Вам также может понравиться
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОт EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОценок пока нет
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorОт EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorОценок пока нет
- Automatic Tuning Method For The Design of Supplementary Damping Controllers For Exible Alternating Current Transmission System DevicesДокумент11 страницAutomatic Tuning Method For The Design of Supplementary Damping Controllers For Exible Alternating Current Transmission System DevicesFernando RamosОценок пока нет
- Grid-Forming Power Converters Tuned Through Artificial Intelligence To Damp Subsynchronous Interactions in Electrical GridsДокумент11 страницGrid-Forming Power Converters Tuned Through Artificial Intelligence To Damp Subsynchronous Interactions in Electrical Gridsسيد الخواتمОценок пока нет
- Journalofelectricalengineering&Technologyvol.5, No.4, Pp.552 560,2010 ÎДокумент14 страницJournalofelectricalengineering&Technologyvol.5, No.4, Pp.552 560,2010 ÎgeethachowОценок пока нет
- Design and Analysis of An Adaptive Fuzzy Power System StabilizerДокумент7 страницDesign and Analysis of An Adaptive Fuzzy Power System StabilizermiguelankeloОценок пока нет
- Multiparameter TS Approach For Loaction of Series Connected Controllers To Enhance Power System Transient StabilityДокумент8 страницMultiparameter TS Approach For Loaction of Series Connected Controllers To Enhance Power System Transient StabilityTarik AhasanОценок пока нет
- Application of Multiple-Model Adaptive ControlДокумент10 страницApplication of Multiple-Model Adaptive ControlRabbuni GangavarapuОценок пока нет
- Energies 14 05644Документ29 страницEnergies 14 05644Dallas GabrielОценок пока нет
- 1 s2.0 S0378779612000405 Main - 2Документ10 страниц1 s2.0 S0378779612000405 Main - 2BodoShowОценок пока нет
- Adaptive Control For Low-Frequency Power OscillationsДокумент6 страницAdaptive Control For Low-Frequency Power OscillationsAJER JOURNALОценок пока нет
- Brief Papers: Robust Tuning of Power System Stabilizers Using QFTДокумент9 страницBrief Papers: Robust Tuning of Power System Stabilizers Using QFTAhmed HussainОценок пока нет
- Bacterial Foraging Optimization Based Load Frequency Control of Interconnected Power Systems With Static Synchronous Series CompensatorДокумент7 страницBacterial Foraging Optimization Based Load Frequency Control of Interconnected Power Systems With Static Synchronous Series CompensatorSahitya16Оценок пока нет
- 04578743-Damping Controller DesignДокумент8 страниц04578743-Damping Controller DesignbirsuОценок пока нет
- Multimachine Power System Stabilizers Design Using PSO AlgorithmДокумент8 страницMultimachine Power System Stabilizers Design Using PSO AlgorithmFaiza FofaОценок пока нет
- Design of Wide-Area Damping Controllers For Interarea OscillationsДокумент8 страницDesign of Wide-Area Damping Controllers For Interarea OscillationsRajesh GangwarОценок пока нет
- Decentralized Robust Adaptive-Output Feedback Controller For Power System Load Frequency ControlДокумент10 страницDecentralized Robust Adaptive-Output Feedback Controller For Power System Load Frequency ControlNirav ChauhanОценок пока нет
- A Benchmark System For Digital Time-Domain Simulation of An Active Power FilterДокумент8 страницA Benchmark System For Digital Time-Domain Simulation of An Active Power FilterAndreeaОценок пока нет
- Problem StatementДокумент9 страницProblem StatementTauseef Gillani100% (1)
- PSS Phi 2017 4Документ34 страницыPSS Phi 2017 4iman MHNavehОценок пока нет
- Wang Da - Ph.D. ThesisДокумент162 страницыWang Da - Ph.D. ThesisMary MorseОценок пока нет
- Robust Power System Stabilizer Design For An Industrial Power System in Taiwan Using Linear Matrix Inequality TechniquesДокумент6 страницRobust Power System Stabilizer Design For An Industrial Power System in Taiwan Using Linear Matrix Inequality TechniquesDiego Martinez AranedaОценок пока нет
