Вам также может понравиться
- Prova de Lógica (Avaliando Aprendizado)Документ8 страницProva de Lógica (Avaliando Aprendizado)Leandro Cabral100% (1)
- Tutorial TwidoДокумент14 страницTutorial TwidoMiguel A V FuscoОценок пока нет
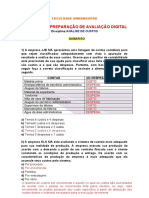
- ED (1 A 5)Документ8 страницED (1 A 5)Vikinet100% (1)
- Prova Algoritmos RespostasДокумент145 страницProva Algoritmos RespostasL. CoralОценок пока нет
- Aula 07 - ExerciciosДокумент5 страницAula 07 - ExerciciosLuciano FerreiraОценок пока нет
- AP Comandos EletricosДокумент2 страницыAP Comandos EletricosCharles DutraОценок пока нет
- Material Desafio Paraná PDFДокумент23 страницыMaterial Desafio Paraná PDFFERNANDA APARECIDA ISRAELОценок пока нет
- Acionamentos EletrônicosДокумент3 страницыAcionamentos EletrônicosDOUGLASОценок пока нет
- TCC Automacao IndustrialДокумент75 страницTCC Automacao IndustrialalbertoОценок пока нет
- Prova Cosmos - Codificação Do Projeto Padrões de Programação e Projeto Do Banco de DadosДокумент5 страницProva Cosmos - Codificação Do Projeto Padrões de Programação e Projeto Do Banco de Dadossandro868Оценок пока нет
- Aula PolegadasДокумент12 страницAula PolegadasRodrigo Lopes RodriguesОценок пока нет
- Sel 0312 - Aula2Документ42 страницыSel 0312 - Aula2Carlos CostaОценок пока нет
- Relatório 1 - Elet. Analógica - Curva Característica Do DiodoДокумент8 страницRelatório 1 - Elet. Analógica - Curva Característica Do DiodoAndresa SombraОценок пока нет
- FUNDAMENTOS DE SISTEMAS DE INFORMAÇÃO - Simulado - Aula8 PDFДокумент4 страницыFUNDAMENTOS DE SISTEMAS DE INFORMAÇÃO - Simulado - Aula8 PDFddrum21Оценок пока нет
- Prova IntegracaoBancoDados PDFДокумент4 страницыProva IntegracaoBancoDados PDFValter PatrickОценок пока нет
- Lista de Exercícios de Redes de Computadores - Unidade 1Документ16 страницLista de Exercícios de Redes de Computadores - Unidade 1Giovanni GuimarãesОценок пока нет
- Gabarito - Análise de CustosДокумент4 страницыGabarito - Análise de CustosNilson Gonsalves RibeiroОценок пока нет
- Propostas de Exercícios para Resolver em Linguagem FBDДокумент4 страницыPropostas de Exercícios para Resolver em Linguagem FBDAntónio HenriquesОценок пока нет
- Atividade 56638Документ2 страницыAtividade 56638Tais Rodrigues67% (3)
- Trabalho-De-Conclusao de Materia Em-Mecatronica-Projeto de PesquisaДокумент13 страницTrabalho-De-Conclusao de Materia Em-Mecatronica-Projeto de PesquisaRonaldo Pereira100% (2)
- MediçõesДокумент24 страницыMediçõesJohhSmithОценок пока нет
- Plano de Negocio Magazine LuizaДокумент21 страницаPlano de Negocio Magazine LuizaKaioJheimes100% (1)
- Componentes Fisicos Uma Rede Aula 3Документ25 страницComponentes Fisicos Uma Rede Aula 3Eurico RodriguesОценок пока нет
- Instrumentação e Controle. Exercícios de Revisão.Документ1 страницаInstrumentação e Controle. Exercícios de Revisão.Jonathas SilvaОценок пока нет
- NBR 5383-1 - 2002Документ62 страницыNBR 5383-1 - 2002Adilson100% (1)
- Buck Espaço de Estados PDFДокумент9 страницBuck Espaço de Estados PDFLucas Stanqueviski0% (1)
- Aula1E Programacao1Документ25 страницAula1E Programacao1Ismar Garbazza0% (1)
- Aula 01 - Slides Sobre Sistemas Eletricos de PotenciaДокумент34 страницыAula 01 - Slides Sobre Sistemas Eletricos de PotenciaFranklin Pamplona100% (1)
- Lista 1 Exercicios AlgoritmoДокумент5 страницLista 1 Exercicios AlgoritmoRomulo ReisОценок пока нет
