Вам также может понравиться
- Construction of Three Phase Induction MotorДокумент6 страницConstruction of Three Phase Induction MotorMuhammadZaydArattKhanОценок пока нет
- Synchronous Machine ChapterДокумент27 страницSynchronous Machine ChapternaaventhenОценок пока нет
- LEC # 08 Distribution System Voltage RegulationДокумент61 страницаLEC # 08 Distribution System Voltage RegulationSaddam jatt786Оценок пока нет
- Introduction For Power TransformerДокумент16 страницIntroduction For Power TransformerBrahmpal BhardwajОценок пока нет
- VFD PptsДокумент12 страницVFD PptsSujith KumarОценок пока нет
- Transformer Construction: Core, Windings, Tank, Cooling MethodsДокумент23 страницыTransformer Construction: Core, Windings, Tank, Cooling MethodsOscar Kelvin NsituОценок пока нет
- Basic TransformerДокумент10 страницBasic TransformerPin SantosОценок пока нет
- Starting methods and speed control of induction motorsДокумент10 страницStarting methods and speed control of induction motorsfebriОценок пока нет
- Maintaining Electric Motors and ControlsДокумент102 страницыMaintaining Electric Motors and ControlsRajeev ValunjkarОценок пока нет
- CH 3 - Induction MotorsДокумент46 страницCH 3 - Induction MotorsMiz AelyfhaОценок пока нет
- Universal Motors: Presented by Meraj WarsiДокумент13 страницUniversal Motors: Presented by Meraj WarsiMeraj WarsiОценок пока нет
- MCB or MCCBДокумент4 страницыMCB or MCCBKurnia FajarОценок пока нет
- (GATE NOTES) Fluid Mechanics - Handwritten GATE IES AEE GENCO PSU - Ace Academy Notes - Free Download PDF - CivilEnggForAll PDFДокумент224 страницы(GATE NOTES) Fluid Mechanics - Handwritten GATE IES AEE GENCO PSU - Ace Academy Notes - Free Download PDF - CivilEnggForAll PDFSarish KumarОценок пока нет
- ElectricMotorGreasing PDFДокумент6 страницElectricMotorGreasing PDFHemraj Singh RautelaОценок пока нет
- Litar Siri Dan SelariДокумент19 страницLitar Siri Dan SelarineddylalolaОценок пока нет
- MCB & MCCBДокумент1 страницаMCB & MCCBAyaz ButtОценок пока нет
- Construction of TransformerДокумент33 страницыConstruction of TransformervurumuuОценок пока нет
- MetalEnclosedCapacitor ApplicationGuide en 110A LTR 2018 04 R001 LRДокумент12 страницMetalEnclosedCapacitor ApplicationGuide en 110A LTR 2018 04 R001 LRMuhammad FarazОценок пока нет
- Construction and Working of 3 Phase Induction MotorДокумент3 страницыConstruction and Working of 3 Phase Induction MotorArdyas Wisnu BaskoroОценок пока нет
- NEMA & General Purpose Controls IC14 - Sect09Документ186 страницNEMA & General Purpose Controls IC14 - Sect094685752Оценок пока нет
- Single Phase Induction MotorДокумент14 страницSingle Phase Induction MotorSuvra Pattanayak100% (1)
- Electrical Installation GuideДокумент30 страницElectrical Installation GuideMohamad Taib Miskon100% (1)
- A Three Phase Induction Motor Is Basically A Constant Speed Motor So ItДокумент39 страницA Three Phase Induction Motor Is Basically A Constant Speed Motor So ItManish MakwanaОценок пока нет
- Auto TransformerДокумент22 страницыAuto TransformerNANDHAKUMAR AОценок пока нет
- W&B Esp BasicДокумент12 страницW&B Esp BasicGanesh KumarОценок пока нет
- 45 24985 EE328 2016 1 2 1 Lecture7Документ11 страниц45 24985 EE328 2016 1 2 1 Lecture7Shimaa ashrafОценок пока нет