- StatcomДокумент6 страницStatcomsathyakalyanОценок пока нет
- Verdugo 2017Документ6 страницVerdugo 2017mahmoudzakiОценок пока нет
- Multi-Band Power System Stabilizer Design by Using CPCE Algorithm For Multi-Machine Power SystemДокумент13 страницMulti-Band Power System Stabilizer Design by Using CPCE Algorithm For Multi-Machine Power Systemhoussem_ben_aribia6240Оценок пока нет
- Improvement of Power System Transient Stability Using An Intelligent Control MethodДокумент9 страницImprovement of Power System Transient Stability Using An Intelligent Control MethodKhubaib AhmedОценок пока нет
- Neural Network Control of Grid-Connected Fuel Cell Plants For Enhancement of Power QualityДокумент7 страницNeural Network Control of Grid-Connected Fuel Cell Plants For Enhancement of Power Qualityashikhmd4467Оценок пока нет
- Electrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandДокумент8 страницElectrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandNabin AdhikariОценок пока нет
- Optimal Design of Power System Stabilizer For Multi-Machine Power System Using Differential Evolution AlgorithmДокумент8 страницOptimal Design of Power System Stabilizer For Multi-Machine Power System Using Differential Evolution Algorithmashikhmd4467Оценок пока нет
- A Network Reduction Method With Synchronized Phasor MeasurementsДокумент6 страницA Network Reduction Method With Synchronized Phasor MeasurementsicovinyОценок пока нет
- Load-Frequency Control in A Two-Area Power System Using The Fuzzy PID MethodДокумент23 страницыLoad-Frequency Control in A Two-Area Power System Using The Fuzzy PID MethodpetruskaraОценок пока нет
- A Method For Power Conditioning With Harmonic Reduction in MicrogridsДокумент6 страницA Method For Power Conditioning With Harmonic Reduction in MicrogridsINder DǝǝpОценок пока нет
- Index: Battery Ultra-Capacitor IC Engine Electric Motor Fuel CellДокумент8 страницIndex: Battery Ultra-Capacitor IC Engine Electric Motor Fuel CelldavpaffОценок пока нет
- Dynamic Model For Power Systems With Multiple FACTS ControllersДокумент11 страницDynamic Model For Power Systems With Multiple FACTS ControllersSyed Wajahat AliОценок пока нет
- State Space Model of Grid Connected Inverters Under Current Control ModeДокумент10 страницState Space Model of Grid Connected Inverters Under Current Control Modeoussama sadkiОценок пока нет
- Simultaneous Coordinated Design of PSS and TCSC Damping Controller For Power SystemsДокумент8 страницSimultaneous Coordinated Design of PSS and TCSC Damping Controller For Power SystemssunitharajababuОценок пока нет
- Optimal Selection of Pmu Locations For Enhanced State Estimation in Smart GridДокумент4 страницыOptimal Selection of Pmu Locations For Enhanced State Estimation in Smart GridRajesh GangwarОценок пока нет
- Modeling Wind Farms For Power System LoadДокумент8 страницModeling Wind Farms For Power System LoadArmando MaloneОценок пока нет
- Transient Stability of Power Systems With Embedded VSC HVDC Links Stability Margins Analysis and Control Juan Carlos GONZALEZДокумент12 страницTransient Stability of Power Systems With Embedded VSC HVDC Links Stability Margins Analysis and Control Juan Carlos GONZALEZChristian MárquezОценок пока нет
- Disturbance Observer Based Fractional-Order Integral Sliding Mode Frequency Control Strategy For Interconnected Power SystemДокумент11 страницDisturbance Observer Based Fractional-Order Integral Sliding Mode Frequency Control Strategy For Interconnected Power Systemjitenderkumar_goyal28Оценок пока нет
- A Neural-Network-Based Model Predictive Control of Three-Phase Inverter With An Output LC FilterДокумент13 страницA Neural-Network-Based Model Predictive Control of Three-Phase Inverter With An Output LC FilterDick CarlОценок пока нет
