Вам также может понравиться
- Computos para El AjusteДокумент293 страницыComputos para El AjusteDoNpArCe100% (2)
- Geodesia PrácticaДокумент54 страницыGeodesia PrácticaCarlos Fuentes MirandaОценок пока нет
- Practica de Topografia PDFДокумент158 страницPractica de Topografia PDFLuis Cabrera AguilarОценок пока нет
- Ajuste Rene ZepedaДокумент67 страницAjuste Rene ZepedaWigher100% (1)
- Bolshakov y GaidáyevДокумент411 страницBolshakov y GaidáyevSANTIAGO RESTREPO CRUZОценок пока нет
- 10 GEO NivelacionДокумент25 страниц10 GEO NivelacionJesus Carlos Melgar SaucedoОценок пока нет
- Excel-Transformacion de CoordenadasДокумент7 страницExcel-Transformacion de CoordenadasElard HuisaОценок пока нет
- UTMa Topograficas Factor EscalaДокумент8 страницUTMa Topograficas Factor EscalaCarina Apana PalominoОценок пока нет
- Trabajo GeodesiaДокумент13 страницTrabajo GeodesiaManuel Fredy Aguedo LuceroОценок пока нет
- Ajuste Por Minimos CuadradosДокумент13 страницAjuste Por Minimos CuadradosGastón Hernán VillagraОценок пока нет
- Tema 03Документ20 страницTema 03Yhan ChalcoОценок пока нет
- Computos para El Ajuste - Lecciones Prácticas de Mínimos Cuadrados para Agrinm PDFДокумент293 страницыComputos para El Ajuste - Lecciones Prácticas de Mínimos Cuadrados para Agrinm PDFcarlos perezОценок пока нет
- Ajuste de ObservacionesДокумент34 страницыAjuste de ObservacionesEdgard Santiago Granados100% (1)
- Poligonal Geodesica PPДокумент8 страницPoligonal Geodesica PPPercy LimaОценок пока нет
- Libro de Geodesia y Cartografia MatematicaДокумент336 страницLibro de Geodesia y Cartografia MatematicaCesar VargasОценок пока нет
- Formulario de GeodesiaДокумент1 страницаFormulario de GeodesiaDiego JustinianoОценок пока нет
- NtripДокумент104 страницыNtripPaolo ChilleОценок пока нет
- Altimetria SatelitalДокумент80 страницAltimetria SatelitalAldryn LealОценок пока нет
- Guia 2016 TopografiaДокумент212 страницGuia 2016 TopografiaPe MarianОценок пока нет
- TEMA1 Geodesia PDFДокумент74 страницыTEMA1 Geodesia PDFJaime Terrazas GarciaОценок пока нет
- Desplazamiento Debido Al RelieveДокумент5 страницDesplazamiento Debido Al RelieveCamila QuinteroОценок пока нет
- Fotogrametria 1 Nestor Ivan Garcia MotatoДокумент22 страницыFotogrametria 1 Nestor Ivan Garcia MotatoMauricio Candiales0% (1)
- Cartografia Basada en SIRGASДокумент24 страницыCartografia Basada en SIRGASHugo José Luque NeiraОценок пока нет
- Ajuste de Poligonales-Eagle PointДокумент66 страницAjuste de Poligonales-Eagle PointMarun Navarro MartinezОценок пока нет
- 5 Metodologia Levantamiento Catastral LegalizacionДокумент192 страницы5 Metodologia Levantamiento Catastral LegalizacionDiana CyОценок пока нет
- Word Geodesia V1.0Документ201 страницаWord Geodesia V1.0Edú Moreno RiveraОценок пока нет
- Calculo de Vincenty para Triangulo Geodesico - Version 02Документ7 страницCalculo de Vincenty para Triangulo Geodesico - Version 02fernandoamelungeОценок пока нет
- Guía Metodológica de La Red Gravimétrica 2017Документ50 страницGuía Metodológica de La Red Gravimétrica 2017erenteriagОценок пока нет
- Transformacion UTM - GeograficasДокумент31 страницаTransformacion UTM - GeograficasFernando YanchaОценок пока нет