- M.Tech Power System PDFДокумент30 страницM.Tech Power System PDFRaja RamachandranОценок пока нет
- Induction MotorДокумент43 страницыInduction MotorJanine Jade SetiasОценок пока нет
- Induction Motor GuideДокумент45 страницInduction Motor GuideRevki 'Exiit'Оценок пока нет
- Induction Motor (ALL TOPICS)Документ33 страницыInduction Motor (ALL TOPICS)Ramprakash89% (18)
- Lecture 3 and 4 TransformerДокумент29 страницLecture 3 and 4 TransformernehalОценок пока нет
- AC MotorДокумент71 страницаAC Motorstallone21Оценок пока нет
- Wind Energy Potential in BangladeshДокумент10 страницWind Energy Potential in BangladeshAJER JOURNALОценок пока нет
- Lightning ArresterДокумент1 страницаLightning ArresterShubham GhoreОценок пока нет
- Ch7 Induction MotorДокумент82 страницыCh7 Induction MotorMuhammad R ShihadehОценок пока нет
- Electric Machinery: Powerpoint SlidesДокумент49 страницElectric Machinery: Powerpoint SlidesKesalan TerasaОценок пока нет
- Wind Energy Full Length PaperДокумент6 страницWind Energy Full Length PaperSandeep DhupalОценок пока нет
- Rewind Motor BrushlessДокумент11 страницRewind Motor Brushlesssharingiscaring69Оценок пока нет
- Difference Between Single Phase Wiring and Three Phase (Latest)Документ14 страницDifference Between Single Phase Wiring and Three Phase (Latest)shumwenjunОценок пока нет
- Ac MotorsДокумент22 страницыAc MotorsHumberto Andrade DomìnguezОценок пока нет
- Electrical Machines: Induction Motors - NoteДокумент41 страницаElectrical Machines: Induction Motors - NotealeeshaОценок пока нет
- Hunting in Synchronous Motor - Electrical4u PDFДокумент5 страницHunting in Synchronous Motor - Electrical4u PDFRishiSunariya0% (1)
- Introduction To Electrical Power SystemДокумент68 страницIntroduction To Electrical Power SystemMonirul Islam100% (1)
- Motor Temperature Ratings: DefinitionsДокумент4 страницыMotor Temperature Ratings: DefinitionstekhakkoОценок пока нет
- Air Blast Circuit BreakerДокумент19 страницAir Blast Circuit Breakerkuttr100% (5)
- Module 19: Transformers and Circuit BreakersДокумент67 страницModule 19: Transformers and Circuit BreakersDipayan DasОценок пока нет
- L & T Catalogue 8Документ3 страницыL & T Catalogue 8amulya00428Оценок пока нет
- TEKNOLOGI ELEKTRIK 1 - VoltageДокумент10 страницTEKNOLOGI ELEKTRIK 1 - Voltagehazreen othman100% (1)
- Working principle and construction of a transformerДокумент67 страницWorking principle and construction of a transformermartinez_josel100% (1)
- 01-Report Bagasse CogenerationДокумент72 страницы01-Report Bagasse CogenerationMazhar UddeenОценок пока нет
- 4 Starting-Characterstics-of-AC-and-DC-Motors (1) PRESENTATIONДокумент14 страниц4 Starting-Characterstics-of-AC-and-DC-Motors (1) PRESENTATIONEloisa FabroaОценок пока нет
- EEE 471 Transient StabilityДокумент31 страницаEEE 471 Transient StabilityFrew FrewОценок пока нет
- Induction Motors: Presentation by S.R.Paraskar Electrical Dept SSGMCEДокумент22 страницыInduction Motors: Presentation by S.R.Paraskar Electrical Dept SSGMCEdoss mОценок пока нет
- International Refereed Journal of Engineering and Science (IRJES)Документ8 страницInternational Refereed Journal of Engineering and Science (IRJES)www.irjes.comОценок пока нет
- Circuit Breaker Ppt2018Документ16 страницCircuit Breaker Ppt2018Subhajit JoydharОценок пока нет
