Вам также может понравиться
- Sintesis de MecanismosДокумент29 страницSintesis de MecanismosFelipe Andrés Cuevas EchegoyenОценок пока нет
- Aislamiento GalvanicoДокумент1 страницаAislamiento GalvanicoAnton AncaОценок пока нет
- Sintesis y Dinamica de MecanismosДокумент3 страницыSintesis y Dinamica de MecanismosMechAttackОценок пока нет
- DiseñoДокумент3 страницыDiseñofes cuautiОценок пока нет
- Rosca CuadradaДокумент20 страницRosca CuadradaJuan AlmeidaОценок пока нет
- Fuerza Aplicada Externamente Sobre Una Union AtornilladaДокумент4 страницыFuerza Aplicada Externamente Sobre Una Union AtornilladaVictor OyolaОценок пока нет
- Análisis y Síntesis de Mecanismos Con Aplicaciones - (PG 97 - 102)Документ6 страницAnálisis y Síntesis de Mecanismos Con Aplicaciones - (PG 97 - 102)Jesus D. Pardo Ricalday0% (1)
- Ensayo de Motores ElectricosДокумент22 страницыEnsayo de Motores ElectricosirvinelectromecanicoОценок пока нет
- CMGДокумент5 страницCMGManuela Antury MОценок пока нет
- Practica Tornillo PotenciaДокумент4 страницыPractica Tornillo PotenciaRobercito Sauca100% (1)
- Dispositivos de Disparo para Semiconductores ControladosДокумент7 страницDispositivos de Disparo para Semiconductores ControladosFernando GuerreroОценок пока нет
- Ejemplo de Diseno de Un EjeДокумент16 страницEjemplo de Diseno de Un EjeFernando VillegasОценок пока нет
- Analisis Estocastico 2Документ17 страницAnalisis Estocastico 2Luis Alberto Navarro JimenezОценок пока нет
- Sujetadores Roscados y Uniones Rigidez Del SujetadorДокумент6 страницSujetadores Roscados y Uniones Rigidez Del SujetadorEdisson AriasОценок пока нет
- Fajas de Potencia Ado San Luis GonzagaДокумент40 страницFajas de Potencia Ado San Luis GonzagaRenjo Renjo NAОценок пока нет
- Práctica #2 (Maq. Elec. 3)Документ5 страницPráctica #2 (Maq. Elec. 3)Alexis VazquezОценок пока нет
- Investigacion12 Mapa Mental Ulises PDFДокумент2 страницыInvestigacion12 Mapa Mental Ulises PDFIrma SotoОценок пока нет
- Prac Frenos Zap Corta 2018 01Документ2 страницыPrac Frenos Zap Corta 2018 01Mijhael FernandezОценок пока нет
- Guía 5 Roblones o RemachesДокумент2 страницыGuía 5 Roblones o Remachesmatias hermosilla100% (1)
- CircuitosДокумент5 страницCircuitosIsmael MedinaОценок пока нет
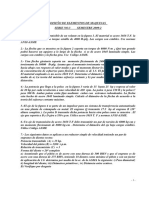
- Examen de Maquinas ElectromecanicaДокумент9 страницExamen de Maquinas ElectromecanicaAony H.Q.Оценок пока нет
- Polaridad de Un TransformadorДокумент4 страницыPolaridad de Un TransformadorAhkishaОценок пока нет
- Retícula Ingenieria Mecánica (Instituto Tecnológico de Nuevo Laredo)Документ2 страницыRetícula Ingenieria Mecánica (Instituto Tecnológico de Nuevo Laredo)Guillermo ReyesОценок пока нет
- Leyes de Semejanza de Las TurbomáquinasДокумент7 страницLeyes de Semejanza de Las TurbomáquinasMam RolanОценок пока нет
- EngranesДокумент64 страницыEngranesjose fernando chavez villanuevaОценок пока нет
- 2 ParcialДокумент4 страницы2 ParcialDAvudОценок пока нет
- Fundamentes Del Elect. Formativa 2 Principios de Conservacion de Energia Electromecanica Hermes ChavezДокумент13 страницFundamentes Del Elect. Formativa 2 Principios de Conservacion de Energia Electromecanica Hermes ChavezGlenda Ureña de ChavezОценок пока нет
- Flujo Alrededor de Un Cilindro Sin CirculaciónДокумент21 страницаFlujo Alrededor de Un Cilindro Sin CirculaciónEnzo Benites Julca100% (1)
- Practica 9 MedicionesДокумент11 страницPractica 9 MedicionesChristian Eduardo Morales SilvaОценок пока нет
- 5.2 Transmisiones Por BandasДокумент20 страниц5.2 Transmisiones Por BandasDiego Alejandro0% (1)
