Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Object Oriented SRS - Elevator ProjectДокумент53 страницыObject Oriented SRS - Elevator ProjectAkshat SinhaОценок пока нет
- CN 3rd Unit MCQ 130Документ19 страницCN 3rd Unit MCQ 130Mohanaprakash Ece100% (1)
- MPMC Ec8691 Lab ManualДокумент107 страницMPMC Ec8691 Lab ManualMohanaprakash Ece71% (7)
- CN MCQ All Units 74Документ16 страницCN MCQ All Units 74Mohanaprakash EceОценок пока нет
- CN 4th Unit MCQ 160Документ30 страницCN 4th Unit MCQ 160Mohanaprakash EceОценок пока нет
- CN 5th Unit MCQ 173Документ25 страницCN 5th Unit MCQ 173Mohanaprakash EceОценок пока нет
- Ec 6001 Apr May 2018Документ2 страницыEc 6001 Apr May 2018Mohanaprakash EceОценок пока нет
- TCP/IP Protocol Suite and Networking Fundamentals QuizДокумент39 страницTCP/IP Protocol Suite and Networking Fundamentals QuizMohanaprakash EceОценок пока нет
- IP Fundamentals Quiz: Key Concepts on IP Addressing, ICMP, Fragmentation & MoreДокумент28 страницIP Fundamentals Quiz: Key Concepts on IP Addressing, ICMP, Fragmentation & MoreMohanaprakash EceОценок пока нет
- Ec6404 Linear Integrated Circuits Nov Dec 2017 Reg 2013Документ3 страницыEc6404 Linear Integrated Circuits Nov Dec 2017 Reg 2013Mohanaprakash EceОценок пока нет
- Aph 2018-19Документ258 страницAph 2018-19mailabhikeshОценок пока нет
- WCДокумент1 страницаWCJ.Gowri ShankarОценок пока нет
- WCДокумент1 страницаWCJ.Gowri ShankarОценок пока нет
- Ec6801 Wireless Communication Reg 2013 Nov Dec 2015Документ4 страницыEc6801 Wireless Communication Reg 2013 Nov Dec 2015Mohanaprakash EceОценок пока нет
- EC6801Документ2 страницыEC6801Mohanaprakash EceОценок пока нет
- Digital Manual FOR II CSEДокумент49 страницDigital Manual FOR II CSEMohanaprakash EceОценок пока нет
- NewsletterДокумент2 страницыNewsletterMohanaprakash EceОценок пока нет
- Digital Manual FOR II CSEДокумент49 страницDigital Manual FOR II CSEMohanaprakash EceОценок пока нет
- Computer Architecture Two Mark QuestionsДокумент9 страницComputer Architecture Two Mark QuestionsMohanaprakash EceОценок пока нет
- Ap7301 Emi&Emc NotesДокумент126 страницAp7301 Emi&Emc NotesMohanaprakash EceОценок пока нет
- Gradient Magnitude Similarity DeviationДокумент12 страницGradient Magnitude Similarity DeviationMohanaprakash EceОценок пока нет
- Readmission Transfer Later Entry InstructionsДокумент1 страницаReadmission Transfer Later Entry InstructionsMohanaprakash EceОценок пока нет
- Final - Approval Process Handbook 2017-18Документ274 страницыFinal - Approval Process Handbook 2017-18Mohanaprakash EceОценок пока нет
- QP Esd Lab IiДокумент1 страницаQP Esd Lab IiMohanaprakash EceОценок пока нет
- Gradian Magnitude Similarity DeviationДокумент4 страницыGradian Magnitude Similarity DeviationMohanaprakash EceОценок пока нет
- List of Software Companies in IndiaДокумент158 страницList of Software Companies in IndiaSurya HarishОценок пока нет
- Gradient Magnitude Similarity DeviationДокумент12 страницGradient Magnitude Similarity DeviationMohanaprakash EceОценок пока нет
- Stationary and WSS Processes DefinedДокумент1 страницаStationary and WSS Processes DefinedMohanaprakash EceОценок пока нет
- 07/03/15 1 BiodiversityДокумент10 страниц07/03/15 1 BiodiversityMohanaprakash EceОценок пока нет
- EVS 2marks - 2012 EditionДокумент20 страницEVS 2marks - 2012 EditionMohanaprakash EceОценок пока нет
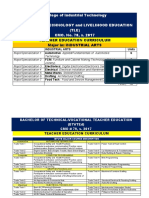
- College of Industrial Technology Bachelor of Technology and Livelihood Education (TLE) CMO. No. 78, S. 2017Документ5 страницCollege of Industrial Technology Bachelor of Technology and Livelihood Education (TLE) CMO. No. 78, S. 2017Industrial TechnologyОценок пока нет