- Comparison Between Vacuum & SF6 Circuit BreakerДокумент9 страницComparison Between Vacuum & SF6 Circuit BreakermaungsoekhinОценок пока нет
- Breaker Failure Protection: PSRC - K2 WGДокумент32 страницыBreaker Failure Protection: PSRC - K2 WG1453hОценок пока нет
- GE Multilin 369 SpecificationsДокумент11 страницGE Multilin 369 SpecificationsMichael adu-boahenОценок пока нет
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977От EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Оценок пока нет
- Honeywell Experion System For Teaching Purposes: Year 2013Документ60 страницHoneywell Experion System For Teaching Purposes: Year 2013koushikОценок пока нет
- 9 - TroubleshootingДокумент44 страницы9 - TroubleshootingMichele Bacocchia100% (1)
- IC Design TechniquesДокумент1 страницаIC Design TechniqueskoushikОценок пока нет
- TS-ELEC-04 - Specification of Electric Cables - R0Документ31 страницаTS-ELEC-04 - Specification of Electric Cables - R0koushikОценок пока нет
- PROFIsafe System Description V 2010 EnglishДокумент26 страницPROFIsafe System Description V 2010 EnglishkoushikОценок пока нет
- KKLДокумент11 страницKKLkoushikОценок пока нет
- PLC Soft Master ML200Документ478 страницPLC Soft Master ML200koushik100% (1)
- Tutorial 83Документ14 страницTutorial 83koushikОценок пока нет
- PC Troubleshooting Is Becoming Less Common in Larger OrganizationsДокумент4 страницыPC Troubleshooting Is Becoming Less Common in Larger OrganizationskoushikОценок пока нет
- Ethernet cable color coding and standards guideДокумент3 страницыEthernet cable color coding and standards guidebseggafОценок пока нет
- Society - PDF BantiДокумент27 страницSociety - PDF BantikoushikОценок пока нет
- RRBДокумент13 страницRRBJeshiОценок пока нет
- When You Are On The Internet or Are Working in An Networked Environment You May Think You Have Problems With Your Network ConnectionДокумент9 страницWhen You Are On The Internet or Are Working in An Networked Environment You May Think You Have Problems With Your Network ConnectionkoushikОценок пока нет
- Network CablesДокумент19 страницNetwork CablesAli SiddiquiОценок пока нет
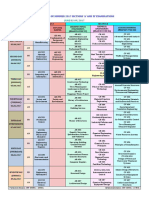
- Programme of Summer 2017 Sections A' and B' Examinations: JUNE 03-09, 2017Документ3 страницыProgramme of Summer 2017 Sections A' and B' Examinations: JUNE 03-09, 2017Anurag PandeyОценок пока нет
- S7-1200 HMI Time Sync HowTo e PDFДокумент18 страницS7-1200 HMI Time Sync HowTo e PDFRoberto Matheus JuniorОценок пока нет
- Presentation - Thomas W - ECO - Wireless Medical Frequencies 18 Jan 2012Документ10 страницPresentation - Thomas W - ECO - Wireless Medical Frequencies 18 Jan 2012koushikОценок пока нет
- Step 7 MicrowinДокумент546 страницStep 7 Microwinabraham84Оценок пока нет
- NMAP Reference GuideДокумент37 страницNMAP Reference GuideombidasarОценок пока нет
- Hydraulic Proportional Closed Loop System Design PDFДокумент86 страницHydraulic Proportional Closed Loop System Design PDFragdapattice100% (7)
- Discharge ModelДокумент186 страницDischarge ModelSigit KurniawanОценок пока нет
- DFX GuidelinesДокумент95 страницDFX GuidelinesAkash VermaОценок пока нет
- EV7748S-F-00A: 2.1 Channels SE and BTL Class D Audio Amplifier Evaluation BoardДокумент8 страницEV7748S-F-00A: 2.1 Channels SE and BTL Class D Audio Amplifier Evaluation BoardJesus fuentesОценок пока нет