- Generic 12-Bus Test System For Wind Power Integration StudiesДокумент6 страницGeneric 12-Bus Test System For Wind Power Integration StudiesJONATHAN RAFAEL MEZA CARRILLOОценок пока нет
- A Particle-Swarm-Based Approach of Power System Stability Enhancement With Unified Power Ow ControllerДокумент9 страницA Particle-Swarm-Based Approach of Power System Stability Enhancement With Unified Power Ow ControllerMmillion AlemayehuОценок пока нет
- Power System Stabilizers Design For Multimachine Power Systems Using Local MeasurementsДокумент9 страницPower System Stabilizers Design For Multimachine Power Systems Using Local Measurementsp97480Оценок пока нет
- Calculating Optimal System ParametersДокумент27 страницCalculating Optimal System Parametersjaach78Оценок пока нет
- Energies 10 00907Документ25 страницEnergies 10 00907imrankhan1995Оценок пока нет
- A Neural Network Based Optimal Wide Area Control Scheme For A Power SystemДокумент7 страницA Neural Network Based Optimal Wide Area Control Scheme For A Power Systemapi-3697505Оценок пока нет
- Electric Power Systems Research: Distribution Power Ow Method Based On A Real Quasi-Symmetric MatrixДокумент12 страницElectric Power Systems Research: Distribution Power Ow Method Based On A Real Quasi-Symmetric MatrixSatishKumarInjetiОценок пока нет
- Power System StabilizerДокумент10 страницPower System StabilizerAsif Ali ShaikОценок пока нет
- Improved System OperationДокумент6 страницImproved System OperationRafi MuhammedОценок пока нет
- IOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringДокумент11 страницIOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalОценок пока нет
- Developing Chemical Reaction Differential Evolution Method For Optimization of Pss ParametersДокумент8 страницDeveloping Chemical Reaction Differential Evolution Method For Optimization of Pss ParametersmouradОценок пока нет
- Electric Power Systems Research: Salvatore D'Arco, Jon Are Suul, Olav B. FossoДокумент18 страницElectric Power Systems Research: Salvatore D'Arco, Jon Are Suul, Olav B. Fossosureh32Оценок пока нет
- Valve Controller Design of Multi-Machine Power Systems Based On Adaptive Hamilton Minimax MethodДокумент8 страницValve Controller Design of Multi-Machine Power Systems Based On Adaptive Hamilton Minimax MethodsivaОценок пока нет
- Fuzzy Logic For Single AreaДокумент11 страницFuzzy Logic For Single Areaabata yohannesОценок пока нет
- Frequency and Voltage Stabilit-IRO-Journals-4 4 4Документ20 страницFrequency and Voltage Stabilit-IRO-Journals-4 4 4aliebadizahedan.375Оценок пока нет
- Literature Review On Relay Coordination Using Software TechniquesДокумент4 страницыLiterature Review On Relay Coordination Using Software TechniquesMohitОценок пока нет
- Elsevier 2016 PDFДокумент12 страницElsevier 2016 PDFVenkat Reddy KotaОценок пока нет
- Synopsis On Power Sysytem Fault AnalysisДокумент12 страницSynopsis On Power Sysytem Fault AnalysisAmulya PathakОценок пока нет
- Load-Frequency Regulation Under0-06Документ9 страницLoad-Frequency Regulation Under0-06kodandaram100% (1)
- Solenoid Actuator Design and Modeling With Application in Engine Vibration IsolatorsДокумент9 страницSolenoid Actuator Design and Modeling With Application in Engine Vibration IsolatorsnevesunipampaОценок пока нет
- Lecture 3 Modelling of Dynamic SystemsДокумент19 страницLecture 3 Modelling of Dynamic Systemskobamelo LetowaОценок пока нет
- A Detailed Study of NHPP Software Reliability Models: (Invited Paper)Документ11 страницA Detailed Study of NHPP Software Reliability Models: (Invited Paper)Akshay YadavОценок пока нет
- Chapter 2 Proses Riset PemasaranДокумент24 страницыChapter 2 Proses Riset PemasaranKrisna WiraОценок пока нет
- Time Response - Study Material Lecturing Notes Assignment Reference Wiki Description Explanation Brief DetailДокумент3 страницыTime Response - Study Material Lecturing Notes Assignment Reference Wiki Description Explanation Brief DetailGilbert SigalaОценок пока нет