- Protocolos ModbusДокумент11 страницProtocolos ModbusredesinformaОценок пока нет
- Atividade 2 Arquitetura de ComputadoresДокумент4 страницыAtividade 2 Arquitetura de ComputadoresVictor CastroОценок пока нет
- Atividade Pratica WordДокумент1 страницаAtividade Pratica WordWelber Campos50% (2)
- Aula 4Документ38 страницAula 4Jorge Henrique Marques MarianoОценок пока нет
- Atividade Prática (1) ExelДокумент2 страницыAtividade Prática (1) ExelHenrique MarquesОценок пока нет
- AVG - Cálculo Diferencial e Integral IIIДокумент4 страницыAVG - Cálculo Diferencial e Integral IIIJosiel GomesОценок пока нет
- Introdução À Programação - Aula 09 - Estruturas de Controle - Switch Case PDFДокумент12 страницIntrodução À Programação - Aula 09 - Estruturas de Controle - Switch Case PDFBruno Crestani CalegaroОценок пока нет
- Eletrônica Básica AvaliaçãoДокумент6 страницEletrônica Básica AvaliaçãoHeverson Rocha LuzОценок пока нет
- Preparando para AV1 Redes de ComputadoresДокумент9 страницPreparando para AV1 Redes de ComputadoresPatrícia Sotero VerrierОценок пока нет
- Relatório de Prática Sistemas Digitais - Circuitos LógicosДокумент24 страницыRelatório de Prática Sistemas Digitais - Circuitos LógicosLivia Faria PeresОценок пока нет
- 3.2-C - Exercícios Switch CaseДокумент2 страницы3.2-C - Exercícios Switch Case•Hi Jammers100% (1)
- Portifolio - Individual UNOPAR 4º SemestreДокумент11 страницPortifolio - Individual UNOPAR 4º SemestreDiego FariasОценок пока нет
- Relatório Estacionamento InteligenteДокумент8 страницRelatório Estacionamento InteligenteThallys Lima0% (1)
- Prova 1 - Online 2020 - 3Документ7 страницProva 1 - Online 2020 - 3Daniele AlbuquerqueОценок пока нет
- Lista de Exercícios - Trabalho Individual Cap. Ii Vetores No Plano e No EspaçoДокумент4 страницыLista de Exercícios - Trabalho Individual Cap. Ii Vetores No Plano e No EspaçoMisael TeixeiraОценок пока нет
- Estudo de Caso TNTДокумент3 страницыEstudo de Caso TNTNayan CayckОценок пока нет
- Questões IHMДокумент7 страницQuestões IHMElmo Dutra FilhoОценок пока нет
- TCC Logística Integrada AДокумент8 страницTCC Logística Integrada AGustavo MotaОценок пока нет
- Manual TCC Etec Comendador Joao Rays1Документ31 страницаManual TCC Etec Comendador Joao Rays1otaviosnetoОценок пока нет
- Seguranca de Redes em Ambientes Cooperat PDFДокумент244 страницыSeguranca de Redes em Ambientes Cooperat PDFCleilson PereiraОценок пока нет
- 2.2 Dispositivos Lógicos ProgramáveisДокумент25 страниц2.2 Dispositivos Lógicos ProgramáveisThiago Azevedo0% (1)
- Prova 01 Arquitetura de Computadores - Nícolas Dias Tomaz - 201827050071Документ3 страницыProva 01 Arquitetura de Computadores - Nícolas Dias Tomaz - 201827050071levi100% (1)
- Relatorio Do SemáforoДокумент4 страницыRelatorio Do SemáforoKamila MarinhoОценок пока нет
- Controlador Lógico ProgramávelДокумент67 страницControlador Lógico ProgramávelThiagoPaganiОценок пока нет
- Aluno Marilourdes Silva CLP PDFДокумент7 страницAluno Marilourdes Silva CLP PDFDiego SouzaОценок пока нет
- Controlador Lógico Programável PAULOДокумент5 страницControlador Lógico Programável PAULONatalicio CardosoОценок пока нет
- PLC 01Документ51 страницаPLC 01Carlos Eduardo Viana SilvaОценок пока нет
- CLP1Документ29 страницCLP1Zickson ManjateОценок пока нет
