Вам также может понравиться
- CAESAR-II Output ReportДокумент37 страницCAESAR-II Output ReportSaima Saima100% (1)
- Load Case CAESAR IIДокумент6 страницLoad Case CAESAR IIshakasspОценок пока нет
- Alignment Check Methodology in Piping Stress Analysis Using Caesar IIДокумент2 страницыAlignment Check Methodology in Piping Stress Analysis Using Caesar IIYoesbar Sofyan100% (1)
- Air Cooler Piping Stress Analysis Using Caesar IIДокумент5 страницAir Cooler Piping Stress Analysis Using Caesar IIsemin prsesОценок пока нет
- AB118SAR01 - Piping Stress Analysis Report For Steam SystemДокумент1 157 страницAB118SAR01 - Piping Stress Analysis Report For Steam SystemPinak ProjectsОценок пока нет
- CAESAR II - Modeling Victaulic CouplingsДокумент5 страницCAESAR II - Modeling Victaulic CouplingsDenny ThomasОценок пока нет
- Pipe Stress Analysis Using CAESAR II PDFДокумент42 страницыPipe Stress Analysis Using CAESAR II PDFdeni prastiko100% (1)
- Trunnion Checking or Dummy Checking During Stress Analysis of A Piping SystemДокумент2 страницыTrunnion Checking or Dummy Checking During Stress Analysis of A Piping SystemAmit SharmaОценок пока нет
- Asme B 31J SifДокумент6 страницAsme B 31J SifVineesh Vs100% (1)
- Stress Analysis of PSV Connected Piping Systems Using Caesar IIДокумент6 страницStress Analysis of PSV Connected Piping Systems Using Caesar IIwisesaОценок пока нет
- Work Instruction - Expansion Joint Modelling in CAESAR IIДокумент11 страницWork Instruction - Expansion Joint Modelling in CAESAR IIChanОценок пока нет
- PDIL-Stress Analysis Design Basis PDFДокумент13 страницPDIL-Stress Analysis Design Basis PDFDarshan Panchal100% (1)
- AutoPIPE Vs CAESAR Load CombinationsДокумент7 страницAutoPIPE Vs CAESAR Load CombinationsSharun SureshОценок пока нет
- Nozzle CheckДокумент11 страницNozzle CheckincaurcoОценок пока нет
- Pipe Stress Analysis by Computer CAESAR II PDFДокумент11 страницPipe Stress Analysis by Computer CAESAR II PDFAbhijeetОценок пока нет
- CAESAR II Flange CalcДокумент8 страницCAESAR II Flange CalcDavid Fonseca100% (1)
- Example From Theory To Caesar II PDFДокумент12 страницExample From Theory To Caesar II PDFIskandar Hasibuan100% (1)
- Selection Criteria For Lines Subject To Comprehensive Stress AnalysisДокумент10 страницSelection Criteria For Lines Subject To Comprehensive Stress AnalysisNithin Zs100% (1)
- Harmonic Analysis REV. 1Документ7 страницHarmonic Analysis REV. 1Amro SalahОценок пока нет
- Column Piping Stress AnalysisДокумент6 страницColumn Piping Stress Analysissj22Оценок пока нет
- Caesar II TutorialДокумент35 страницCaesar II TutorialzahoorОценок пока нет
- CAESARII Output WebinarДокумент43 страницыCAESARII Output WebinarAnkithОценок пока нет
- Piping Stress Analysis SpecificationДокумент1 страницаPiping Stress Analysis SpecificationAdrian García Moyano100% (1)
- Load CombinationsДокумент3 страницыLoad Combinationserikoh100% (1)
- Stress Analysis Specification: CONT. NO.: 1032/GC-GN/CON-EP09-00 DOC. NO.: 3607/34-78-ED-PI-SPДокумент23 страницыStress Analysis Specification: CONT. NO.: 1032/GC-GN/CON-EP09-00 DOC. NO.: 3607/34-78-ED-PI-SPhamedpdms100% (1)
