Вам также может понравиться
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportОт EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportОценок пока нет
- Oupa Nhambe - Control Project Part 2Документ19 страницOupa Nhambe - Control Project Part 2Oupa100% (4)
- Process Dynamics and Control Exam QuestionsДокумент9 страницProcess Dynamics and Control Exam Questionsbhaskar537750% (2)
- Simulink TutorialДокумент18 страницSimulink TutorialcarthikvenkataramanОценок пока нет
- Assignment-2 QuestionsДокумент4 страницыAssignment-2 Questionsf20212587Оценок пока нет
- Modeling of The Modified Quadruple-Tank Process: A. Numsomran, V. Tipsuwanporn, K. TirasesthДокумент6 страницModeling of The Modified Quadruple-Tank Process: A. Numsomran, V. Tipsuwanporn, K. Tirasesthanon_369320474Оценок пока нет
- Ch26b Midterm 2002Документ7 страницCh26b Midterm 2002Nguyễn Tiến DũngОценок пока нет
- Gujarat Technological University: InstructionsДокумент2 страницыGujarat Technological University: InstructionsBhakti MahbubaniОценок пока нет
- Matlab Ex ModelsДокумент9 страницMatlab Ex ModelsNicolas RinconОценок пока нет
- Coupled TankДокумент5 страницCoupled TankDevraj MandalОценок пока нет
- Tutorial 6 (Questions)Документ4 страницыTutorial 6 (Questions)Sabrina Azhar0% (1)
- Control Homework Stability State-Space ModelsДокумент7 страницControl Homework Stability State-Space ModelskatelynОценок пока нет
- T2Документ3 страницыT2Kiran Jot SinghОценок пока нет
- PCT 301T ModelingДокумент21 страницаPCT 301T ModelingPortia ShilengeОценок пока нет
- Lab 3Документ12 страницLab 3Madhumita KumarОценок пока нет
- CBE 162 - Homework 6Документ2 страницыCBE 162 - Homework 6KevinОценок пока нет
- Computer Science Textbook Solutions - 32Документ7 страницComputer Science Textbook Solutions - 32acc-expertОценок пока нет
- Homework 5 Part (A) Write The Differential Equation(s) of Motion For The Following SystemДокумент3 страницыHomework 5 Part (A) Write The Differential Equation(s) of Motion For The Following Systemgunawan refiadiОценок пока нет
- Time Domain Representation of Linear Time Invariant (LTI) SystemsДокумент54 страницыTime Domain Representation of Linear Time Invariant (LTI) SystemsLai Yon PengОценок пока нет
- 10 Simulink PDFДокумент32 страницы10 Simulink PDFAugusto De La Cruz Camayo100% (1)
- Tank Level Control Simulation and PID Controller DesignДокумент5 страницTank Level Control Simulation and PID Controller DesignSimon CalloОценок пока нет
- Control Engineering Final Part 3 28 Feb 2011Документ18 страницControl Engineering Final Part 3 28 Feb 2011Mohamed AbdullaОценок пока нет
- Control Tank Level Temperature MatlabДокумент175 страницControl Tank Level Temperature MatlabKnv ChaitanyaОценок пока нет
- Dynamic Behavior of More General SystemsДокумент32 страницыDynamic Behavior of More General Systemsjasonbkyle9108Оценок пока нет
- Cee5324 hw3 sp12 PDFДокумент2 страницыCee5324 hw3 sp12 PDFabimanaОценок пока нет
- ch26b Final Exam 2000Документ7 страницch26b Final Exam 2000Nguyễn Tiến DũngОценок пока нет
- Systems of Differential EquationsДокумент69 страницSystems of Differential EquationsPeter Ndung'u100% (1)
- Robust Control Computer Session IIДокумент2 страницыRobust Control Computer Session IIcarlogarroОценок пока нет
- Test2 Skee3133 SolutionДокумент10 страницTest2 Skee3133 SolutionfrazatasОценок пока нет
- Sample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Документ8 страницSample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Priyesh PandeyОценок пока нет
- State Variable ModelsДокумент13 страницState Variable Modelsali alaaОценок пока нет
- Stochastic State Estimation of A Multivariable Process Using Unscented Kalman FiltersДокумент10 страницStochastic State Estimation of A Multivariable Process Using Unscented Kalman FiltersAraouf GaaloulОценок пока нет
