Вам также может понравиться
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- 110 Waveform Generator Projects for the Home ConstructorОт Everand110 Waveform Generator Projects for the Home ConstructorРейтинг: 4 из 5 звезд4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- B767 Equipment CoolingДокумент3 страницыB767 Equipment CoolingGustavo Avila Rodriguez0% (1)
- Chapter 1 - Differential EquationsДокумент27 страницChapter 1 - Differential EquationsAbdul AddaharyОценок пока нет
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsОт EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsОценок пока нет
- 66kv Earthing System R-1 (For Print Out)Документ8 страниц66kv Earthing System R-1 (For Print Out)g_nraja100% (1)
- Mooring Line Management SNAME 1994 PDFДокумент8 страницMooring Line Management SNAME 1994 PDFLe Phuong DongОценок пока нет
- Hydrogen Permeability and Integrity of Hydrogen Transfer PipelinesДокумент52 страницыHydrogen Permeability and Integrity of Hydrogen Transfer PipelineslaercioudescОценок пока нет
- Shotcrete Support Load CalculationsДокумент6 страницShotcrete Support Load Calculationsanon_160157252Оценок пока нет
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1От EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Рейтинг: 4.5 из 5 звезд4.5/5 (3)
- Maintenance Engineer PDFДокумент4 страницыMaintenance Engineer PDFMasroor RasoolОценок пока нет
- Sla 7027Документ8 страницSla 7027manuals2011Оценок пока нет
- Tda 2593Документ6 страницTda 2593Luis Arturo Leiva MonjarasОценок пока нет
- B1660NДокумент9 страницB1660NchipquangdtОценок пока нет
- Linear Technology LTC3728EG28400Документ37 страницLinear Technology LTC3728EG28400Rickz2k8Оценок пока нет
- MC3479 Stepper Motor Driver: FeaturesДокумент10 страницMC3479 Stepper Motor Driver: FeaturesHenry CastandОценок пока нет
- L6208D To L6208PDДокумент16 страницL6208D To L6208PDwtn2013Оценок пока нет
- High Voltage Resonant Controller: DescriptionДокумент17 страницHigh Voltage Resonant Controller: DescriptionJesus SilvaОценок пока нет
- Ltc1629/Ltc1629-Pg Polyphase, High Efficiency, Synchronous Step-Down Switching RegulatorsДокумент28 страницLtc1629/Ltc1629-Pg Polyphase, High Efficiency, Synchronous Step-Down Switching Regulatorscatsoithahuong84Оценок пока нет
- LB1824 Motor DriverДокумент10 страницLB1824 Motor Driverwhynot05Оценок пока нет
- LM78S40 Universal Switching Regulator Subsystem: General Description FeaturesДокумент9 страницLM78S40 Universal Switching Regulator Subsystem: General Description FeaturesgusguicorОценок пока нет
- Fs 276 LFV 02Документ12 страницFs 276 LFV 02Pablo MgОценок пока нет
- 2-Phase Stepper Motor Unipolar Driver Ics: Absolute Maximum RatingsДокумент7 страниц2-Phase Stepper Motor Unipolar Driver Ics: Absolute Maximum RatingsCalin LuchianОценок пока нет
- Sla7024 26 29mДокумент12 страницSla7024 26 29mbashtavОценок пока нет
- Sla7024m PDFДокумент12 страницSla7024m PDFEJASMANYОценок пока нет
- Stepper Motor Controllers: DescriptionДокумент12 страницStepper Motor Controllers: DescriptionGigi TyireanОценок пока нет
- Ha 13563Документ18 страницHa 13563Danh ProОценок пока нет