- Virtual Anchor Length - KBRДокумент22 страницыVirtual Anchor Length - KBRSammar Adhikari100% (2)
- Importance & Impact of Stress Intensification Factor (SIF) : A PresentationДокумент8 страницImportance & Impact of Stress Intensification Factor (SIF) : A Presentationcasaean100% (1)
- Slug Flow Analysis Using Dynamic Spectrum Method in Caesar IIДокумент7 страницSlug Flow Analysis Using Dynamic Spectrum Method in Caesar IIJ A S JASОценок пока нет
- CAESAR II-CAUx 2018 - Fatigue Analysis in CAESAR II PDFДокумент34 страницыCAESAR II-CAUx 2018 - Fatigue Analysis in CAESAR II PDFzahoor100% (1)
- Expansion Joint ModelДокумент1 страницаExpansion Joint ModelnirgaОценок пока нет
- NC3658 Flange CheckДокумент2 страницыNC3658 Flange CheckvsvineeshОценок пока нет
- Modeling of Internal Pressure and Thrust Load On Nozzles Using WRC 368Документ5 страницModeling of Internal Pressure and Thrust Load On Nozzles Using WRC 368m5416Оценок пока нет
- 45 Deg Branch SIFsДокумент1 страница45 Deg Branch SIFsayoungaОценок пока нет
- 01 - Hanger Sizing in CAESAR IIДокумент40 страниц01 - Hanger Sizing in CAESAR IIJimmy Alexander AvilaОценок пока нет
- Piping Stress Analysis Pipeline System in Offshore PlatformДокумент2 страницыPiping Stress Analysis Pipeline System in Offshore Platformgpskumar22100% (1)
- Static Analysis of Piping SystemsДокумент37 страницStatic Analysis of Piping SystemsLeandro VargasОценок пока нет
- 04 - Local Coordinate SystemДокумент18 страниц04 - Local Coordinate Systemerikoh100% (2)
- CaesarДокумент32 страницыCaesarAndi Pramana80% (5)
- Taller3 Modeling Concepts in Buried Pipe AnalysisДокумент29 страницTaller3 Modeling Concepts in Buried Pipe AnalysisFSAAVEDRAF100% (1)
- Configuration Caesar IIДокумент69 страницConfiguration Caesar IIJesusDiFabio100% (2)
- Allowable Stress RangeДокумент2 страницыAllowable Stress RangeSharun SureshОценок пока нет
- Guideline For GRE Pipe Stress Analysis - T SrinivasanДокумент5 страницGuideline For GRE Pipe Stress Analysis - T Srinivasansri06Оценок пока нет
- Water Hammer Effect - Caesar II Case StudyДокумент35 страницWater Hammer Effect - Caesar II Case Studyghkashyap1Оценок пока нет
- PSV Forces in Closed SystemДокумент3 страницыPSV Forces in Closed SystemayoungaОценок пока нет
- Slug Flow Analysis Using Dynamic Spectrum Method in Caesar II Part 2 of 2Документ4 страницыSlug Flow Analysis Using Dynamic Spectrum Method in Caesar II Part 2 of 2Romner Cordova100% (2)
- Procedure For Pump Line Stress AnalysisДокумент9 страницProcedure For Pump Line Stress AnalysisNilesh Gohel100% (1)
- PSV Connection in Caesar IIДокумент8 страницPSV Connection in Caesar IIHamzaHashim100% (1)
- ONGC - Pipe Stress PhilosphyДокумент26 страницONGC - Pipe Stress Philosphyraj100% (1)
- Stress Analysis of Column Piping System Using Caesar IIДокумент7 страницStress Analysis of Column Piping System Using Caesar IIHmd Mokhtari100% (1)
- CAESAR II - Pipe Stress AnalysisДокумент6 страницCAESAR II - Pipe Stress Analysisnguyentrungsonctm7Оценок пока нет
- Compression Springs: Compression Spring Design General ConsiderationsДокумент15 страницCompression Springs: Compression Spring Design General Considerationsblowmeasshole1911100% (1)