- Intelligent Solar Tracking Control System Implemented On An FPGAДокумент30 страницIntelligent Solar Tracking Control System Implemented On An FPGAMurat Yasar ERTASОценок пока нет
- Brochure Deltav Dcs Platform Deltav en 7217850Документ46 страницBrochure Deltav Dcs Platform Deltav en 7217850vivekchandernОценок пока нет
- Embedded System Lession PlanДокумент4 страницыEmbedded System Lession PlanMATHANKUMAR.SОценок пока нет
- Train Collision PPT 1 ArduinoДокумент12 страницTrain Collision PPT 1 ArduinoVENKAT KEERTHIОценок пока нет
- 2011 Oregon State Mars Rover Design ReportДокумент31 страница2011 Oregon State Mars Rover Design Reportuditagarwal1997Оценок пока нет
- Real Time Transformer Health Monitoring System Using IOTДокумент7 страницReal Time Transformer Health Monitoring System Using IOTswethaОценок пока нет
- LISA U2 Whitepaper (3G.G3 X 12000)Документ9 страницLISA U2 Whitepaper (3G.G3 X 12000)r_azuaОценок пока нет
- Introduction to Embedded Systems Unit TwoДокумент19 страницIntroduction to Embedded Systems Unit TwoAarti DhotreОценок пока нет
- MCLab Manual FinalДокумент58 страницMCLab Manual FinalSaikrishnaОценок пока нет
- CENG-336 Introduction To Embedded Systems DevelopmentДокумент50 страницCENG-336 Introduction To Embedded Systems DevelopmentIngo SОценок пока нет
- Embedded Coder Getting Started GuideДокумент118 страницEmbedded Coder Getting Started GuideKjfsa TuОценок пока нет
- Arnold S. Berger - Embedded Systems Design - An Introduction To Processes, Tools, and Techniques-CMP Books (2001)Документ1 страницаArnold S. Berger - Embedded Systems Design - An Introduction To Processes, Tools, and Techniques-CMP Books (2001)Anonymous 6WoK61sYpyОценок пока нет
- CAE1 Time Table - (Except First Year and Final Year Students) - Even Sem 2021-22Документ21 страницаCAE1 Time Table - (Except First Year and Final Year Students) - Even Sem 2021-22Praveen kumarОценок пока нет
- SMS Controlled Industrial Controller Body Motion Information Collection Solar Based Electromagnetic Braking SystemДокумент17 страницSMS Controlled Industrial Controller Body Motion Information Collection Solar Based Electromagnetic Braking Systemrahulmpawar90Оценок пока нет
- Chapter - 1Документ31 страницаChapter - 1Ronanki RaviОценок пока нет
- What is an embedded systemДокумент8 страницWhat is an embedded systemJames FrankОценок пока нет
- MODICON M251 - Programming GuideДокумент232 страницыMODICON M251 - Programming GuideGustavo SОценок пока нет
- Report On Object Detection Using YOLOДокумент29 страницReport On Object Detection Using YOLOSukanya NОценок пока нет
- Report On Embedded & IoT Final3Документ6 страницReport On Embedded & IoT Final3Vi LОценок пока нет
- Aucr 2008Документ57 страницAucr 2008Sabik NainarОценок пока нет
- RTOS Marketstudy-V3Документ33 страницыRTOS Marketstudy-V3IRFAN RAWAIL KHANОценок пока нет
- Linux and Programming in C++Документ25 страницLinux and Programming in C++dhivya aОценок пока нет
- DVR LES+LEA+CdfaMSДокумент12 страницDVR LES+LEA+CdfaMSRadmanovic Uros Mrmy100% (1)
- Linux Kernel TutorialsДокумент475 страницLinux Kernel Tutorialsatom tuxОценок пока нет
- Segger Eval SoftwareДокумент24 страницыSegger Eval Softwarefercho573Оценок пока нет
- EE 316 SyllabusДокумент3 страницыEE 316 SyllabusJeya MuraliОценок пока нет
- Home Automation Using ArduinoДокумент8 страницHome Automation Using Arduinodarsu NaikОценок пока нет
- Modicon M221 Logic Controllers: Catalogue 2014Документ32 страницыModicon M221 Logic Controllers: Catalogue 2014Bayanaka TehnikОценок пока нет