Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- REspuestas Quiz CP4AUTOMATIONДокумент10 страницREspuestas Quiz CP4AUTOMATIONMax Lee100% (1)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- 2 - Site Crisis Management Plan TemplateДокумент42 страницы2 - Site Crisis Management Plan Templatesentryx1100% (7)
- Industrial DevelopmentДокумент221 страницаIndustrial DevelopmentTimothy FieldsОценок пока нет
- Olympus Epoch XTДокумент8 страницOlympus Epoch XTTimothy FieldsОценок пока нет
- Speed Monitor PDFДокумент30 страницSpeed Monitor PDFTimothy FieldsОценок пока нет
- Liceet 2018 Paper 128Документ5 страницLiceet 2018 Paper 128Timothy FieldsОценок пока нет
- Ontrol Ystems Ociety: Publications Content DigestДокумент11 страницOntrol Ystems Ociety: Publications Content DigestTimothy FieldsОценок пока нет
- TURCK Ultrasonic SensorsДокумент2 страницыTURCK Ultrasonic SensorsTimothy FieldsОценок пока нет
- 2013 Engineering MagazineДокумент28 страниц2013 Engineering MagazineTimothy FieldsОценок пока нет
- Exam2 (Review Slides) PDFДокумент8 страницExam2 (Review Slides) PDFTimothy FieldsОценок пока нет
- CTACДокумент13 страницCTACTimothy FieldsОценок пока нет
- AC Drives: Siemens STEP 2000 CourseДокумент37 страницAC Drives: Siemens STEP 2000 CourseTimothy FieldsОценок пока нет
- Mobilizare Pasiva SoldДокумент1 страницаMobilizare Pasiva SoldTimothy FieldsОценок пока нет
- Simatic St80 Add Ons Complete English 2015 OkДокумент28 страницSimatic St80 Add Ons Complete English 2015 OkTimothy FieldsОценок пока нет
- Consultancy ProjectsДокумент3 страницыConsultancy ProjectsTimothy FieldsОценок пока нет
- Training IEC CE For Control Panels - April 2014 PDFДокумент195 страницTraining IEC CE For Control Panels - April 2014 PDFTimothy Fields100% (1)
- Che 436 Competencies For Exam 2: Level 3Документ8 страницChe 436 Competencies For Exam 2: Level 3Timothy FieldsОценок пока нет
- Fellowship Application 2016 enДокумент3 страницыFellowship Application 2016 enTimothy FieldsОценок пока нет
- GSSScholarship 2017 enДокумент4 страницыGSSScholarship 2017 enTimothy FieldsОценок пока нет
- Industrial AutomationДокумент33 страницыIndustrial AutomationTimothy FieldsОценок пока нет
- Grade 6 ProjAN Posttest-PrintДокумент8 страницGrade 6 ProjAN Posttest-PrintYa naОценок пока нет
- Xpac 2004 Release NotesДокумент11 страницXpac 2004 Release NotesAgustinus YosefОценок пока нет
- Cornet-ED-78S UserManualQeng PDFДокумент2 страницыCornet-ED-78S UserManualQeng PDFpdfjunkieОценок пока нет
- Tps60403-q1 (Charge Pump) Signal CondДокумент29 страницTps60403-q1 (Charge Pump) Signal CondCH Pavan KumarОценок пока нет
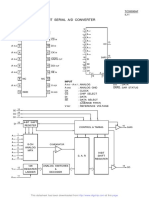
- C-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DOДокумент1 страницаC-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DOAsep TatangОценок пока нет
- Gtu Micro Processor PracticalДокумент79 страницGtu Micro Processor Practicalbaba100% (1)
- QuestionДокумент6 страницQuestionVj Sudhan100% (3)
- Module 1 Keyword ResearchДокумент29 страницModule 1 Keyword Researchalfian gunadiОценок пока нет
- Administering Oracle Database Exadata Cloud ServiceДокумент200 страницAdministering Oracle Database Exadata Cloud ServiceMuneeza HashmiОценок пока нет
- Amazfit Bip U User Guide: ContentДокумент48 страницAmazfit Bip U User Guide: ContentbadriharishОценок пока нет
- Hci RCHSD Capstone PresentationДокумент2 страницыHci RCHSD Capstone Presentationapi-583841034Оценок пока нет
- ACS355 Product Presentation RevAДокумент19 страницACS355 Product Presentation RevAsayedmhОценок пока нет
- Spatial AnalysisДокумент91 страницаSpatial Analysischiradzulu83% (6)
- Book 5: Magnetcode For 2-Axis Robot ArmДокумент41 страницаBook 5: Magnetcode For 2-Axis Robot ArmHusna AdilaОценок пока нет
- ME302-Syllabus - ME-302 Mechanical Systems IIДокумент2 страницыME302-Syllabus - ME-302 Mechanical Systems IIد.محمد كسابОценок пока нет
- 3BHS233287 E80 AbbДокумент15 страниц3BHS233287 E80 Abbsabah nooriОценок пока нет
- Service Manual: ChassisДокумент66 страницService Manual: ChassisAsnake TegenawОценок пока нет
- Combi Rebarbadora - 3 601 H20 8E0 - GWS 8-115Документ4 страницыCombi Rebarbadora - 3 601 H20 8E0 - GWS 8-115antonyОценок пока нет
- SQL CCДокумент457 страницSQL CCManish SinghОценок пока нет
- Microprocessors and InterfacingДокумент125 страницMicroprocessors and InterfacingRaja SekharОценок пока нет
- Siemens 840D Programing Manual enДокумент215 страницSiemens 840D Programing Manual enalejandro777_eОценок пока нет
- Tutorial-3 With SolutionsДокумент3 страницыTutorial-3 With SolutionsSandesh RSОценок пока нет
- Internet-Of-Things (Iot) : Summer Engineering Program 2018 University of Notre DameДокумент42 страницыInternet-Of-Things (Iot) : Summer Engineering Program 2018 University of Notre DameMAFOQ UL HASSANОценок пока нет
- Management Information System: Case Study ofДокумент7 страницManagement Information System: Case Study ofAnonymous YSA8CZ0Tz50% (1)
- Doom SourceДокумент818 страницDoom SourceEvil-Soft.comОценок пока нет
- Wireless World 1962 01Документ62 страницыWireless World 1962 01Jan PranОценок пока нет
- Exp 2Документ4 страницыExp 2tahiaОценок пока нет
- Computer Basics: What Is An Application?Документ4 страницыComputer Basics: What Is An Application?Ser Crz JyОценок пока нет