- AULA 02 - História e Arquitetura Dos ClpsДокумент10 страницAULA 02 - História e Arquitetura Dos ClpsGustavo da SilvaОценок пока нет
- Controlador Lógico Programável - Wikipédia, A Enciclopédia LivreДокумент11 страницControlador Lógico Programável - Wikipédia, A Enciclopédia LivreManutencao Dass ConfecçãoОценок пока нет
- ALT-02-1 Aula 01 Teoria e Execução de Programas LadderДокумент21 страницаALT-02-1 Aula 01 Teoria e Execução de Programas LadderDoidela DoidelaОценок пока нет
- Bilquis Sheikh - Atrevi-Me A Chamar-Lhe PaiДокумент155 страницBilquis Sheikh - Atrevi-Me A Chamar-Lhe Paifabiano6cbОценок пока нет
- N-2040 Contec: RevalidaçãoДокумент92 страницыN-2040 Contec: RevalidaçãoandreisraelОценок пока нет
- WEG Guia de Especificacao de Motores Eletricos 50032749 Manual Portugues BRДокумент68 страницWEG Guia de Especificacao de Motores Eletricos 50032749 Manual Portugues BRAndressa CarvalhoОценок пока нет
- Como Especificar Um TTAДокумент42 страницыComo Especificar Um TTAmagtrolОценок пока нет
- NBR IEC-60079-14-2009 - Atmosferas Explosivas - Parte 14 Projeto, Seleção e Montagem de Instalações Elétricas - Errata 1Документ1 страницаNBR IEC-60079-14-2009 - Atmosferas Explosivas - Parte 14 Projeto, Seleção e Montagem de Instalações Elétricas - Errata 1andreisraelОценок пока нет
- Apostila de Equipamentos Elétricos Industriais - Rev - Abril 2014Документ68 страницApostila de Equipamentos Elétricos Industriais - Rev - Abril 2014Marcio RochaОценок пока нет
- N 1883Документ22 страницыN 1883pedrojuniorwОценок пока нет
- N 1883Документ22 страницыN 1883pedrojuniorwОценок пока нет
- NBR 5383-1-2002 - Máquinas Elétricas Girantes - Parte 1 Motores de Indução Trifásicos - EnsaiosДокумент62 страницыNBR 5383-1-2002 - Máquinas Elétricas Girantes - Parte 1 Motores de Indução Trifásicos - EnsaiosandreisraelОценок пока нет
- NBR 11106-1989 - Cálculo de Ventilação para Compartimento de Baterias em Plataformas Marítimas de Produção de PetróleoДокумент3 страницыNBR 11106-1989 - Cálculo de Ventilação para Compartimento de Baterias em Plataformas Marítimas de Produção de PetróleoandreisraelОценок пока нет
- Apostila Orientativa para Projetistas SPDA OkДокумент9 страницApostila Orientativa para Projetistas SPDA OkandreisraelОценок пока нет
- Abnt 7195-Cores para Segurança PDFДокумент3 страницыAbnt 7195-Cores para Segurança PDFandreisraelОценок пока нет
- Rede Profibus DP Com Mestre Siemens Remota Serie Ponto NAP050Документ22 страницыRede Profibus DP Com Mestre Siemens Remota Serie Ponto NAP050Luciano SantosОценок пока нет
- Trabalho de Automação de Sistemas Elétricos de PotênciaДокумент14 страницTrabalho de Automação de Sistemas Elétricos de PotênciaandreisraelОценок пока нет
- Resumo GeralДокумент32 страницыResumo GeralwidneylondrinaОценок пока нет
- NR10 - Segurança em Intalações e Serviços em EletricidadeДокумент21 страницаNR10 - Segurança em Intalações e Serviços em Eletricidadenilsonery100% (1)
- Automação ResidencialДокумент29 страницAutomação ResidencialcglinuxОценок пока нет
- Sistema de AterramentoДокумент22 страницыSistema de AterramentotiagomarclioОценок пока нет
- Calendario 2021Документ3 страницыCalendario 2021JOSE OLIVEIRAОценок пока нет
- Contabilidade Intermediaria 28 09 2017Документ24 страницыContabilidade Intermediaria 28 09 2017Gilson Barbosa50% (2)
- Novos Olhares para Os Antigos PDFДокумент464 страницыNovos Olhares para Os Antigos PDFsilasrm100% (1)