- Duran Celis Lucio - TopografíaДокумент105 страницDuran Celis Lucio - TopografíaAnonymous AEr8EDfmОценок пока нет
- Hoja de Calculo de PoligonalДокумент6 страницHoja de Calculo de PoligonalIvan Bautista IllescasОценок пока нет
- Guia de Topografia y Trazado Fe - Ing. Enrico Galli PDFДокумент81 страницаGuia de Topografia y Trazado Fe - Ing. Enrico Galli PDFJesus Emilio Machado CaraballoОценок пока нет
- Manual 2021 - Topografía Básica (4519)Документ104 страницыManual 2021 - Topografía Básica (4519)RedBlood Nick100% (1)
- Red Geodesica HorizontalДокумент28 страницRed Geodesica HorizontalHector ArteagaОценок пока нет
- Tema 5 - Determinación Del Acimut de Una DirecciónДокумент12 страницTema 5 - Determinación Del Acimut de Una DirecciónYesica Callizaya CallisayaОценок пока нет
- Geodesia GeometricaДокумент216 страницGeodesia GeometricaAnthony Fernadez VegaОценок пока нет
- Factor de Escala en El Meridiano CentralДокумент5 страницFactor de Escala en El Meridiano CentralItaloCardenas50% (2)
- Teoria Batimetria Tema 13Документ45 страницTeoria Batimetria Tema 13Claudia Boada FelipaОценок пока нет
- Problema de Los Tres PuntosДокумент7 страницProblema de Los Tres PuntosAngela Chumioque GarciaОценок пока нет
- ITRFДокумент113 страницITRFYONIER BERNEIDY LLANO MONTOYAОценок пока нет
- Libro para Subir de Levantamiento TopograficoДокумент150 страницLibro para Subir de Levantamiento Topograficoisai garcia cordova100% (1)
- Topografia Ii FormulasДокумент102 страницыTopografia Ii FormulasYonatan AvilesОценок пока нет
- Ajuste de Redes Gps - ActualizadoДокумент130 страницAjuste de Redes Gps - ActualizadoJulian David Henao EscobarОценок пока нет
- Diccionario TopografoДокумент258 страницDiccionario TopografoFreddyОценок пока нет
- Distancia Cuadricula, GeodesicaДокумент6 страницDistancia Cuadricula, GeodesicaFrank HAОценок пока нет
- Factor de EscalaДокумент4 страницыFactor de Escaladeybis ramirez riveraОценок пока нет
- Geodesia AplicadaДокумент55 страницGeodesia AplicadaCaballero de los MaresОценок пока нет
- Incertidumbre Observaciones TopograficasДокумент13 страницIncertidumbre Observaciones Topograficasgrefusito73Оценок пока нет
- Introduccion A La Topografia PlanaДокумент215 страницIntroduccion A La Topografia PlanaAlain Andres Villca SocompiОценок пока нет
- Geodesia Satelital Clase N°5 y N°6Документ48 страницGeodesia Satelital Clase N°5 y N°6juan ramirez huamanОценок пока нет
- Calculo de Coordenadas Geodesia TAREAДокумент9 страницCalculo de Coordenadas Geodesia TAREAJunior AlReОценок пока нет
- Manual Topografia PDFДокумент143 страницыManual Topografia PDFEder Lozano100% (1)
- Informe 1. Numero PiДокумент6 страницInforme 1. Numero Piblackher0Оценок пока нет
- Examenes de Topografia GeneralДокумент15 страницExamenes de Topografia GeneralJesus Angeles Vasquez100% (2)
- Primera TДокумент5 страницPrimera TLau AgudeloОценок пока нет
- Informe Fisica1Документ9 страницInforme Fisica1John EdwardОценок пока нет
- Ecuaciones EmpiricasДокумент13 страницEcuaciones EmpiricasIrvin SG80% (5)
- Laboratorio 2Документ6 страницLaboratorio 2karla ximena ceron sarriaОценок пока нет
