Pin Connector Assignments Selected Connections PDFДокумент10 страницT5 Pin Connector Assignments Selected Connections PDFSasa MitrovicОценок пока нет
- Injection Pump Test SpecificationsДокумент2 страницыInjection Pump Test SpecificationsEdinson Ariel Chavarro QuinteroОценок пока нет
- Automatic Hand Brake and Head Light AllignmentДокумент15 страницAutomatic Hand Brake and Head Light AllignmentMectrosoft Creative technologyОценок пока нет
- Gol/Parati/Saveiro No. 140 / 1Документ17 страницGol/Parati/Saveiro No. 140 / 1Igmar Franco NegreteОценок пока нет
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialОт EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialРейтинг: 3.5 из 5 звезд3.5/5 (3)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeОт EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeРейтинг: 4.5 из 5 звезд4.5/5 (9)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosОт EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosРейтинг: 5 из 5 звезд5/5 (1)
- Analog Design and Simulation Using OrCAD Capture and PSpiceОт EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceОценок пока нет
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesОт EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesРейтинг: 5 из 5 звезд5/5 (1)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonОт EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonРейтинг: 5 из 5 звезд5/5 (2)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionОт EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionРейтинг: 4.5 из 5 звезд4.5/5 (543)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsОт EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsРейтинг: 3.5 из 5 звезд3.5/5 (2)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)От EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Рейтинг: 4.5 из 5 звезд4.5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesОт EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesРейтинг: 5 из 5 звезд5/5 (1)
- Wearable Sensors: Fundamentals, Implementation and ApplicationsОт EverandWearable Sensors: Fundamentals, Implementation and ApplicationsEdward SazonovОценок пока нет
- Practical Electronics for Inventors, Fourth EditionОт EverandPractical Electronics for Inventors, Fourth EditionРейтинг: 4 из 5 звезд4/5 (3)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)От EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)Оценок пока нет
- Build Your Own Electric Vehicle, Third EditionОт EverandBuild Your Own Electric Vehicle, Third EditionРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Understanding Automotive Electronics: An Engineering PerspectiveОт EverandUnderstanding Automotive Electronics: An Engineering PerspectiveРейтинг: 3.5 из 5 звезд3.5/5 (16)
- Teach Yourself Electricity and Electronics, 6th EditionОт EverandTeach Yourself Electricity and Electronics, 6th EditionРейтинг: 3.5 из 5 звезд3.5/5 (15)