Вам также может понравиться
- Manejo de Emergencias VolcánicasДокумент48 страницManejo de Emergencias VolcánicaslhhortuahОценок пока нет
- Cohesion y FriccionДокумент7 страницCohesion y FriccionAugusto Chua AnayaОценок пока нет
- Noticias Deslizamientos Colombia 2019Документ17 страницNoticias Deslizamientos Colombia 2019lhhortuahОценок пока нет
- Clase 11. Mano de ObraДокумент11 страницClase 11. Mano de ObralhhortuahОценок пока нет
- Manual de Geologia para Ingenieros - Gonzalo Duque Escobar PDFДокумент622 страницыManual de Geologia para Ingenieros - Gonzalo Duque Escobar PDFlhhortuahОценок пока нет
- Clase 4 Tipos de Costos PresupuestoДокумент18 страницClase 4 Tipos de Costos PresupuestolhhortuahОценок пока нет
- Clase 11. Mano de ObraДокумент11 страницClase 11. Mano de ObralhhortuahОценок пока нет
- Convergence Confinement AFTESДокумент47 страницConvergence Confinement AFTESlhhortuahОценок пока нет
- 04 - ESPECIFICACIONES TECNICAS (Adenda No. 2) PDFДокумент133 страницы04 - ESPECIFICACIONES TECNICAS (Adenda No. 2) PDFnataliaОценок пока нет
- Manejo de Emergencias VolcánicasДокумент48 страницManejo de Emergencias VolcánicaslhhortuahОценок пока нет
- Manual de Geologia para Ingenieros - Gonzalo Duque EscobarДокумент25 страницManual de Geologia para Ingenieros - Gonzalo Duque EscobarlhhortuahОценок пока нет
- Libro Presentación Proyectos IlpesДокумент257 страницLibro Presentación Proyectos IlpesJoseMaciasОценок пока нет
- Manual de Geologia para Ingenieros - Gonzalo Duque Escobar PDFДокумент622 страницыManual de Geologia para Ingenieros - Gonzalo Duque Escobar PDFlhhortuahОценок пока нет
- Presentacion 11 - Evaluacion de Financiera de Proyectos - 2Документ37 страницPresentacion 11 - Evaluacion de Financiera de Proyectos - 2lhhortuahОценок пока нет
- Como Escribir Un Paper - Orientaciones y PDFДокумент8 страницComo Escribir Un Paper - Orientaciones y PDFlhhortuahОценок пока нет
- Formulación Y Evaluación de Proyectos Viales Y de TransporteДокумент400 страницFormulación Y Evaluación de Proyectos Viales Y de Transportelhhortuah100% (2)
- Hidraulica de Tuberias y CanalesДокумент530 страницHidraulica de Tuberias y CanalesÁngl Pln100% (1)
- Hidraulica General Vol. 1 - Gilberto Sotelo DavilaДокумент285 страницHidraulica General Vol. 1 - Gilberto Sotelo DavilaJetro Gómez RiosОценок пока нет
- Estructuras de Concreto I - Jorge SeguraДокумент250 страницEstructuras de Concreto I - Jorge SeguraLuis Abril100% (3)
- Anexo Tcnico - SDM Entrega Resultados de La Encuesta Movilidad de Bogot 2011 - 5018 PDFДокумент13 страницAnexo Tcnico - SDM Entrega Resultados de La Encuesta Movilidad de Bogot 2011 - 5018 PDFlhhortuahОценок пока нет
- Modelos Transporte Ortuzar PDFДокумент705 страницModelos Transporte Ortuzar PDFlhhortuah63% (8)
- Introducción A La Mecánica de Fluídos - Carlos A. Duarte PDFДокумент223 страницыIntroducción A La Mecánica de Fluídos - Carlos A. Duarte PDFlhhortuah58% (12)
- MaremotoДокумент3 страницыMaremotolhhortuahОценок пока нет
- La Ingenieria de Suelos en Las Vias Terrestres Vol. 2Документ653 страницыLa Ingenieria de Suelos en Las Vias Terrestres Vol. 2Rigoberto Espinoza84% (25)
- Clase 06 - Método Pendiente-DeflexiónДокумент16 страницClase 06 - Método Pendiente-DeflexiónMauricio Leonardo SandovalОценок пока нет
- NSR-10 Titulo AДокумент186 страницNSR-10 Titulo AAngel De La Torre Coll50% (2)