- LR Queuing Theory in HealthcareДокумент15 страницLR Queuing Theory in HealthcareAdrianaОценок пока нет
- Cel 2106 SCL Worksheet Week 1Документ9 страницCel 2106 SCL Worksheet Week 1Abdul Qhouyyum AiedilОценок пока нет
- A Survey On Control Techniques To Stabilize and Control The Non Linear SystemДокумент4 страницыA Survey On Control Techniques To Stabilize and Control The Non Linear SystemshubaОценок пока нет
- The Calculation of Recycling Rates For End-Of-Life Products - Theory and PracticeДокумент22 страницыThe Calculation of Recycling Rates For End-Of-Life Products - Theory and Practiceani putkaradzeОценок пока нет
- Optimization of Blasting Parameters in Opencast Mines 06Документ79 страницOptimization of Blasting Parameters in Opencast Mines 06Cesar Agustinus NugrahaОценок пока нет
- CATTBДокумент221 страницаCATTBdragonstriker100% (1)
- 2023 Programme Specification MSC Artificial Intelligence and Robotics v1 32526Документ57 страниц2023 Programme Specification MSC Artificial Intelligence and Robotics v1 32526Tahir SamadОценок пока нет
- Thesis FulltextДокумент342 страницыThesis Fulltextlirba100% (1)
- Unit.1 Operations Research Notes (By Dr. Ksrinivas)Документ21 страницаUnit.1 Operations Research Notes (By Dr. Ksrinivas)MURALI KRISHNAОценок пока нет
- System Dynamics Modeling With R Lecture Notes in Social Networks by Jim DugganДокумент188 страницSystem Dynamics Modeling With R Lecture Notes in Social Networks by Jim DugganMarcAparici100% (3)
- Formulating A Mathematical Model PDFДокумент3 страницыFormulating A Mathematical Model PDFBruno SaturnОценок пока нет
- Determining Optimum Number of Kanbans For Workstations in A Kanban-Based Manufacturing Line Using Discrete-Event Simulation: A Case StudyДокумент9 страницDetermining Optimum Number of Kanbans For Workstations in A Kanban-Based Manufacturing Line Using Discrete-Event Simulation: A Case StudyKhalid IdrissiОценок пока нет
- A Survey of Maneuvering Target Tracking Dynamic ModelsДокумент24 страницыA Survey of Maneuvering Target Tracking Dynamic ModelsciaobubuОценок пока нет
- Vensim Tutorial PDFДокумент234 страницыVensim Tutorial PDFsumit SinghОценок пока нет
- OpenSAP Ds1 Week 1 TranscriptДокумент17 страницOpenSAP Ds1 Week 1 Transcriptqwerty_qwerty_2009Оценок пока нет
- Vortex Processes and Solid Body DynamicsДокумент310 страницVortex Processes and Solid Body DynamicsGlasst Innovacion 2019Оценок пока нет
- HSRA14 - Petition Coram Nobis - With ExhibitsДокумент55 страницHSRA14 - Petition Coram Nobis - With ExhibitsStuart M. FlashmanОценок пока нет
- Mwalyosi ImpactIdentificationPrediction 1999Документ96 страницMwalyosi ImpactIdentificationPrediction 1999AJAY KRISHNAОценок пока нет
- Chaos in Real Data: Population and Community BiologyДокумент238 страницChaos in Real Data: Population and Community BiologyPaulo ShikoyОценок пока нет
- AIChE Journal - 2022 - Sharma - A Hybrid Science Guided Machine Learning Approach For Modeling Chemical Processes A Review PDFДокумент19 страницAIChE Journal - 2022 - Sharma - A Hybrid Science Guided Machine Learning Approach For Modeling Chemical Processes A Review PDFAhmad SyauqiОценок пока нет
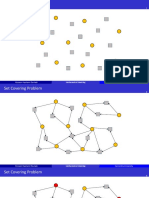
- INDU 6121 (6 - Set Covering Problem)Документ21 страницаINDU 6121 (6 - Set Covering Problem)김영휘Оценок пока нет
- Quantitative Techniques - 317 14Документ294 страницыQuantitative Techniques - 317 14SEBI P RAJA BABUОценок пока нет
- Plant Performance CalculationsДокумент2 страницыPlant Performance CalculationsKalki Communication Technologies Ltd100% (1)
- Or441-Lec04-What Is Discrete Event Simulation - Sep 2017Документ20 страницOr441-Lec04-What Is Discrete Event Simulation - Sep 2017EstebanОценок пока нет
- p7 MariaДокумент7 страницp7 MariaWaqas AhmadОценок пока нет