Вам также может понравиться
- XXXVIGinecologia2020 Memoria PDFДокумент204 страницыXXXVIGinecologia2020 Memoria PDFDiana Carolina SilvaОценок пока нет
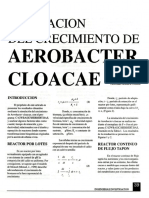
- Dialnet SimulacionDelCrecimientoDeAerobacterCloacae 4902828Документ8 страницDialnet SimulacionDelCrecimientoDeAerobacterCloacae 4902828MANUELAОценок пока нет
- Actividad Semana 1Документ4 страницыActividad Semana 1MANUELAОценок пока нет
- Tesis Aminoglucósidos PDFДокумент254 страницыTesis Aminoglucósidos PDFMANUELAОценок пока нет
- Clase 4Документ10 страницClase 4MANUELAОценок пока нет
- Razonamiento Logico Taller1Документ10 страницRazonamiento Logico Taller1Manuela SanchezОценок пока нет
- FormulaДокумент138 страницFormulaMANUELAОценок пока нет
- Coloración de CapsúlaДокумент7 страницColoración de CapsúlaMANUELAОценок пока нет
- 2017 Recombinación de DNAДокумент31 страница2017 Recombinación de DNAMANUELAОценок пока нет
- Reacciones Homogéneas CatalíticasДокумент3 страницыReacciones Homogéneas CatalíticasingequimicaОценок пока нет
- Estructura Interna de La Tierra - PDFДокумент3 страницыEstructura Interna de La Tierra - PDFBalya Grandez SantillánОценок пока нет
- Tarea 2Документ20 страницTarea 2Jhon Rojas MejiaОценок пока нет
- Taller Actividad 3 ErgonomiaДокумент28 страницTaller Actividad 3 ErgonomiaUniverse MusicОценок пока нет
- SASPLANETДокумент6 страницSASPLANETDiana Stefany QuevedoОценок пока нет
- Las Obras de FábricaДокумент23 страницыLas Obras de FábricaYenny RoxanaОценок пока нет
- 2691 - MATEMÁTICA II - I2AB - 00 - CT - 2 - 2020-2 - Aldonza Santa Cruz MendozaДокумент5 страниц2691 - MATEMÁTICA II - I2AB - 00 - CT - 2 - 2020-2 - Aldonza Santa Cruz Mendozadavid minchan pompaОценок пока нет
- GypsumДокумент18 страницGypsumNoe ZeledónОценок пока нет
- Ensayos DinamicosДокумент36 страницEnsayos DinamicosScarlet Frez BernierОценок пока нет
- Tarea Nº4 Lab - Mantenimiento PlantasДокумент12 страницTarea Nº4 Lab - Mantenimiento PlantasGARY JOAN ACEVEDO CALDERONОценок пока нет
- LAB 7 Arduino Funciones LógicasДокумент6 страницLAB 7 Arduino Funciones Lógicasroger macias marcaОценок пока нет
- Lectura de Un Encoder Con SimulinkДокумент3 страницыLectura de Un Encoder Con SimulinkRafael Aguilar RiosОценок пока нет
- APRENDIZAJES ESPERADOS PRIORIZADOS - 5to GradoДокумент12 страницAPRENDIZAJES ESPERADOS PRIORIZADOS - 5to GradoEmelia Güera Diaz Romero0% (1)
- Repaso Examen DDL DMLДокумент2 страницыRepaso Examen DDL DMLTheGaMer ROTОценок пока нет
- Informe Práctica #3 Momento de Inercia IiДокумент11 страницInforme Práctica #3 Momento de Inercia IiKeidy Mayerli Cortes RozoОценок пока нет
- Ejercicios Propuestos Suelos IIДокумент15 страницEjercicios Propuestos Suelos IIPier Diego H CamОценок пока нет
- E Slide F1 Diseño de Zapatas Aisladas Con SafeДокумент39 страницE Slide F1 Diseño de Zapatas Aisladas Con SafeMario GutiérrezОценок пока нет
- Articles-19986 Recurso Pauta DocДокумент2 страницыArticles-19986 Recurso Pauta DockarinaОценок пока нет
- Amortiguadores de TiempoДокумент134 страницыAmortiguadores de Tiempoluis100% (4)
- Presentacion Ionomeros VitreosДокумент17 страницPresentacion Ionomeros VitreosDairy Maricel Osorto PortilloОценок пока нет
- Dgfa Aprendizajes Esenciales BGДокумент39 страницDgfa Aprendizajes Esenciales BGRigoberto FloresОценок пока нет
- U1 Logicaproposicional 4toДокумент10 страницU1 Logicaproposicional 4toVidal Anchiraico100% (1)
- Terapia AcuaticaДокумент2 страницыTerapia AcuaticaAngie CortesОценок пока нет
- Esquema Electrico Modulo de Comandos Fi24dp32Документ58 страницEsquema Electrico Modulo de Comandos Fi24dp32Samuel AraujoОценок пока нет
- FísicaДокумент2 страницыFísicaOscar ZuritaОценок пока нет
- Ejercicio de Balance 1Документ8 страницEjercicio de Balance 1ELIОценок пока нет
- Ejercicio de Flexion y Corte LB LДокумент8 страницEjercicio de Flexion y Corte LB Lmike_sanОценок пока нет
- Instructivo (1) RONNY MariñoДокумент51 страницаInstructivo (1) RONNY MariñoEdwin Vicente Jara FriasОценок пока нет
- Método PepsДокумент5 страницMétodo Pepswillie almanzarОценок пока нет