Вам также может понравиться
- COWIN E7 PRO Instruction PDFДокумент1 страницаCOWIN E7 PRO Instruction PDFabhishek046Оценок пока нет
- XMU Firmware Release Notes 1.2.3.3Документ3 страницыXMU Firmware Release Notes 1.2.3.3abhishek046Оценок пока нет
- Ipr MCQДокумент50 страницIpr MCQabhishek04685% (120)
- 910S 4Документ41 страница910S 4bvkaleswaraoОценок пока нет
- JHGJHJHДокумент1 страницаJHGJHJHabhishek046Оценок пока нет
- Analysis of CameraДокумент2 страницыAnalysis of Cameraabhishek046Оценок пока нет
- For The Rest of Us: Kush AmerasingheДокумент26 страницFor The Rest of Us: Kush Amerasinghejuliejeon31550Оценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Cluster IssuesДокумент10 страницCluster IssuesthiruvenkadambeОценок пока нет
- COMP1521 22T1 - Week 01 Laboratory Sample SolutionsДокумент16 страницCOMP1521 22T1 - Week 01 Laboratory Sample SolutionsRudra ArjunОценок пока нет
- FSM TestingДокумент52 страницыFSM TestingLam PhuongОценок пока нет
- Our New Catalogue Now Includes All of The Latest EFENДокумент15 страницOur New Catalogue Now Includes All of The Latest EFENRaju ChowdhuryОценок пока нет
- 2007 Ford EscapeДокумент205 страниц2007 Ford EscapeEDUARDO ALMARALES MARTINEZ100% (2)
- DG Application AMF / Synchroniser: Conzerv Systems PVT LTDДокумент4 страницыDG Application AMF / Synchroniser: Conzerv Systems PVT LTDjaikolangaraparambilОценок пока нет
- Inter System Cell Reselection Optimization UmtsДокумент5 страницInter System Cell Reselection Optimization UmtsNoor SyaifulОценок пока нет
- DELPHI - CARS Compatibles PDFДокумент2 169 страницDELPHI - CARS Compatibles PDFjuanОценок пока нет
- OPA335Документ32 страницыOPA335Mafer Ruiz EstudilloОценок пока нет
- Project SynopsisДокумент7 страницProject SynopsisSajina AlthafОценок пока нет
- Manual Del Operador altec-AM50-55-50E-55E-O PDFДокумент110 страницManual Del Operador altec-AM50-55-50E-55E-O PDFFabian Andres Cely67% (3)
- Generator TrainingДокумент3 страницыGenerator TrainingolumideОценок пока нет
- Series 0+-MODEL D: Connection ManualДокумент124 страницыSeries 0+-MODEL D: Connection ManualCristobal PerezОценок пока нет
- Ternium Sustainabilityreport2017 OnlineДокумент48 страницTernium Sustainabilityreport2017 OnlineBederОценок пока нет
- Spoof MAC ADDRESSДокумент6 страницSpoof MAC ADDRESSJose Luis Gutierrez100% (1)
- CuAg0,1P PDFДокумент8 страницCuAg0,1P PDFirajfarji2481Оценок пока нет
- AMBV Ball Valve 150-600#Документ18 страницAMBV Ball Valve 150-600#Heri SetyantoОценок пока нет
- Instructions 95-8465-03: Unitized Ultraviolet Flame Detector/Controller U7602EДокумент20 страницInstructions 95-8465-03: Unitized Ultraviolet Flame Detector/Controller U7602ESamir FertasОценок пока нет
- FLM 420 RLV1Документ4 страницыFLM 420 RLV1Muhammad Ali ShahОценок пока нет
- IPA 48S User Manual V1.1Документ50 страницIPA 48S User Manual V1.1ivoroОценок пока нет
- Code Quality Etc. IDI OutlineДокумент71 страницаCode Quality Etc. IDI OutlineVai NanОценок пока нет
- Angular Interview QuestionsДокумент9 страницAngular Interview QuestionsRekha Perumal VijayanОценок пока нет
- Regular Compliance Audit - FormsДокумент6 страницRegular Compliance Audit - FormsSaji JimenoОценок пока нет
- Artikel Audit 3Документ20 страницArtikel Audit 3Almi HafizОценок пока нет
- AssignmentДокумент7 страницAssignmentKamran AhmedОценок пока нет
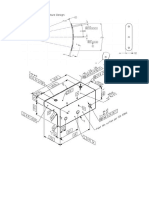
- Functional Gage and Fixture DesignДокумент8 страницFunctional Gage and Fixture DesignAnonymous 7ZTcBn0% (1)
- Wireless Solution For STC 4G3 Footprint: Huawei Technologies Co., LTDДокумент26 страницWireless Solution For STC 4G3 Footprint: Huawei Technologies Co., LTDShahzad AhmedОценок пока нет
- SAE PaperДокумент16 страницSAE PaperMani FasihozamanОценок пока нет
- d7 MST Mp71 2ppletter r1 PressДокумент2 страницыd7 MST Mp71 2ppletter r1 PressedgarОценок пока нет
- MS28774 Retainer, Packing Backup, Single Turn, PolytetrafluoroethyleneДокумент6 страницMS28774 Retainer, Packing Backup, Single Turn, Polytetrafluoroethylenemikeg927Оценок пока нет