- Correccion de Desplazamiento Debido Al RelieveДокумент4 страницыCorreccion de Desplazamiento Debido Al RelieveEmilce Trujillo BustosОценок пока нет
- Interpretación de mapas y planos topográficos y dibujo de planos sencillos. AGAJ0308От EverandInterpretación de mapas y planos topográficos y dibujo de planos sencillos. AGAJ0308Оценок пока нет
- COVID19 Sacyr 03 CHДокумент6 страницCOVID19 Sacyr 03 CHEduardo FuentesОценок пока нет
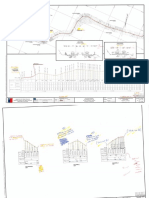
- Plano LlaveДокумент1 страницаPlano LlaveEduardo FuentesОценок пока нет
- Uso Obligatorio de MascarillasДокумент3 страницыUso Obligatorio de MascarillasEstebenke Medel Bernales100% (1)
- 03 Ingenierabsicaubb2010 100826145959 Phpapp02Документ23 страницы03 Ingenierabsicaubb2010 100826145959 Phpapp02Giovani Ramos MamaniОценок пока нет
- 0364 001Документ4 страницы0364 001Eduardo FuentesОценок пока нет
- Sistemas ProyeccionДокумент11 страницSistemas ProyeccionJohnnByronОценок пока нет
- 03 Hoyer GNSS en Tiempo RealДокумент17 страниц03 Hoyer GNSS en Tiempo RealMauricio Palacios BazaОценок пока нет
- Articles-31698 Recurso 12Документ14 страницArticles-31698 Recurso 12Eduardo FuentesОценок пока нет
- Informe Medición Mina El Pimiento - 3Документ14 страницInforme Medición Mina El Pimiento - 3Eduardo Fuentes100% (1)
- Guia Nº2Документ7 страницGuia Nº2Eduardo FuentesОценок пока нет
- Determinacion de Cuenca Visual de Una Cuenca Hidrológica de La Region MetropolitanaДокумент4 страницыDeterminacion de Cuenca Visual de Una Cuenca Hidrológica de La Region MetropolitanaEduardo FuentesОценок пока нет
- 684Документ6 страниц684JoelAguilarLoyolaОценок пока нет
- Medidas Del TiempoДокумент36 страницMedidas Del TiempoEduardo FuentesОценок пока нет
- Campo Gravitatorio - 1Документ33 страницыCampo Gravitatorio - 1Eduardo FuentesОценок пока нет
- Mundo de La Electronic A 1Документ16 страницMundo de La Electronic A 1api-3733793100% (1)
- Guia Nº8Документ34 страницыGuia Nº8Eduardo FuentesОценок пока нет
- Distancias ElectronicasДокумент11 страницDistancias ElectronicasEduardo FuentesОценок пока нет
- Ley Riego 18450 ChileДокумент48 страницLey Riego 18450 ChileEduardo FuentesОценок пока нет
- Apunte MacroeconomiaДокумент57 страницApunte MacroeconomiaEduardo FuentesОценок пока нет
- Guias de Geodesia IДокумент100 страницGuias de Geodesia IEduardo FuentesОценок пока нет
- Guia Nº1Документ10 страницGuia Nº1Eduardo FuentesОценок пока нет
- Guia Nº3Документ8 страницGuia Nº3Eduardo FuentesОценок пока нет
- Guia Nº2Документ15 страницGuia Nº2Eduardo FuentesОценок пока нет
- PEP 3 de Estadistica 1er Sem 2014Документ3 страницыPEP 3 de Estadistica 1er Sem 2014Eduardo Fuentes0% (1)
- Reyna Valera 1960Документ1 343 страницыReyna Valera 1960Siervo del SeñorОценок пока нет
- Arboles Nativos OKДокумент202 страницыArboles Nativos OKMariano Figueroa Ceron100% (4)
- Et110 3a Ovi7201 PDFДокумент2 страницыEt110 3a Ovi7201 PDFEduardo FuentesОценок пока нет
- El Ciclo HidrologicoДокумент9 страницEl Ciclo Hidrologicomenfis_77Оценок пока нет
- Metodos y Tecnicas de Terreno I PDFДокумент7 страницMetodos y Tecnicas de Terreno I PDFJohanne Diaz RiveraОценок пока нет
- Anexo 5 HidrotopografiaДокумент20 страницAnexo 5 HidrotopografiaclaloОценок пока нет