- NTC 121 NuevaДокумент17 страницNTC 121 NuevalhhortuahОценок пока нет
- 06 FlexionDesviadaДокумент6 страниц06 FlexionDesviadalhhortuahОценок пока нет
- 06 FlexionOrtogonalДокумент7 страниц06 FlexionOrtogonallhhortuahОценок пока нет
- 04 Descargar Rotaciones Geometria Primero de Secundaria PDFДокумент6 страниц04 Descargar Rotaciones Geometria Primero de Secundaria PDFbenito sixto100% (1)
- 506 02 - 10 - 2020Документ23 страницы506 02 - 10 - 2020Lindaluna MartínezОценок пока нет
- Pauta GeometríaДокумент16 страницPauta GeometríaJosefina ChamblasОценок пока нет
- Función cuadráticaДокумент13 страницFunción cuadráticaSánches ECokoritoОценок пока нет
- Clase 3 Estatica 26-08-2022Документ17 страницClase 3 Estatica 26-08-2022Manuel VargasОценок пока нет
- Proyecto Geométrico de Carreteras PDFДокумент100 страницProyecto Geométrico de Carreteras PDFluis alberto garcia rodriguez50% (2)
- 19 ConoДокумент8 страниц19 ConoIke_CollpaОценок пока нет
- Teoria Electromegnetica Juan Carlos GranadaДокумент323 страницыTeoria Electromegnetica Juan Carlos GranadaErika ErikaОценок пока нет
- Unidad N°2Документ6 страницUnidad N°2Antonela Torres SotoОценок пока нет
- METROLOGIAДокумент2 страницыMETROLOGIALuiis MtzОценок пока нет
- P.C.A. Fisica 1Документ19 страницP.C.A. Fisica 1Tablet ExtratechОценок пока нет
- Calculo 1 Problemas y Soluciones - Mcgraw-Hill - SchaumДокумент103 страницыCalculo 1 Problemas y Soluciones - Mcgraw-Hill - SchaumLeiito Valbuena Luna100% (2)
- Trapecio 4to PrimariaДокумент20 страницTrapecio 4to PrimariaANGEL CORDOVAОценок пока нет
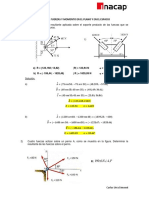
- GUÍA Desarrollada N 1 Fuerzas y Momentos en El Plano y EspacioДокумент17 страницGUÍA Desarrollada N 1 Fuerzas y Momentos en El Plano y Espaciofabian100% (1)
- 02-El Diseño Geométrico Con OrdenadorДокумент151 страница02-El Diseño Geométrico Con OrdenadornsalguesОценок пока нет
- EVALUACIÓN de ENTRADA - Revisión de Intentos Fisica Pa3Документ8 страницEVALUACIÓN de ENTRADA - Revisión de Intentos Fisica Pa3KATTY MILUSKA CALMELL DEL SOLAR ESPINOZAОценок пока нет
- Lista de Ejercicios de Algebra EsfmДокумент5 страницLista de Ejercicios de Algebra EsfmFernando Moreno GomezОценок пока нет
- 02 El Problema de Los Dos CuerposДокумент33 страницы02 El Problema de Los Dos CuerposWilly TovperОценок пока нет
- Geometria PlanaДокумент15 страницGeometria PlanaNormaEsperanzaDavilaLeonОценок пока нет
- Cepre UNI EcuacionesДокумент2 страницыCepre UNI EcuacionesAlexGutierrezОценок пока нет
- Espejos Esfericos Grupo Ordinario y Grupo TardeДокумент3 страницыEspejos Esfericos Grupo Ordinario y Grupo TardeMecing A MichaelОценок пока нет
- Práctica 0Документ2 страницыPráctica 0Eduardo AguilarОценок пока нет
- Pau Valencia 2013 JulioДокумент16 страницPau Valencia 2013 JulioPepita la florОценок пока нет
- N 9-Vectores PDFДокумент2 страницыN 9-Vectores PDFRiverDavid RodriguezОценок пока нет
- Geometria PlanaДокумент35 страницGeometria PlanaUbaldo Cuevas RoblesОценок пока нет
- Movimiento ParabolicoДокумент22 страницыMovimiento ParabolicoCarlos6312Оценок пока нет
- Control de densidad de mallas para estructuras celularesДокумент17 страницControl de densidad de mallas para estructuras celularesHansОценок пока нет
- Campo eléctrico triánguloДокумент4 страницыCampo eléctrico triánguloSebastian Soto PerdomoОценок пока нет
- Inercia de RotacionesДокумент47 страницInercia de RotacionesyosselnОценок пока нет