Вам также может понравиться
- Práctica 11 MatlabДокумент5 страницPráctica 11 MatlabPedro RiveraОценок пока нет
- Práctica 10 MatlabДокумент8 страницPráctica 10 MatlabPedro RiveraОценок пока нет
- Práctica 9Документ5 страницPráctica 9Pedro Rivera0% (1)
- Práctica 9 MatlabДокумент4 страницыPráctica 9 MatlabPedro RiveraОценок пока нет
- Práctica 5Документ5 страницPráctica 5Pedro RiveraОценок пока нет
- Leyes de Los ExponentesДокумент23 страницыLeyes de Los ExponentesAbbie ReyesОценок пока нет
- Folleto Ec. Dif. Roberto Cabrera PDFДокумент157 страницFolleto Ec. Dif. Roberto Cabrera PDFMcGrey Hill100% (1)
- Sustentacion Trabajo Colaborativo Escenario 7 Segundo Bloque Ciencias Basicas Calculo I Grupo 6Документ5 страницSustentacion Trabajo Colaborativo Escenario 7 Segundo Bloque Ciencias Basicas Calculo I Grupo 6Oscar DelgadoОценок пока нет
- Taller Psu Matematica 1Документ32 страницыTaller Psu Matematica 1Adela Morales DrouillasОценок пока нет
- PACI PAI v5.9 (TDAH)Документ18 страницPACI PAI v5.9 (TDAH)rodrigo.munoz.zivkovic5568Оценок пока нет
- Practica de Ecuaciones Cpu 2023-2Документ2 страницыPractica de Ecuaciones Cpu 2023-2Maycol Janns Quispe ValdezОценок пока нет
- Ejemplo Densidad Lineal y Planar Hex (N.G)Документ4 страницыEjemplo Densidad Lineal y Planar Hex (N.G)Edgar MorenoОценок пока нет
- Física Ii (Ma462) Semana 04 - Sesión 1: Respuesta: 3,15×10 JДокумент6 страницFísica Ii (Ma462) Semana 04 - Sesión 1: Respuesta: 3,15×10 JCarlos Martín Medina TáberОценок пока нет
- Experiencia de Aprendizaje N º 08Документ13 страницExperiencia de Aprendizaje N º 08rosario vivesОценок пока нет
- UntitledДокумент23 страницыUntitledAllison Candia QuispeОценок пока нет
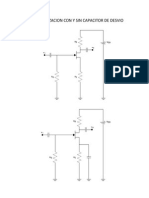
- Autopolarizacion Con y Sin Capacitor de DesvioДокумент13 страницAutopolarizacion Con y Sin Capacitor de DesvioLuis AcevedoОценок пока нет
- Practica1 207Документ7 страницPractica1 207Armando CabreraОценок пока нет
- Analisis DimencionalДокумент6 страницAnalisis DimencionalwilifredoОценок пока нет
- SIMETRIA (Complemento de Audiovisual)Документ51 страницаSIMETRIA (Complemento de Audiovisual)SeleneОценок пока нет
- Guia # 5 Ley Del CosenoДокумент6 страницGuia # 5 Ley Del CosenoBrayan suarezОценок пока нет
- Estrategia de PivoteoДокумент15 страницEstrategia de PivoteoMartin Vertiz100% (1)
- CorregidoДокумент4 страницыCorregidoANTONIO Trinidad100% (1)
- EstadOFE - POD - WebДокумент5 страницEstadOFE - POD - WebMaroua SlimaniОценок пока нет
- Viabilidad Del Curriculo (LGO2008)Документ17 страницViabilidad Del Curriculo (LGO2008)Marcela Poblete PérezОценок пока нет
- Español I PDFДокумент272 страницыEspañol I PDFSergio Noé Sánchez GutiérrezОценок пока нет
- Ejercicio Alinemientos Horizontal y VerticalДокумент7 страницEjercicio Alinemientos Horizontal y VerticalJunior ZambranoОценок пока нет
- Solucion Guia N°3 FinalizadaДокумент24 страницыSolucion Guia N°3 FinalizadaSANDRA KARINAОценок пока нет
- Dinamica Movimiento CoroscopioДокумент12 страницDinamica Movimiento CoroscopioDERLY JESUS FERNANDEZ SERNAОценок пока нет
- Centro de Masa Con Integrales TriplesДокумент3 страницыCentro de Masa Con Integrales Triplesanais zambranoОценок пока нет
- Algebra Lineal Quiz 1 Semana 3 PDFДокумент6 страницAlgebra Lineal Quiz 1 Semana 3 PDFgiovannibecerraОценок пока нет
- Numeros Complejos y FasoresДокумент8 страницNumeros Complejos y FasoresPedro Zepeda PozoОценок пока нет
- Matematica Garelik Unrn LecturaДокумент346 страницMatematica Garelik Unrn LecturaRocío Garduño DíazОценок пока нет
- Entega FinalДокумент13 страницEntega FinalMartin nuñezОценок пока нет
- Aplicaciones de La DerivadaДокумент18 страницAplicaciones de La DerivadaLarissa Aburto NahìnОценок пока нет
- Perímetro y Área Del CuadradoДокумент17 страницPerímetro y Área Del CuadradoAhkem OLОценок пока нет