- Ejemplo CónicoДокумент4 страницыEjemplo CónicoJosé AlvaroОценок пока нет
- Tarea 1-2 TorsiónДокумент5 страницTarea 1-2 TorsiónAdrián RodríguezОценок пока нет
- ACTIVIDAD 3 Uniones RemachadasДокумент16 страницACTIVIDAD 3 Uniones Remachadasalexis100% (1)
- Ayudantía 3 DSLДокумент18 страницAyudantía 3 DSLJavo BarrelОценок пока нет
- Arrancadores Automaticos de CC PDFДокумент12 страницArrancadores Automaticos de CC PDFAarón MarxellyОценок пока нет
- Normas y Código Del Diseño MecánicoДокумент3 страницыNormas y Código Del Diseño MecánicoMarco MolinaОценок пока нет
- Diseño y Construcción de Una Máquina para Ensayos de Fatiga de Muestras Planas Por Flexión AlternativaДокумент119 страницDiseño y Construcción de Una Máquina para Ensayos de Fatiga de Muestras Planas Por Flexión AlternativaLuis Enrique FernandezОценок пока нет
- Actividad U3Документ18 страницActividad U3JUAN MIGUEL FLORES SANTIAGOОценок пока нет
- Problemas ResueltosДокумент21 страницаProblemas ResueltosNoe Minga CalderonОценок пока нет
- Prob de Circuitos Magnéticos 5º NotaДокумент4 страницыProb de Circuitos Magnéticos 5º NotaMauro Saucedo TellezОценок пока нет
- Fuerzas Ejercidas Por Un Engranaje A Un Eje PDFДокумент9 страницFuerzas Ejercidas Por Un Engranaje A Un Eje PDFAna Karina CupeiroОценок пока нет
- Barra de Sección CónicaДокумент20 страницBarra de Sección CónicaBoris PumisachoОценок пока нет
- Diseño de EjesДокумент20 страницDiseño de EjesEduardo ReyesОценок пока нет
- Arranque en Estrella TrianguloДокумент11 страницArranque en Estrella TrianguloDiego Fernandez100% (1)
- 2.12 Cálculo de Inductancia para Conductores AgrupadosДокумент14 страниц2.12 Cálculo de Inductancia para Conductores AgrupadosrafaelОценок пока нет
- Procesos - Manufactura - Clases 3Документ74 страницыProcesos - Manufactura - Clases 3AlexDarioTenelemaОценок пока нет
- Unidad 2Документ28 страницUnidad 2Fernando OcampoОценок пока нет
- Trabajo de AndiaДокумент17 страницTrabajo de AndiaSergioAugustoBaldeonОценок пока нет
- Informe 1 Laboratorio Maquinas 2Документ4 страницыInforme 1 Laboratorio Maquinas 2Diego GelvezОценок пока нет
- Introduccià N A Los Mecanismos y A La Cinemã¡ticaДокумент30 страницIntroduccià N A Los Mecanismos y A La Cinemã¡ticaKaren Granados100% (1)
- Metodo de Volumen FinitoДокумент7 страницMetodo de Volumen FinitoLuis Alberto Lopez EstevaОценок пока нет
- Tabulación de Centros InstantaneosДокумент50 страницTabulación de Centros InstantaneosmijachuОценок пока нет
- Calculo de Velocidades de Piston y CaudalДокумент47 страницCalculo de Velocidades de Piston y CaudalWalter Sarango0% (1)
- Diseño de Maquinas TrabajoДокумент7 страницDiseño de Maquinas Trabajofredy apazaОценок пока нет
- Analisis y Sintesis de MecanismosДокумент14 страницAnalisis y Sintesis de MecanismosLeonardo RomoОценок пока нет
- Sintesis de MecanismosДокумент63 страницыSintesis de Mecanismosklopez472Оценок пока нет
- Preguntas y Respuestas (Rebatibles) Sobre Metodologías de DesarrolloДокумент6 страницPreguntas y Respuestas (Rebatibles) Sobre Metodologías de DesarrolloRafael100% (4)
- El Método de Ingeniería y El Pensamiento EstadísticoДокумент15 страницEl Método de Ingeniería y El Pensamiento EstadísticoSbeydi Limeta100% (1)
- Trabajo Grupal Linea RectaДокумент11 страницTrabajo Grupal Linea RectaStephannyОценок пока нет
- Análisis y diseño de algoritmos: Un enfoque prácticoОт EverandAnálisis y diseño de algoritmos: Un enfoque prácticoОценок пока нет
- Biografia de Los Hermanos GrimmДокумент3 страницыBiografia de Los Hermanos GrimmJeni ElizondoОценок пока нет