- LEMDДокумент1 страницаLEMDRam PmvОценок пока нет
- Mach Cong Suat Cau H - Lmd18200Документ14 страницMach Cong Suat Cau H - Lmd18200hieuhuech1Оценок пока нет
- HNC 21T Operation v3.3Документ125 страницHNC 21T Operation v3.3roanramoОценок пока нет
- Report On State Estimator PublicДокумент160 страницReport On State Estimator Publickrcdewanew100% (1)
- Lecture 2 High Level Vs Low Level LanguagesДокумент5 страницLecture 2 High Level Vs Low Level Languagesapi-3739389100% (2)
- EBE Electronic EngineeringДокумент51 страницаEBE Electronic EngineeringImisebe TelecomsОценок пока нет
- 3 CurrentElectricity UNACADEMY-FINALДокумент59 страниц3 CurrentElectricity UNACADEMY-FINALAaryan KeshanОценок пока нет
- EI8075 FOLI exam questions for 4-EEE departmentДокумент8 страницEI8075 FOLI exam questions for 4-EEE departmentS.Dhandayuthapani SundaramoorthyОценок пока нет
- BDA 30703 Sem 1 1213 PDFДокумент7 страницBDA 30703 Sem 1 1213 PDFJevine LaiОценок пока нет
- 57 - Linear Predictive Coding PDFДокумент7 страниц57 - Linear Predictive Coding PDFJeya Shree Arunjunai RajОценок пока нет
- Multifunctional Capability With Seamless Transition of Three-Phase Grid Using FLMF Control ApproachДокумент6 страницMultifunctional Capability With Seamless Transition of Three-Phase Grid Using FLMF Control ApproachRAJDIP DEBNATHОценок пока нет
- O2 Sensor Simulator CircuitДокумент4 страницыO2 Sensor Simulator CircuitTeddy Khant100% (1)
- D3000 97018Документ156 страницD3000 97018JorgeLuОценок пока нет
- Cellular ConceptДокумент130 страницCellular Conceptsanjeevsoni64Оценок пока нет
- VIZIOTRAININGGNPSC10Документ122 страницыVIZIOTRAININGGNPSC10slowend100% (1)
- 2001 Ford F150 ManualДокумент296 страниц2001 Ford F150 Manualerjenkins1100% (2)
- Chapter7 Refractometry - Book PartialДокумент18 страницChapter7 Refractometry - Book PartialVallik TadОценок пока нет
- CBLM - Assemble Electronic ProductsДокумент89 страницCBLM - Assemble Electronic ProductsAlfie LariosaОценок пока нет
- Flexible 3.2-Gsps Multichannel Afe Reference Design For Dsos, Radar, and 5G Wireless Test SystemsДокумент33 страницыFlexible 3.2-Gsps Multichannel Afe Reference Design For Dsos, Radar, and 5G Wireless Test Systemsrosmary rondonОценок пока нет
- Step7 s7 F FH Systems Operating Manual en-US en-USДокумент430 страницStep7 s7 F FH Systems Operating Manual en-US en-USabu_kannanОценок пока нет
- Canadian Solar 285 Watt Panel CS6X-285PДокумент3 страницыCanadian Solar 285 Watt Panel CS6X-285PTanneru Hemanth KumarОценок пока нет
- ® Low-Loss Foam-Dielectric Coaxial Cable: 1/2" CellflexДокумент2 страницы® Low-Loss Foam-Dielectric Coaxial Cable: 1/2" CellflexMateus Lucas de Campos e SilvaОценок пока нет
- IM-250 SP User GuideДокумент27 страницIM-250 SP User GuideLuis Antonio Hernandez CastroОценок пока нет
- 2007 RAM 1500 3.7L V6 P0509 IAC Valve Circuit HighДокумент4 страницы2007 RAM 1500 3.7L V6 P0509 IAC Valve Circuit HighWillie AustineОценок пока нет
- U-Series Air Circuit Breakers Technical GuideДокумент126 страницU-Series Air Circuit Breakers Technical GuideNguyễn Mạnh TuấnОценок пока нет
- Experiment-5:: Program DefinitionДокумент4 страницыExperiment-5:: Program DefinitionAmitabh KumarОценок пока нет
- ABV Full-Line CatalogДокумент40 страницABV Full-Line CatalogJulio ConfortoОценок пока нет