Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Orace 11g PLSQL Full ReferenceДокумент712 страницOrace 11g PLSQL Full ReferencepsurendraОценок пока нет
- FP - Sin G - A4027Документ1 страницаFP - Sin G - A4027James Ernes Llacza CarmeloОценок пока нет
- 3.8.-Referencias Bibliográficas Correspondientes Al Capítulo 3Документ16 страниц3.8.-Referencias Bibliográficas Correspondientes Al Capítulo 3James Ernes Llacza CarmeloОценок пока нет
- Sin G - A4030Документ1 страницаSin G - A4030James Ernes Llacza CarmeloОценок пока нет
- CC 1f A4030Документ1 страницаCC 1f A4030James Ernes Llacza CarmeloОценок пока нет
- RecloserДокумент1 страницаRecloserJames Ernes Llacza CarmeloОценок пока нет
- RecloserДокумент1 страницаRecloserJames Ernes Llacza CarmeloОценок пока нет
- FP - Sin G - A4027Документ1 страницаFP - Sin G - A4027James Ernes Llacza CarmeloОценок пока нет
- Sin G - A4030Документ1 страницаSin G - A4030James Ernes Llacza CarmeloОценок пока нет
- Sin G - A4029Документ1 страницаSin G - A4029James Ernes Llacza CarmeloОценок пока нет
- Gen9 Gen7Документ1 страницаGen9 Gen7James Ernes Llacza CarmeloОценок пока нет
- FP - Sin G - A4027Документ1 страницаFP - Sin G - A4027James Ernes Llacza CarmeloОценок пока нет
- Texcan Teck 5KV UnshieldedДокумент2 страницыTexcan Teck 5KV UnshieldedJames Ernes Llacza CarmeloОценок пока нет
- S 280781Документ32 страницыS 280781James Ernes Llacza CarmeloОценок пока нет
- Catálogo AlumosteelДокумент5 страницCatálogo AlumosteelJames Ernes Llacza CarmeloОценок пока нет
- CT SchneiderДокумент21 страницаCT Schneidersurya892Оценок пока нет
- Teck 901 5Kv UnshieldedДокумент4 страницыTeck 901 5Kv UnshieldedJames Ernes Llacza CarmeloОценок пока нет
- Texcan Teck 1KVДокумент4 страницыTexcan Teck 1KVJames Ernes Llacza CarmeloОценок пока нет
- Cables AetnaДокумент1 страницаCables AetnaJames Ernes Llacza CarmeloОценок пока нет
- 1 14 PDFДокумент7 страниц1 14 PDFCarlos Lino Rojas AgüeroОценок пока нет
- Current Transformers How To Specify Them PDFДокумент36 страницCurrent Transformers How To Specify Them PDFargari19Оценок пока нет
- Saturacion de TC S y Su Impacto en Reles DigitalesДокумент7 страницSaturacion de TC S y Su Impacto en Reles DigitalesMark CoolОценок пока нет
- Modern Solutions To CДокумент10 страницModern Solutions To CJames Ernes Llacza CarmeloОценок пока нет
- Practical Control of Switching Overvoltages by Switch-Sync Controller PDFДокумент6 страницPractical Control of Switching Overvoltages by Switch-Sync Controller PDFkaushikray06Оценок пока нет
- CT SchneiderДокумент21 страницаCT Schneidersurya892Оценок пока нет
- ABI High Voltage Engineering and Testing 3rd EditionДокумент1 страницаABI High Voltage Engineering and Testing 3rd EditionJames Ernes Llacza CarmeloОценок пока нет
- SEL Power Your Future ScholarshipДокумент2 страницыSEL Power Your Future ScholarshipJames Ernes Llacza CarmeloОценок пока нет
- Maintenance Scheduling For Electrical EquipmentДокумент82 страницыMaintenance Scheduling For Electrical Equipmentduonza100% (6)
- Shunt Reactor Switching Transients at High Compensation LevelsДокумент14 страницShunt Reactor Switching Transients at High Compensation LevelsJames Ernes Llacza Carmelo100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Topic 7Документ18 страницTopic 7Anonymous 0fCNL9T0Оценок пока нет
- FPO Policy-1Документ96 страницFPO Policy-1shashanksaranОценок пока нет