- Articulo Resumen Como Fomentar Los Valores A Mi Familia en Tiempos de CrisisДокумент3 страницыArticulo Resumen Como Fomentar Los Valores A Mi Familia en Tiempos de CrisisNiels RudolphОценок пока нет
- Saberes PorofesionalesДокумент2 страницыSaberes PorofesionalesGilberto Villanueva HernandezОценок пока нет
- Análisis GrafológicoДокумент6 страницAnálisis GrafológicoViolet MartinezОценок пока нет
- Taller MARIA CAMILA GIRALDO GIRALDO, MILENA GÓMEZ MAZO, SARA RODRÍGUEZ LONDOÑO, 01092019Документ18 страницTaller MARIA CAMILA GIRALDO GIRALDO, MILENA GÓMEZ MAZO, SARA RODRÍGUEZ LONDOÑO, 01092019Maria Camila GiraldoОценок пока нет
- RF - Historia de México IДокумент50 страницRF - Historia de México Isonia mendezОценок пока нет
- Nieto Soria, JM - La Monarquía Como Conflicto (Cap. 2-3) 2Документ124 страницыNieto Soria, JM - La Monarquía Como Conflicto (Cap. 2-3) 2Anonymous CNXJfKA7aОценок пока нет
- Delimitacion Del TemaДокумент12 страницDelimitacion Del TemaCynthia RodrìguezОценок пока нет
- El Conocimiento Científico Y El Proceso de InvestigaciónДокумент15 страницEl Conocimiento Científico Y El Proceso de InvestigaciónAda maria Echenique MataОценок пока нет
- Accion de Tutela Riccardo Hernández - Concejo Municipal ChinácotaДокумент7 страницAccion de Tutela Riccardo Hernández - Concejo Municipal ChinácotaJosé Ricardo Hernández GómezОценок пока нет
- 3el Coaching Como Estrategia para La Formación de Competencias ProfesionalesДокумент12 страниц3el Coaching Como Estrategia para La Formación de Competencias ProfesionalesMajoОценок пока нет
- Hoja de Trabajo No 4 v2Документ4 страницыHoja de Trabajo No 4 v2Javier Alfredo Pagalo GuamanОценок пока нет
- Informe HOYДокумент8 страницInforme HOYPaul Rogger Cano RamirezОценок пока нет
- Molinari 2003Документ6 страницMolinari 2003Santiago Cardenas100% (1)
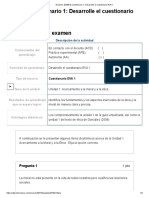
- Examen - (AAB01) Cuestionario 1 - Desarrolle El Cuestionario EVA 1Документ4 страницыExamen - (AAB01) Cuestionario 1 - Desarrolle El Cuestionario EVA 1CRISTHOPER JOSUE AGUIRRE YELAОценок пока нет
- Videos Cepre San MarcosДокумент3 страницыVideos Cepre San MarcosJuliana Chumpitaz TerronesОценок пока нет
- Raúl Gonzálo Cuero RengifoДокумент13 страницRaúl Gonzálo Cuero RengifoAlexandra Almeyda LoboОценок пока нет
- Ponencia. MedellinДокумент105 страницPonencia. MedellinJuan Domingo Farnós MiróОценок пока нет
- Solucionario A Examen de EntradaДокумент3 страницыSolucionario A Examen de EntradaRuber Torres SeclenОценок пока нет
- Presentacion Clase Scott PeckДокумент51 страницаPresentacion Clase Scott PeckGiovanni Mosquera GuerreroОценок пока нет
- Trabajo MedeaДокумент6 страницTrabajo Medeaenvion167% (3)
- Sistemas SocioeconomicosДокумент2 страницыSistemas SocioeconomicosPoncho Baez CordovaОценок пока нет
- Septimo Informe - Poligonal CerradaДокумент21 страницаSeptimo Informe - Poligonal CerradaLucía Del Pilar Huachua AbregúОценок пока нет
- Antecedentes Históricos y OtrosДокумент23 страницыAntecedentes Históricos y Otrosericson.delgadoОценок пока нет
- Paradigm AДокумент3 страницыParadigm AJIMIL miranda andresОценок пока нет
- Cuaderno Habilidades para La VidaДокумент33 страницыCuaderno Habilidades para La Vidamaria ángeles petit100% (1)
- Fce1 Ficha1Документ3 страницыFce1 Ficha1ISRAEL RAMOS JUAREZОценок пока нет
- Monografía Ponderación Enfoque TeóricoДокумент11 страницMonografía Ponderación Enfoque TeóricoJonás SeguraОценок пока нет
- Fisica Modulo 3Документ12 страницFisica Modulo 3David MartinezОценок пока нет
- Administración de RestriccionesДокумент12 страницAdministración de RestriccionesRobert AguilarОценок пока нет