- Estudio TopograficoДокумент25 страницEstudio TopograficoJose Luis Maravi CastilloОценок пока нет
- La Flaca y El GordoДокумент26 страницLa Flaca y El GordoAlan Segovia RojasОценок пока нет
- Informe 005Документ40 страницInforme 005Fredy Elvis Pariona RzОценок пока нет
- Instrumentos TopográficosДокумент37 страницInstrumentos TopográficossheylaОценок пока нет
- TaquimetriaДокумент5 страницTaquimetriasilviaОценок пока нет
- Introduccion A La TopografiaДокумент25 страницIntroduccion A La TopografiafabiolaОценок пока нет
- 01 I3.1 Aplicaciones Topograficas OPERACIONДокумент22 страницы01 I3.1 Aplicaciones Topograficas OPERACIONtopotecnicaОценок пока нет
- Competencias Topografia y CaminosДокумент5 страницCompetencias Topografia y CaminosCarlos E. Tairo AlarconОценок пока нет
- Estudios Técnicos para Proyectos de Agua Potable, Alcantarillado y Saneamiento Topografía y Mecánica de SuelosДокумент186 страницEstudios Técnicos para Proyectos de Agua Potable, Alcantarillado y Saneamiento Topografía y Mecánica de SuelosAlejandro NajeraОценок пока нет
- Topografia de Equipos ModernosДокумент72 страницыTopografia de Equipos ModernosJaime Edwin Sardon100% (10)
- Estudio Topografico Final ReservorioДокумент12 страницEstudio Topografico Final ReservorioFredy Chahua AlhuayОценок пока нет
- Concurso Busqueda Del Tesoro PDFДокумент9 страницConcurso Busqueda Del Tesoro PDFJose HelmanОценок пока нет
- Manual Topografia PDFДокумент122 страницыManual Topografia PDFRamiroОценок пока нет
- Procesos para Un Levantamiento TopograficoДокумент29 страницProcesos para Un Levantamiento TopograficoIsaac Visual100% (1)
- TaquimetríaДокумент4 страницыTaquimetríaashley0% (1)
- Medición de DistanciasДокумент6 страницMedición de DistanciassharenОценок пока нет
- IMPORTANCIA DE LA TOPOGRAFIA A TRAVES DE LA HISTORIA Taller 1Документ5 страницIMPORTANCIA DE LA TOPOGRAFIA A TRAVES DE LA HISTORIA Taller 1maria cristina soto diazОценок пока нет
- Estabilidad de Estructuras SubterraneasДокумент59 страницEstabilidad de Estructuras SubterraneasMiguel Angel Huayaney Milla100% (1)
- Instrumental TopograficoДокумент14 страницInstrumental TopograficoNicolás Matías Castillo Morales100% (2)
- Eje de Una CarreteraДокумент30 страницEje de Una CarreteraJA AH0% (2)
- Nikon DTM-302 Instruction Manual-SpanishДокумент260 страницNikon DTM-302 Instruction Manual-SpanishFernando Sanchez ChamochinОценок пока нет
- Informe Canal RectangularДокумент24 страницыInforme Canal RectangularLuis Fernando CondoriОценок пока нет
- Estudio Topografico Puente ChinchipeДокумент38 страницEstudio Topografico Puente ChinchipeWilde Alexander Mogollon OchoaОценок пока нет
- Equipos de TopografíaДокумент5 страницEquipos de Topografíavidal_rodriguez_4Оценок пока нет
- Topografia para IngenierosДокумент59 страницTopografia para IngenierosHenry Blandon100% (1)
- Poligonal Abierta Correcion ParcialДокумент15 страницPoligonal Abierta Correcion ParcialjorgeОценок пока нет
- Examen ToposssДокумент60 страницExamen ToposssZavaleta Vivanco100% (1)
- Practica TaquimetriaДокумент22 страницыPractica TaquimetriaIngrid Catherine Soto JaimeОценок пока нет
- Aplic 2 ParteДокумент90 страницAplic 2 ParteAdrianMaytaОценок пока нет