- Basic Services and Facilities Matrix - Local Gov''tДокумент2 страницыBasic Services and Facilities Matrix - Local Gov''tMishi Liao100% (2)
- Oxidation Ponds & LagoonsДокумент31 страницаOxidation Ponds & LagoonsDevendra Sharma100% (1)
- ALLOY 7150-T7751 PLATE AND 7150-T77511 EXTRUSIONS: Alcoa Mill ProductsДокумент4 страницыALLOY 7150-T7751 PLATE AND 7150-T77511 EXTRUSIONS: Alcoa Mill Productshitesh_tilalaОценок пока нет
- Account Statement From 27 Dec 2017 To 27 Jun 2018Документ4 страницыAccount Statement From 27 Dec 2017 To 27 Jun 2018mrcopy xeroxОценок пока нет
- Finaldis2011 1Документ4 страницыFinaldis2011 1syaiful.idzwanОценок пока нет
- Qualifications and Disqualifications of CandidatesДокумент3 страницыQualifications and Disqualifications of CandidatesCARLO JOSE BACTOLОценок пока нет
- JDCF-66 220 VTДокумент13 страницJDCF-66 220 VTHusein OkhonovОценок пока нет
- Harrowererickson 1941Документ16 страницHarrowererickson 1941Flavia ChОценок пока нет
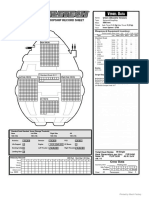
- Union Class Dropship 3025Документ1 страницаUnion Class Dropship 3025A KОценок пока нет
- Oil & Grease CatalogДокумент4 страницыOil & Grease Catalogmanoj983@gmail.comОценок пока нет
- Nagpur Company List 2Документ10 страницNagpur Company List 2Kaushik BachanОценок пока нет
- CHAPTER 2 Principles of MarketingДокумент41 страницаCHAPTER 2 Principles of MarketingASHIMA THAPAОценок пока нет
- Thousands of Relocation Jobs Await You Anytime, Anywhere!: About UsДокумент3 страницыThousands of Relocation Jobs Await You Anytime, Anywhere!: About UsWeackson Guerrier100% (1)
- Piston EffectДокумент11 страницPiston EffectBK180Оценок пока нет
- Batch 2 SEC Online Test AnswersДокумент5 страницBatch 2 SEC Online Test AnswersBhairav YouthsОценок пока нет
- Designing A 3D Jewelry ModelДокумент4 страницыDesigning A 3D Jewelry ModelAbdulrahman JradiОценок пока нет
- Improving The Passenger Experience: Monitoring Airport Quality of ServiceДокумент6 страницImproving The Passenger Experience: Monitoring Airport Quality of ServiceParisa HadidianОценок пока нет
- Why CPVC Pipes FailДокумент12 страницWhy CPVC Pipes FailNikita Kadam100% (1)
- QuaverEd Lesson Plan 6-7Документ10 страницQuaverEd Lesson Plan 6-7zgyleopardОценок пока нет
- HRDM 21 Midnotes - TwoДокумент51 страницаHRDM 21 Midnotes - TwoTimОценок пока нет
- Share Purchase Agreement Short FormДокумент7 страницShare Purchase Agreement Short FormGerald HansОценок пока нет
- 2023-04-28 NMSU Executive SummaryДокумент2 страницы2023-04-28 NMSU Executive SummaryDamienWillisОценок пока нет
- Engineering & Machinery Corp vs. CAДокумент8 страницEngineering & Machinery Corp vs. CALaila Ismael SalisaОценок пока нет
- Tia-Eia-Is 801-1 - 2001Документ148 страницTia-Eia-Is 801-1 - 2001John UrdanetaОценок пока нет
- Yosys+Nextpnr: An Open Source Framework From Verilog To Bitstream For Commercial FpgasДокумент4 страницыYosys+Nextpnr: An Open Source Framework From Verilog To Bitstream For Commercial FpgasFutsal AlcoletgeОценок пока нет
- Activity 3 Data SheetДокумент9 страницActivity 3 Data SheetEli GabuatОценок пока нет
- Primal Grow Pro Supplement Review - Does It Work or Scam?Документ3 страницыPrimal Grow Pro Supplement Review - Does It Work or Scam?Rakib0% (1)
- How To Create The Approval Transaction Type For AMEДокумент5 страницHow To Create The Approval Transaction Type For AMERehmat RehmatОценок пока нет