- Expansion JointsДокумент15 страницExpansion Jointsaop10468Оценок пока нет
- EJMA 10th Edition Changes and Engineering DataДокумент8 страницEJMA 10th Edition Changes and Engineering DatamasrooorОценок пока нет
- CATALOGUE - PT ASIAFLEX SINISUKA TEKNIK Rev.01 - OptДокумент14 страницCATALOGUE - PT ASIAFLEX SINISUKA TEKNIK Rev.01 - OptOdo AsuОценок пока нет
- Extension Springs: Selecting An Extension SpringДокумент60 страницExtension Springs: Selecting An Extension SpringjrklingОценок пока нет
- Spring Design E-BookДокумент10 страницSpring Design E-BookDomingo Argumedo Gómez100% (1)
- Exp JointДокумент62 страницыExp JointDana GuerreroОценок пока нет
- Modelling of Viking Johnson Couplings in Caesar Ii: Figure 1 Quickfit Flange Adaptor by VikingДокумент7 страницModelling of Viking Johnson Couplings in Caesar Ii: Figure 1 Quickfit Flange Adaptor by VikingSaima SaimaОценок пока нет
- Basic Rules of Pump Piping DesignДокумент5 страницBasic Rules of Pump Piping DesignJay ShahОценок пока нет
- How Was + (Noun)Документ1 страницаHow Was + (Noun)karuna346Оценок пока нет
- I Have To + Verb ExamplesДокумент1 страницаI Have To + Verb Exampleskaruna346Оценок пока нет
- If I Were You ExamplesДокумент1 страницаIf I Were You Exampleskaruna346Оценок пока нет
- Use of Branch Connections: Standard Practice ForДокумент5 страницUse of Branch Connections: Standard Practice ForFelix Rodriguez LiraОценок пока нет
- Iam Good at ExaplesДокумент1 страницаIam Good at Exapleskaruna346Оценок пока нет
- I Have +PP ExamplesДокумент1 страницаI Have +PP Exampleskaruna346Оценок пока нет
- I Am Gonna + Verb ExeДокумент1 страницаI Am Gonna + Verb Exekaruna346Оценок пока нет
- Turbine Heat Rate CalculationДокумент2 страницыTurbine Heat Rate Calculationkaruna34650% (2)
- I Have + Noun ExamplesДокумент1 страницаI Have + Noun Exampleskaruna346Оценок пока нет
- Plant DesignДокумент17 страницPlant Designkaruna346Оценок пока нет
- CCI Power ApplicationsДокумент57 страницCCI Power Applicationssukanya_ravichandran100% (1)
- Design & Construction of Piping SystemsДокумент115 страницDesign & Construction of Piping SystemsSuresh Babu100% (13)
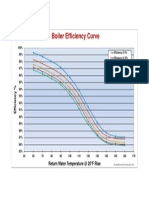
- Boiler Efficiency CurvesДокумент1 страницаBoiler Efficiency Curveskaruna346Оценок пока нет
- Specifying Waste Heat BoilersДокумент5 страницSpecifying Waste Heat Boilerskaruna346Оценок пока нет
- HRSG SimulationДокумент7 страницHRSG Simulationkaruna346Оценок пока нет
- Component Material Equivalent ASTMДокумент1 страницаComponent Material Equivalent ASTMkaruna346Оценок пока нет
- 210MW PPS SimulationДокумент11 страниц210MW PPS Simulationkaruna346Оценок пока нет
- Stress Analysis of Piping Systems and Pipelines - Harvard - UniversityДокумент542 страницыStress Analysis of Piping Systems and Pipelines - Harvard - Universitykaruna346100% (11)
- G-ST-P/OE: Elastomerlips ProfilesДокумент1 страницаG-ST-P/OE: Elastomerlips Profileskaruna346Оценок пока нет
- Archery Association of IndiaДокумент17 страницArchery Association of Indiakaruna346Оценок пока нет
- 9d28939de23952ae026dc6a4a5584db6Документ69 страниц9d28939de23952ae026dc6a4a5584db6rathorsumit2006Оценок пока нет