- Integral Indefinida - 2018.2-1Документ15 страницIntegral Indefinida - 2018.2-1Pablo BorgesОценок пока нет
- Projeto de Pesquisa - TC1 - REVISÃO SISTEMÁTICA DA LITERATURAДокумент32 страницыProjeto de Pesquisa - TC1 - REVISÃO SISTEMÁTICA DA LITERATURAWeder Fernando Nazari100% (1)
- Treinamentos AbecgДокумент48 страницTreinamentos AbecgPatricia MendonçaОценок пока нет
- PPQ CFSTДокумент50 страницPPQ CFSTRoberto Santos FilhoОценок пока нет
- BIA Método BrasilianoДокумент10 страницBIA Método BrasilianomarcelorgsОценок пока нет
- Comentários Sobre SquinnerДокумент7 страницComentários Sobre SquinnerANSELMOОценок пока нет
- O Largo, Manuel Da FonsecaДокумент3 страницыO Largo, Manuel Da FonsecaAleunamOrdisiОценок пока нет
- CIEM1 - Introducao Ao Estudo Dos Instrumentos MusicaisДокумент15 страницCIEM1 - Introducao Ao Estudo Dos Instrumentos MusicaisToni Carlos MiguelОценок пока нет
- Relé de Tempo E Estrela Triângulo: Esquema Elétrico LK-RT Lk-RyДокумент4 страницыRelé de Tempo E Estrela Triângulo: Esquema Elétrico LK-RT Lk-RyPaulo FerreiraОценок пока нет
- Lean Inception - Como Alinhar Pe - Paulo Caroli PDFДокумент177 страницLean Inception - Como Alinhar Pe - Paulo Caroli PDFLucas XimenesОценок пока нет
- Genetica - 1 - Lei - Mendel Listão 1Документ17 страницGenetica - 1 - Lei - Mendel Listão 1edilsongoncalves67% (6)
- SD01 Matemática (MiniSimulado)Документ7 страницSD01 Matemática (MiniSimulado)mayra ifesОценок пока нет
- Masculinidade em Crise-WPS OfficeДокумент3 страницыMasculinidade em Crise-WPS OfficePastorNocivaldo CostaОценок пока нет
- UFCD A362 - Construções Metalicas - Dar TEKLAДокумент1 страницаUFCD A362 - Construções Metalicas - Dar TEKLAAntonio MarinhoОценок пока нет
- Livro Desenho e AnimaçãoДокумент236 страницLivro Desenho e AnimaçãoGilmar SilvaОценок пока нет
- Univeridade Lusófona de Cabo Verde Licenciatura em Direito Disciplina: História Do Direito Direito - 2° Semestre Professora: Msc. Jocilene GomesДокумент8 страницUniveridade Lusófona de Cabo Verde Licenciatura em Direito Disciplina: História Do Direito Direito - 2° Semestre Professora: Msc. Jocilene GomesCésar Santos SilvaОценок пока нет
- Tradusaun Expropriasaun Biling Lei N 8 2017Документ36 страницTradusaun Expropriasaun Biling Lei N 8 2017zequiel fernandesОценок пока нет
- CFP c208 - Texto Base Parte4Документ134 страницыCFP c208 - Texto Base Parte4Elysson RamalhoОценок пока нет
- Apresentacao Jose Neves Michelin PDFДокумент9 страницApresentacao Jose Neves Michelin PDFMauricio Costa De MouraОценок пока нет
- 3Документ6 страниц3Karol SilvaОценок пока нет
- VHP GaxetasДокумент20 страницVHP GaxetasOrimak MaquinaОценок пока нет
- Redação 2023 - Quinzena EnemДокумент124 страницыRedação 2023 - Quinzena Enemjc1465614Оценок пока нет
- Plano 2012 s01 p05 Nutricao Enfermagem PDFДокумент4 страницыPlano 2012 s01 p05 Nutricao Enfermagem PDFTatiane BarrosОценок пока нет
- Mini-Pautas .12 2021.2022Документ6 страницMini-Pautas .12 2021.2022Miguel KaioveОценок пока нет
- LM - EDO - Cap 01Документ29 страницLM - EDO - Cap 01Pedro FerreiraОценок пока нет
- Portfólios Mais Um Modismo Na EducaçãoДокумент11 страницPortfólios Mais Um Modismo Na EducaçãoAnonymous 0MeeOpELOhОценок пока нет
- Responsabilidade Social CorporativaДокумент31 страницаResponsabilidade Social CorporativaDênison MarinhoОценок пока нет