- System Modeling in Time DomainДокумент74 страницыSystem Modeling in Time DomainSanji KarunaОценок пока нет
- B. Tech Control SystemsДокумент2 страницыB. Tech Control SystemsAnant VermaОценок пока нет
- Convection Experiment: Leader: Tom Salerno Partners: Greg Rothsching Stephen Johnson Jen DiroccoДокумент19 страницConvection Experiment: Leader: Tom Salerno Partners: Greg Rothsching Stephen Johnson Jen DirocconazhakimОценок пока нет
- Tutorial 11Документ5 страницTutorial 11Aakash R RajwaniОценок пока нет
- (Ebook) Multivariable Control, An Introduction PDFДокумент14 страниц(Ebook) Multivariable Control, An Introduction PDFCaterine Feria RamirezОценок пока нет
- Lab Experiment 8: Effect of Feedback On Disturbance & Control System Design ObjectiveДокумент3 страницыLab Experiment 8: Effect of Feedback On Disturbance & Control System Design ObjectiveKei DeeОценок пока нет
- Solving Ordinary Differential Equations Using Numerical MethodsДокумент5 страницSolving Ordinary Differential Equations Using Numerical MethodsmasterrkОценок пока нет
- Matlab, Simulink - Control Systems Simulation Using Matlab and SimulinkДокумент10 страницMatlab, Simulink - Control Systems Simulation Using Matlab and SimulinkTarkes DoraОценок пока нет
- Assiut University Automatic Control Final Exam QuestionsДокумент3 страницыAssiut University Automatic Control Final Exam QuestionsEngAbdallahMohamedОценок пока нет
- Basic Integrated Modelling: A Case Study: Mario E. Salgado and Diego R. OyarzúnДокумент15 страницBasic Integrated Modelling: A Case Study: Mario E. Salgado and Diego R. Oyarzúnñ=?!2Оценок пока нет
- Fluid Mechanics Exam: Forces, Flow Rates, Bernoulli's EquationДокумент5 страницFluid Mechanics Exam: Forces, Flow Rates, Bernoulli's EquationismailsakrОценок пока нет
- Gate 2003 PDFДокумент20 страницGate 2003 PDFVammsy Manikanta SaiОценок пока нет
- acs_2013s1_assn1Документ6 страницacs_2013s1_assn1MiraelОценок пока нет
- 6415vlsi01 PDFДокумент13 страниц6415vlsi01 PDFAnonymous e4UpOQEPОценок пока нет
- Interacting and Non-Interacting SystemsДокумент17 страницInteracting and Non-Interacting SystemsjanurangОценок пока нет
- AAOC C321 Control Systems Compre PaperДокумент5 страницAAOC C321 Control Systems Compre PaperTushar GuptaОценок пока нет
- Sinusoidal Response of Second-Order SystemsДокумент15 страницSinusoidal Response of Second-Order SystemsManidhar ThulaОценок пока нет
- Worksheet 2Документ5 страницWorksheet 2Theødřøš ÄbОценок пока нет
- Design of PID Controller For The Modified Quadruple-Tank Process Using Inverted Decoupling TechniqueДокумент5 страницDesign of PID Controller For The Modified Quadruple-Tank Process Using Inverted Decoupling TechniqueMAURY SEBASTIAN MACIAS SANCHEZОценок пока нет
- Chemical: List I List IIДокумент6 страницChemical: List I List IISudhanshu PandeyОценок пока нет
- CHE 426 Assignment Transient ResponseДокумент8 страницCHE 426 Assignment Transient ResponseFarid SarrafОценок пока нет
- LDCS QuestionsДокумент10 страницLDCS QuestionsRiya SinghОценок пока нет
- 07a80805 OptimizationofchemicalprocessesДокумент8 страниц07a80805 OptimizationofchemicalprocessesSharanya ThirichinapalliОценок пока нет
- Numerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityОт EverandNumerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityОценок пока нет
- Discrete Event Systems in Dioid Algebra and Conventional AlgebraОт EverandDiscrete Event Systems in Dioid Algebra and Conventional AlgebraОценок пока нет
- Mathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsОт EverandMathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsRoderick MelnikОценок пока нет
- JACOBS Flare KO Drum SizingДокумент35 страницJACOBS Flare KO Drum SizingVan Le50% (2)
