Вам также может понравиться
- PSIM MANUAL For StudentsДокумент23 страницыPSIM MANUAL For StudentsSomnath Khamaru75% (4)
- Topic 3 LynchДокумент26 страницTopic 3 Lynchsunil251Оценок пока нет
- P3 Merged PEДокумент122 страницыP3 Merged PEvikkasОценок пока нет
- A Single Phase Power Factor Correction ConverterДокумент30 страницA Single Phase Power Factor Correction ConverterAnanth NoorithayaОценок пока нет
- Sim Exp NowДокумент16 страницSim Exp NowDeepak DasОценок пока нет
- Power Electronics FinalДокумент470 страницPower Electronics FinalAyushmaanОценок пока нет
- Zero Voltage Switching Active Clamp Buck-BoostДокумент10 страницZero Voltage Switching Active Clamp Buck-Boostranjitheee1292Оценок пока нет
- Buck ConverterДокумент46 страницBuck ConverterSurya PrakashОценок пока нет
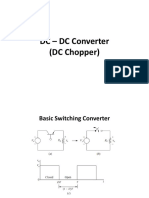
- Lecture - 6 - DC To DC (Choppers) - W2017 PDFДокумент47 страницLecture - 6 - DC To DC (Choppers) - W2017 PDFAhmad AliОценок пока нет
- Principles of Steady State Converter Analysis: Anjana S Ap, EeeДокумент26 страницPrinciples of Steady State Converter Analysis: Anjana S Ap, Eeemridul mpОценок пока нет
- Buck Converter: Assignment - 4 (OE)Документ6 страницBuck Converter: Assignment - 4 (OE)Muskan Kaur CheemaОценок пока нет
- Zero Voltage Switching Resonant Power Devices by Bill AndrecakДокумент28 страницZero Voltage Switching Resonant Power Devices by Bill AndrecakRekhamtrОценок пока нет
- One Cycle ControlДокумент9 страницOne Cycle ControlNithin SebastianОценок пока нет
- ZCS-PWM Converter For Reducing Switching Losses: Subi SДокумент7 страницZCS-PWM Converter For Reducing Switching Losses: Subi SInternational Organization of Scientific Research (IOSR)Оценок пока нет
- Chapter 4Документ23 страницыChapter 4Arife AbdulkerimОценок пока нет
- DC-DC ConvertersДокумент29 страницDC-DC Convertersرغد كنعانОценок пока нет
- Slua 121Документ4 страницыSlua 121Chinedu EgbusiriОценок пока нет
- Steady-State Equivalent Circuit Modeling, Losses and Efficiency 08312021Документ37 страницSteady-State Equivalent Circuit Modeling, Losses and Efficiency 08312021f789sgacanonОценок пока нет
- VVV VV V V VДокумент2 страницыVVV VV V V Vfrizbee45Оценок пока нет
- DC-DC ConvertersДокумент26 страницDC-DC Convertersرغد كنعانОценок пока нет
- P 2Документ17 страницP 2AnushreeОценок пока нет
- Interleaved Boost Converter For Photovoltaic Power-GenerationДокумент11 страницInterleaved Boost Converter For Photovoltaic Power-GenerationRihab HamdiОценок пока нет
- Analysis and Design of The Resonant Converter For Low Output Current RippleДокумент9 страницAnalysis and Design of The Resonant Converter For Low Output Current Rippleroughdraft2020Оценок пока нет
- Chapter Four: DC-DC Conversion: DC ChoppersДокумент55 страницChapter Four: DC-DC Conversion: DC Choppersfor lifeОценок пока нет
- Lecture12 Chapter4 - Buck - CCM - AnalysisДокумент39 страницLecture12 Chapter4 - Buck - CCM - AnalysisCarlos Alberto Viancha SalazarОценок пока нет
- Conv DC-DC Paper ENglishДокумент5 страницConv DC-DC Paper ENglishpepe890305Оценок пока нет
- 55 Chapter 53Документ4 страницы55 Chapter 53ud54Оценок пока нет
- Adisu DC DCДокумент20 страницAdisu DC DCAdisuОценок пока нет
- Soft SwitchingДокумент6 страницSoft SwitchingR.k. Rahul KumarОценок пока нет
- Welcome To All The Teacher's Of: SmitДокумент30 страницWelcome To All The Teacher's Of: Smitsrvdhar100% (2)
- ZVSДокумент28 страницZVS12BACAUОценок пока нет
- ZvsДокумент29 страницZvsSandy RonaldoОценок пока нет
