Вам также может понравиться
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsОт EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsРейтинг: 3.5 из 5 звезд3.5/5 (6)
- 01 - Basic Electrical CalculationsДокумент17 страниц01 - Basic Electrical CalculationsRagesh JoshiОценок пока нет
- Control of DC Motor Using Different Control StrategiesОт EverandControl of DC Motor Using Different Control StrategiesОценок пока нет
- KemppiДокумент43 страницыKemppiIon SudituОценок пока нет
- Automatic Voltage RegulatorДокумент35 страницAutomatic Voltage Regulatoryousufswh100% (1)
- Resistors in Series and ParallelДокумент27 страницResistors in Series and ParallelRaymund EspinoОценок пока нет
- Philips EverFlo Oxygen Concentrator - Service Manual PDFДокумент108 страницPhilips EverFlo Oxygen Concentrator - Service Manual PDFabekl100% (1)
- PID Control System Analysis and DesignДокумент48 страницPID Control System Analysis and DesignAsghar AliОценок пока нет
- Study of P, PD, Pi, Pid Controllers Using Mat LabДокумент13 страницStudy of P, PD, Pi, Pid Controllers Using Mat LabVignesh NagarajanОценок пока нет
- Analog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignОт EverandAnalog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignОценок пока нет
- Controller TrainingДокумент87 страницController TrainingkhanzulfiОценок пока нет
- VAV Control SequencesДокумент122 страницыVAV Control SequencesShadi AlashkarОценок пока нет
- Best Practices Location-Aware WLAN DesignДокумент70 страницBest Practices Location-Aware WLAN Designkin_tak6238Оценок пока нет
- PID ControlerДокумент30 страницPID ControlerRachmah RizkyОценок пока нет
- Dielectric Response Measurements in Frequency, Temperature and Time DomainsДокумент29 страницDielectric Response Measurements in Frequency, Temperature and Time DomainsRitesh Jaiswal100% (1)
- Biochemistry ES 105Документ1 страницаBiochemistry ES 105Ko Phyo Wai100% (3)
- OTE Outotec Flash Smelting Technology Eng WebДокумент8 страницOTE Outotec Flash Smelting Technology Eng WebcooldoubtlessОценок пока нет
- CDS 101, Lecture 8.1 R. M. Murray, CaltechДокумент7 страницCDS 101, Lecture 8.1 R. M. Murray, CaltechPhisathoОценок пока нет
- Lab 12: Maglev Control 12/8/2010 Frank Laritz II Maxim Markov Alex ProgДокумент14 страницLab 12: Maglev Control 12/8/2010 Frank Laritz II Maxim Markov Alex ProgFrank LaritzОценок пока нет
- 01 - Basic Electrical CalculationsДокумент17 страниц01 - Basic Electrical Calculationsayah_ainaОценок пока нет
- ME306_Lab_4Документ12 страницME306_Lab_4Himanshu BansalОценок пока нет
- Solutions For: Tutorial 12 Stability AnalysisДокумент6 страницSolutions For: Tutorial 12 Stability AnalysisAudrey Patrick KallaОценок пока нет
- Automatic Voltage RegulatorsДокумент35 страницAutomatic Voltage RegulatorsAlejandroHerreraGurideChileОценок пока нет
- CNT-81 & CNT-81R: Timer/Counter/CalibratorsДокумент4 страницыCNT-81 & CNT-81R: Timer/Counter/CalibratorsMichael DixonОценок пока нет
- Lecture 8: From Analog To Digital Controllers, PID Control Design ApproachesДокумент10 страницLecture 8: From Analog To Digital Controllers, PID Control Design ApproachesarafatasgharОценок пока нет
- CDS 101, Lecture 9.2 R. M. Murray, CaltechДокумент7 страницCDS 101, Lecture 9.2 R. M. Murray, Caltechtidjani86Оценок пока нет
- Submitted by Vikrant Rana CH-6276Документ30 страницSubmitted by Vikrant Rana CH-6276vcoolkrazyОценок пока нет
- Pid TuningДокумент19 страницPid TuningAsuh Rifqi Prihandana100% (1)
- MatLab AssignmentДокумент12 страницMatLab AssignmentTher Htet AungОценок пока нет
- Repetitive ControlДокумент22 страницыRepetitive ControlShri KulkarniОценок пока нет
- The Frecuency-Response Design Method: Universidad Politecnica SalesianaДокумент28 страницThe Frecuency-Response Design Method: Universidad Politecnica SalesianaFabiola ChachaОценок пока нет
- Processcontrol Topic13 PidtuningДокумент15 страницProcesscontrol Topic13 Pidtuningmuthukumartharani100% (1)
- MATT Classical ControlДокумент20 страницMATT Classical Controlkumarmanglam228Оценок пока нет
- Loop Shaping Design for Stable Closed Loop SystemДокумент12 страницLoop Shaping Design for Stable Closed Loop SystemHafeezullah KhanОценок пока нет
- Chap 08 Marlin 2002Документ37 страницChap 08 Marlin 2002Audrey Patrick KallaОценок пока нет
- Math 5Документ37 страницMath 5Anonymous UrzdtCB0IОценок пока нет
- The Design of Feedback Control SystemsДокумент36 страницThe Design of Feedback Control SystemsNirmal Kumar PandeyОценок пока нет
- Automatic Control With MatLabДокумент16 страницAutomatic Control With MatLabStephanie PortugalОценок пока нет