- International Journal of Computational Engineering Research (IJCER)Документ7 страницInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)Оценок пока нет
- Poh Da40Документ274 страницыPoh Da40Pinco Pallo100% (1)
- DPC130EДокумент44 страницыDPC130Eseaqu3stОценок пока нет
- BYV26Документ5 страницBYV26v2304451Оценок пока нет
- Mitsubishi Case StudyДокумент19 страницMitsubishi Case StudyAmar KunamОценок пока нет
- CMAA Standards of Practice PDFДокумент131 страницаCMAA Standards of Practice PDFNjilou Lagatic100% (2)
- Neil Armstrong Interview (1969)Документ8 страницNeil Armstrong Interview (1969)Aviation/Space History LibraryОценок пока нет
- SP CA MRK 006 R1 Swivelpole Catalogue PDFДокумент24 страницыSP CA MRK 006 R1 Swivelpole Catalogue PDFluciaОценок пока нет
- Datenblatt Natalie English WebДокумент5 страницDatenblatt Natalie English WebNMHaОценок пока нет
- 28385-1 Quotation 333kW Containerized Soluttion Genesis ElectricityДокумент10 страниц28385-1 Quotation 333kW Containerized Soluttion Genesis ElectricityNelsonОценок пока нет
- Full Test 5Документ5 страницFull Test 5ngocyen_xitrumОценок пока нет
- 12c ASMДокумент620 страниц12c ASMroshanjoseОценок пока нет
- Repair Max II Pump 310894lДокумент20 страницRepair Max II Pump 310894lAndreina FajardoОценок пока нет
- 2017aptransco RT 263Документ10 страниц2017aptransco RT 263Arogya Raju PudhotaОценок пока нет
- Section 'H-H' Section 'J-J' Section 'L-L'Документ1 страницаSection 'H-H' Section 'J-J' Section 'L-L'Rakesh ReddyОценок пока нет
- TFE 731 Chap 72Документ38 страницTFE 731 Chap 72Egor85100% (1)
- Pj8 Service ManualДокумент15 страницPj8 Service ManualHugo TejadaОценок пока нет
- Toyota Motor Corporation and TPSДокумент5 страницToyota Motor Corporation and TPSMaitri BiswadharaОценок пока нет
- One Tracking Device, Multiple Applications: Fleet Management Track & Trace Security Data Mining - AnalyticsДокумент8 страницOne Tracking Device, Multiple Applications: Fleet Management Track & Trace Security Data Mining - AnalyticsdjcesarvОценок пока нет
- Noark Control Catalog CA LRДокумент76 страницNoark Control Catalog CA LRlcsandovalr989Оценок пока нет
- E Voting GanttДокумент2 страницыE Voting Ganttpikes89Оценок пока нет
- Supply Chain Management - Test 1 MemoДокумент5 страницSupply Chain Management - Test 1 MemoNaomiОценок пока нет
- EDISON Group Profile PDFДокумент56 страницEDISON Group Profile PDFAnonymous KAIphjNdLzОценок пока нет
- Michael Baron Probability and Statistics For Computer Scientists Solution ManualДокумент4 страницыMichael Baron Probability and Statistics For Computer Scientists Solution Manualrahul sharma8% (12)
- Executive Summary Business PlanДокумент30 страницExecutive Summary Business PlanSiddiq Ahmed91% (11)
- Bid Docs SampleДокумент70 страницBid Docs Sampleshhna auxОценок пока нет
- Method Statements For Eskom Substations - Stringing, Erection, Earthing and Cabling PDFДокумент27 страницMethod Statements For Eskom Substations - Stringing, Erection, Earthing and Cabling PDFTreenel TradingОценок пока нет
- Bolts and NutsДокумент18 страницBolts and NutsKhaled SalemОценок пока нет
- Albion TradingДокумент1 074 страницыAlbion TradingalcatéiaОценок пока нет