- Eee 513 Lecture Module IiДокумент30 страницEee 513 Lecture Module Iistephenhuncho22Оценок пока нет
- Designing A Boost-Switching Regulator With The MCP1650Документ0 страницDesigning A Boost-Switching Regulator With The MCP1650Asad MalikОценок пока нет
- Auxxilyary Switch ControlДокумент4 страницыAuxxilyary Switch ControlMilan StefanovicОценок пока нет
- Lesson 3 TaD AE DC-DC ConverterДокумент10 страницLesson 3 TaD AE DC-DC ConverterHoi HoiОценок пока нет
- Dire Dawa University: Institute of TechnologyДокумент49 страницDire Dawa University: Institute of TechnologyAsed ZakirОценок пока нет
- Power Factor CorrectionДокумент43 страницыPower Factor Correctionravirnjn88Оценок пока нет
- Buck-Boost Converter: Switched-Mode Power Supply Autotransformer Buck-Boost TransformerДокумент8 страницBuck-Boost Converter: Switched-Mode Power Supply Autotransformer Buck-Boost TransformerRm SharmaОценок пока нет
- Power ElectronicsДокумент451 страницаPower ElectronicsSteven SengОценок пока нет
- One-Quadrant Switched-Mode Power Converters: R. PetrocelliДокумент26 страницOne-Quadrant Switched-Mode Power Converters: R. PetrocelliClaudiu UdrescuОценок пока нет
- Theory of Switched Mode Power SupplyДокумент21 страницаTheory of Switched Mode Power Supplyseahate100% (1)
- Sandy 123Документ9 страницSandy 123Sandy RonaldoОценок пока нет
- Chapter 3Документ31 страницаChapter 3Geovany CarchiОценок пока нет
- Design & Analysis of Interleaved Boost Convertor For Renewable Energy SourcesДокумент18 страницDesign & Analysis of Interleaved Boost Convertor For Renewable Energy SourcesHarshitОценок пока нет
- Power Electronics 1: ENEL371S2Документ30 страницPower Electronics 1: ENEL371S2bpd21Оценок пока нет
- Three-Phase Fly-Back AC/DC Converter With Novel Resonant Snubber CircuitДокумент5 страницThree-Phase Fly-Back AC/DC Converter With Novel Resonant Snubber CircuitKarthik KumarОценок пока нет
- Answers of Power Electronics NewДокумент9 страницAnswers of Power Electronics NewSyed ZabiullahОценок пока нет
- Boost Converter: Project FileДокумент3 страницыBoost Converter: Project FilevackyvipinОценок пока нет
- Asymmetrical Full-Bridge ConverterДокумент9 страницAsymmetrical Full-Bridge ConverterAthiesh KumarОценок пока нет
- Chaos Study and Parameter-Space Analysis of TheДокумент13 страницChaos Study and Parameter-Space Analysis of TheVisu TamilОценок пока нет
- A New LCL - Resonant Push-Pull DC-DC Converter For Inverter AppДокумент4 страницыA New LCL - Resonant Push-Pull DC-DC Converter For Inverter AppoleksandrokhapkinОценок пока нет
- Chapter 3 - DC Chopper (Part A)Документ20 страницChapter 3 - DC Chopper (Part A)andersonОценок пока нет
- SEPIC ConverterДокумент16 страницSEPIC ConverterDina GaranОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsОт EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlОт EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlРейтинг: 5 из 5 звезд5/5 (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesОт EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesОценок пока нет
- 7695v2.1 (G52 76951X8) (A55 G45 - A55 G55)Документ70 страниц7695v2.1 (G52 76951X8) (A55 G45 - A55 G55)Dávid SzabóОценок пока нет
- Lab 2.1Документ2 страницыLab 2.1Manjari Srivastava100% (3)
- C 1252 PDFДокумент5 страницC 1252 PDFAgatha ShirleyОценок пока нет
- ASTM C158-02 (2012) Strength of Glass by Flexure (Determination of Modulus of Rupture)Документ9 страницASTM C158-02 (2012) Strength of Glass by Flexure (Determination of Modulus of Rupture)Cristian Perez100% (1)