- Volumetric Flow Rate MeasurementДокумент12 страницVolumetric Flow Rate Measurementwhoelse_i40% (5)
- Mebc CH 1 Questions of GtuДокумент3 страницыMebc CH 1 Questions of GtuDeep Khunt100% (1)
- Impack of JetДокумент13 страницImpack of JetKevin Devastian100% (1)
- API 521 Flare Knockout Drum SizingДокумент35 страницAPI 521 Flare Knockout Drum Sizingnghiemta1892% (13)
- FLOWДокумент31 страницаFLOWHassan HaiderОценок пока нет
- PVTSim For Beginners - 1551168101Документ17 страницPVTSim For Beginners - 1551168101Paolo Contenti100% (2)
- Airofoil CalculationДокумент7 страницAirofoil CalculationlightsonsОценок пока нет
- Cooling Tower 6MWДокумент6 страницCooling Tower 6MWtedfdfeОценок пока нет
- An Experience With CFBC Boiler Tube FailuresДокумент61 страницаAn Experience With CFBC Boiler Tube Failuresparthi20065768100% (2)
- Cibse Variable Flow DPCV CPDДокумент44 страницыCibse Variable Flow DPCV CPDmannu11Оценок пока нет
- Volumetric Flow Rate - WikipediaДокумент3 страницыVolumetric Flow Rate - WikipediaJayson S. VerdeflorОценок пока нет
- Sprinkler System FormulasДокумент2 страницыSprinkler System Formulasturbosri_mech100% (1)
- Equation of Continuity Grade 11 - Simulation AnswersДокумент2 страницыEquation of Continuity Grade 11 - Simulation AnswersnoОценок пока нет
- WS2H Control Valve Manual AC Adapter Wiring DiagramДокумент36 страницWS2H Control Valve Manual AC Adapter Wiring Diagramalain grichtingОценок пока нет
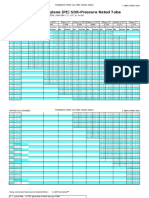
- Polyethylene (PE) SDR-Pressure Rated Tube: Friction Loss CharacteristicsДокумент24 страницыPolyethylene (PE) SDR-Pressure Rated Tube: Friction Loss CharacteristicsqastroqОценок пока нет
- CIH EXAM Equations 2020 Explained by Expert Dr. Daniel FarcasДокумент36 страницCIH EXAM Equations 2020 Explained by Expert Dr. Daniel FarcasDaniel FarcasОценок пока нет
- Topic 6 Reynolds Transport Theorem, Control Volume ApproachДокумент41 страницаTopic 6 Reynolds Transport Theorem, Control Volume ApproachMerwin Andrew UyОценок пока нет
- Erosional Velocity Limitations For Oil and Gas Wells - Extracted From Neotec Wellflow ManualДокумент7 страницErosional Velocity Limitations For Oil and Gas Wells - Extracted From Neotec Wellflow ManualAllan Troy Salazar100% (3)
- AtriumCalcReport V 1 1aДокумент26 страницAtriumCalcReport V 1 1aJeff Anderson CollinsОценок пока нет
- Fluids Lab Venturi Meter - 4Документ5 страницFluids Lab Venturi Meter - 4augur886Оценок пока нет
- Flow Rate and Percentage Word ProblemsДокумент15 страницFlow Rate and Percentage Word ProblemsEmelita D. PeligonesОценок пока нет
- Design and Optimization of Modular Production System Distribution and Pick & Place StationДокумент9 страницDesign and Optimization of Modular Production System Distribution and Pick & Place StationInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Circulating Lubrication Systems Oil PDFДокумент8 страницCirculating Lubrication Systems Oil PDFmadan mohan kattaОценок пока нет
- CH 04Документ22 страницыCH 04kimОценок пока нет
- Consolidated - Catalog SRV 1 Valve SizingДокумент28 страницConsolidated - Catalog SRV 1 Valve SizingYang Gul LeeОценок пока нет
- CH Engineering Interview Questions Answers GuideДокумент25 страницCH Engineering Interview Questions Answers Guidejk100% (1)
- ISO 8316-1997 - (Measurement of Liquid Flow in Closed Conduits - Method by Collection of The Liquid in A Volumetric Tank)Документ32 страницыISO 8316-1997 - (Measurement of Liquid Flow in Closed Conduits - Method by Collection of The Liquid in A Volumetric Tank)empanadaОценок пока нет
- Lab Manual Impact of A JetДокумент6 страницLab Manual Impact of A JetProfessr ProfessrОценок пока нет
- Estimating Water Flow Rates EC1369 1994 PDFДокумент0 страницEstimating Water Flow Rates EC1369 1994 PDFwifiwaves3750Оценок пока нет