- Sla7024m (Motor Driver)Документ13 страницSla7024m (Motor Driver)Franklin Miranda RoblesОценок пока нет
- Features Descriptio: LTC485 Low Power RS485 Interface TransceiverДокумент12 страницFeatures Descriptio: LTC485 Low Power RS485 Interface TransceiverSidumisile SikhosanaОценок пока нет
- FP 6321Документ11 страницFP 6321Ahmed HussainОценок пока нет
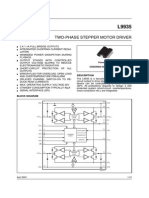
- Two-Phase Stepper Motor Driver: DescriptionДокумент19 страницTwo-Phase Stepper Motor Driver: DescriptionDan EsentherОценок пока нет
- 7214Документ12 страниц7214Dan EsentherОценок пока нет
- A 2918 SW Data SheetДокумент8 страницA 2918 SW Data SheetGustavo LunaОценок пока нет
- A3953 DatasheetДокумент12 страницA3953 DatasheetMohan RajОценок пока нет
- Bit 3713Документ24 страницыBit 3713neckoprvak5Оценок пока нет
- TX-2B/RX-2B: Silan SemiconductorsДокумент10 страницTX-2B/RX-2B: Silan SemiconductorstrungphachОценок пока нет
- Mach Cong Suat Cau H - Lmd18200Документ14 страницMach Cong Suat Cau H - Lmd18200hieuhuech1Оценок пока нет
- Data Sheet Ic fr9886Документ14 страницData Sheet Ic fr9886Setya Budi S100% (1)
- Thb7128 InstructionsДокумент9 страницThb7128 InstructionsanhxcoОценок пока нет
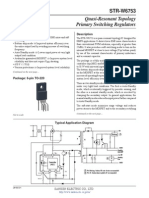
- STR W6753 DatasheetДокумент8 страницSTR W6753 DatasheetjgerabmОценок пока нет
- Uc3842b 3843BДокумент10 страницUc3842b 3843Bbob75Оценок пока нет
- UC3842B/3843B: Unisonic Technologies Co., LTDДокумент11 страницUC3842B/3843B: Unisonic Technologies Co., LTDvannadioОценок пока нет
- Datasheet PDFДокумент12 страницDatasheet PDFmhenley8059Оценок пока нет
- HS8108Документ8 страницHS8108Miloš ZorićОценок пока нет
- Features Description: LTC3707 High Effi Ciency, 2-Phase Synchronous Step-Down Switching RegulatorДокумент32 страницыFeatures Description: LTC3707 High Effi Ciency, 2-Phase Synchronous Step-Down Switching RegulatoruimОценок пока нет
- LB1823Документ12 страницLB1823oscmanОценок пока нет
- Data SheetДокумент14 страницData SheetGavril GiurgiОценок пока нет
- TL494 BДокумент14 страницTL494 BOscar Solano NegreteОценок пока нет
- 8205Документ16 страниц8205sonytinОценок пока нет
- UDN2916Документ10 страницUDN2916ejoaomelchiorsОценок пока нет
- Hef 4752Документ9 страницHef 4752onlyvinod56Оценок пока нет
- Features Description: Ltc4253B - 48V Hot Swap Controller With SequencerДокумент32 страницыFeatures Description: Ltc4253B - 48V Hot Swap Controller With SequencerrotenolabsОценок пока нет
- LT1618 DatasheetДокумент16 страницLT1618 DatasheetkurabyqldОценок пока нет
- Switching Regulator Control Ic For Flyback: NJM2368D NJM2368MДокумент7 страницSwitching Regulator Control Ic For Flyback: NJM2368D NJM2368MArturo Rodriguez LeonОценок пока нет
- Dual Full-Bridge Driver: DescriptionДокумент13 страницDual Full-Bridge Driver: DescriptionBaher Bassem MorkosОценок пока нет
- STRW6252Документ15 страницSTRW6252miltoncgОценок пока нет
- Ir 2156Документ24 страницыIr 2156anon_702708521Оценок пока нет
- Subscriber Line Interface Circuit: DescriptionДокумент22 страницыSubscriber Line Interface Circuit: DescriptionLam Nguyen DuyОценок пока нет
- Fan 7314Документ14 страницFan 7314Kamal NonekОценок пока нет
- Datasheet L6229Документ25 страницDatasheet L6229Raul Sense MejiaОценок пока нет
- LMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CДокумент14 страницLMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CIrfan AbbasiОценок пока нет
- PWM ControllerДокумент20 страницPWM ControllerAmrit203Оценок пока нет
- TL494Документ13 страницTL494OVALLEPAОценок пока нет
- Somebasictermsinthermo 160110182538Документ27 страницSomebasictermsinthermo 160110182538raja singamОценок пока нет
- Intergreen TimeДокумент2 страницыIntergreen TimeMd Didarul AlamОценок пока нет
- Introduction and Basic Concepts: Fluid Mechanics: Fundamentals and ApplicationsДокумент21 страницаIntroduction and Basic Concepts: Fluid Mechanics: Fundamentals and ApplicationsAhmedalaal LotfyОценок пока нет
- 31-XX29-6Документ1 страница31-XX29-6rohitkush100% (1)
- Math 54 Le5Документ1 страницаMath 54 Le5Lester Jason T. ChengОценок пока нет
- Environmental Science 14th Edition Miller Solutions ManualДокумент25 страницEnvironmental Science 14th Edition Miller Solutions ManualCassieTurnerqszj100% (52)
- Sco-2120r Datasheet PDFДокумент2 страницыSco-2120r Datasheet PDFjdearОценок пока нет
- TG40E80 PDF, TG40E80 Description, TG40E80 Datasheets, TG40E80 View - ALLDATASHEETДокумент2 страницыTG40E80 PDF, TG40E80 Description, TG40E80 Datasheets, TG40E80 View - ALLDATASHEETInas Ratnaning ZafirahОценок пока нет
- CmpE Degree RequirementsДокумент3 страницыCmpE Degree RequirementsTrai TranОценок пока нет
- Thesis D KroonДокумент159 страницThesis D KroonAndrei AdiОценок пока нет
- Manufacturing of Turbo GenratorsДокумент27 страницManufacturing of Turbo Genratorspavan6754Оценок пока нет
- Report 4071 - EN6115-4 SPS TITAN (2.1MB)Документ34 страницыReport 4071 - EN6115-4 SPS TITAN (2.1MB)pcosro0% (1)
- PT2.3 Mirrors Answer SheetДокумент6 страницPT2.3 Mirrors Answer SheetMarionne HerreraОценок пока нет
- Physics for Scientists and Engineers Introduction and Chapter 1 SummaryДокумент20 страницPhysics for Scientists and Engineers Introduction and Chapter 1 SummaryYana IshakОценок пока нет
- Cha 2Документ52 страницыCha 2yaredОценок пока нет
- Temp CycloneДокумент19 страницTemp CycloneDarshan KanganeОценок пока нет
- Radiation Heat Transfer: Chapter SevenДокумент13 страницRadiation Heat Transfer: Chapter SevenprasanthiОценок пока нет
- Comprehensive Literature Review On Use of Waste Product in ConcreteДокумент8 страницComprehensive Literature Review On Use of Waste Product in ConcreteInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- Lab 7 - Thevenin and Norton Equivalent CircuitsДокумент9 страницLab 7 - Thevenin and Norton Equivalent CircuitsaliОценок пока нет
- AT2351 Automotive Engine Components Design May - Jun 2014Документ3 страницыAT2351 Automotive Engine Components Design May - Jun 2014pavanraneОценок пока нет
- Nano-Emulsions: New Applications and Optimization of Their PreparationДокумент7 страницNano-Emulsions: New Applications and Optimization of Their PreparationYuli CartrinaОценок пока нет
- Understanding the History and Properties of ElectricityДокумент4 страницыUnderstanding the History and Properties of Electricitymyco sauraОценок пока нет
- Module 0 Resource Guide2014 Editionv5Документ30 страницModule 0 Resource Guide2014 Editionv5vamshids67% (3)