- 80010360Документ2 страницы80010360mdisicОценок пока нет
- FM-200 Alpha Series SystemsДокумент6 страницFM-200 Alpha Series SystemsGurusumiОценок пока нет
- A Review Paper On Effect of Varying Welding Heat Input On Microstructure, Mech Properties and Corrosion Behaviors of Ferritic SS & Mild Steel PDFДокумент5 страницA Review Paper On Effect of Varying Welding Heat Input On Microstructure, Mech Properties and Corrosion Behaviors of Ferritic SS & Mild Steel PDFMursidil KamilОценок пока нет
- Data SheetДокумент2 страницыData SheetAsalamEilujОценок пока нет
- Forming ProcessesДокумент8 страницForming ProcessesKishor PatilОценок пока нет
- Pace Power System Presentation - 0Документ15 страницPace Power System Presentation - 0everetteОценок пока нет
- 16PPE723Документ2 страницы16PPE723DrArun KaliappanОценок пока нет
- Education Abbreviation by AffairsCloudДокумент6 страницEducation Abbreviation by AffairsCloudgsaijanardhanОценок пока нет
- Toshiba 42pw33q - S Ch. Pw33 SchematicsДокумент18 страницToshiba 42pw33q - S Ch. Pw33 SchematicstodorloncarskiОценок пока нет
- 02 Chain Surveying PDFДокумент47 страниц02 Chain Surveying PDFch_nadeemhussain50% (2)
- 2014 Summer Model Answer PaperДокумент20 страниц2014 Summer Model Answer Papercivil gpkpОценок пока нет
- CSG CMT CalculationsДокумент5 страницCSG CMT Calculationsfrancisryan4519Оценок пока нет
- T.C. Electronic M3000 User ManualДокумент78 страницT.C. Electronic M3000 User ManualStanleyОценок пока нет
- Lectures - Mass TransferДокумент36 страницLectures - Mass TransferaaaОценок пока нет
- Computer Organization: - by Rama Krishna Thelagathoti (M.Tech CSE From IIT Madras)Документ118 страницComputer Organization: - by Rama Krishna Thelagathoti (M.Tech CSE From IIT Madras)iamy2ramsОценок пока нет
- Hero Forge: 3D Printed Miniature Care and Painting GuideДокумент4 страницыHero Forge: 3D Printed Miniature Care and Painting GuideDanilo FirminoОценок пока нет
- Tensile Properties of Ground Coffee Waste Reinforced Polyethylene CompositeДокумент4 страницыTensile Properties of Ground Coffee Waste Reinforced Polyethylene CompositemhmmdzulvaОценок пока нет
- RAB PE20Tx1set Amo, 60HP (1) Cetakan 50kg (400 Balok 16 Can) + Ice Storage 50TДокумент3 страницыRAB PE20Tx1set Amo, 60HP (1) Cetakan 50kg (400 Balok 16 Can) + Ice Storage 50THidayat SyamsiОценок пока нет
- An-And-1-106 Basic CAN Bit TimingДокумент9 страницAn-And-1-106 Basic CAN Bit TimingNavneet Singh Pathania100% (1)
- Amplitude Shift KeyingДокумент3 страницыAmplitude Shift KeyingPurnendh ParuchuriОценок пока нет
- Standard Terms & Conditions of Sale Pre-Engineered BuildingsДокумент18 страницStandard Terms & Conditions of Sale Pre-Engineered BuildingsHongducBuiОценок пока нет
- DNF Stand PipeДокумент3 страницыDNF Stand PipeChristopher BrownОценок пока нет
- Manufacturing Layout Analysis - Comparing Flexsim With Excel SpreadsheetsДокумент2 страницыManufacturing Layout Analysis - Comparing Flexsim With Excel Spreadsheetsmano7428Оценок пока нет
- Parts Catalog: F Y 8 - 3 1 F X - 0 0 0Документ86 страницParts Catalog: F Y 8 - 3 1 F X - 0 0 0julian gonzalezОценок пока нет
- Oracle Exadata Technical Series: Smart ScanДокумент59 страницOracle Exadata Technical Series: Smart ScanVishnusivathej PotukanumaОценок пока нет
- Heavy Duty 2.5 Ton Long Frame Floor Jack Product ManualДокумент3 страницыHeavy Duty 2.5 Ton Long Frame Floor Jack Product ManualChris Epler100% (2)