- Unit-III - Root LocusДокумент67 страницUnit-III - Root LocusRachana GadeОценок пока нет
- Chapter 10 PID 1Документ36 страницChapter 10 PID 1Taufiq GalangОценок пока нет
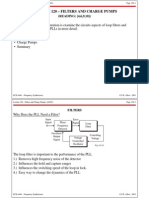
- Charge PumpsДокумент18 страницCharge PumpsBLUEE009Оценок пока нет
- Design PID controllers for PLL loop, disk drive, and heat transfer problemsДокумент2 страницыDesign PID controllers for PLL loop, disk drive, and heat transfer problemsiron standОценок пока нет
- Modeling Separately Excited DC Generator & Armature Controlled DC Shunt Motor Transfer FunctionsДокумент67 страницModeling Separately Excited DC Generator & Armature Controlled DC Shunt Motor Transfer FunctionsaniruthОценок пока нет
- HS-2420RH - Fast Sample and HolДокумент8 страницHS-2420RH - Fast Sample and HolDeepa DevarajОценок пока нет
- Sound Quality Can Be Measured: ConverterДокумент2 страницыSound Quality Can Be Measured: ConverterEmi CabreraОценок пока нет
- 01 MDS IntroductionДокумент79 страниц01 MDS IntroductionchinithОценок пока нет
- 1577066Документ20 страниц1577066hazem saadОценок пока нет
- Frequency Domain Compensation Lead Lag CompensatorsДокумент25 страницFrequency Domain Compensation Lead Lag CompensatorsMehadi Alom ChoudhuryОценок пока нет
- Anti-Islanding TechniquesДокумент32 страницыAnti-Islanding TechniquesHisham MostafaОценок пока нет
- Leading Software for Geotechnical TestingДокумент5 страницLeading Software for Geotechnical TestingHoracio UlloaОценок пока нет
- Process Control PreliminariesДокумент25 страницProcess Control PreliminariesJeremy ColemanОценок пока нет
- Control Loop Response To Setpoint Change With PID ControlДокумент3 страницыControl Loop Response To Setpoint Change With PID ControlwenoОценок пока нет
- Assignment-02: Shikha Gupta 11536019 M.Tech (IT)Документ6 страницAssignment-02: Shikha Gupta 11536019 M.Tech (IT)divya_sachan22Оценок пока нет
- Controller Design Based On Transient Response CriteriaДокумент45 страницController Design Based On Transient Response CriteriaVijay RajaindranОценок пока нет
- Make It Easier For Other People To Find Your Content by Providing More Information About It.Документ45 страницMake It Easier For Other People To Find Your Content by Providing More Information About It.Osy OsyОценок пока нет
- AMME3500/9501 System Dynamics and Control Problem Set 11Документ3 страницыAMME3500/9501 System Dynamics and Control Problem Set 11Quazar001Оценок пока нет
- Compensation Homework With A QuizДокумент14 страницCompensation Homework With A QuizFahad KhosaОценок пока нет
- PURE PresentationДокумент34 страницыPURE PresentationRadha LahotiОценок пока нет
- Control Systems Theory Cep Problem With SolutionДокумент6 страницControl Systems Theory Cep Problem With Solutionahmad8000010101Оценок пока нет
- g5340 250kw Kohler GeneratorДокумент4 страницыg5340 250kw Kohler Generatorwilliam000111Оценок пока нет
- Using MATLAB in Feedback Systems DesignДокумент18 страницUsing MATLAB in Feedback Systems DesignLê Tuấn Minh100% (1)
- DCS Lab 7 Report (Zain, Umer, Abdullah)Документ10 страницDCS Lab 7 Report (Zain, Umer, Abdullah)Muhammad UmerОценок пока нет
- Control System-Ii Lab File: Bachelor of Engineering (Division of Instrumentation & ControlДокумент41 страницаControl System-Ii Lab File: Bachelor of Engineering (Division of Instrumentation & ControlParas SinghОценок пока нет
- Input Output ControllabilityДокумент20 страницInput Output ControllabilityZulfansyah MuchtarОценок пока нет
- Surface EMG Design PDFДокумент22 страницыSurface EMG Design PDFJuan LizamaОценок пока нет
- Linear Algebra Review-Penn State UnivДокумент53 страницыLinear Algebra Review-Penn State UnivcooldoubtlessОценок пока нет
- PR - L2-Review of Statistics and ProbabilityДокумент23 страницыPR - L2-Review of Statistics and ProbabilitycooldoubtlessОценок пока нет
- FS Series: FSS Low Profile Force SensorsДокумент4 страницыFS Series: FSS Low Profile Force SensorscooldoubtlessОценок пока нет
- PR - L1-Introduction To Pattern Recognition PDFДокумент20 страницPR - L1-Introduction To Pattern Recognition PDFcooldoubtlessОценок пока нет
- A Model of A Synthetic Biological Communication Interface Between Mammalian Cells and Mechatronic SystemsДокумент7 страницA Model of A Synthetic Biological Communication Interface Between Mammalian Cells and Mechatronic SystemscooldoubtlessОценок пока нет
- Lavry-White-Paper-The Optimal Sample Rate For Quality Audio PDFДокумент6 страницLavry-White-Paper-The Optimal Sample Rate For Quality Audio PDFcooldoubtlessОценок пока нет
- PR - L2-Review of Statistics and ProbabilityДокумент23 страницыPR - L2-Review of Statistics and ProbabilitycooldoubtlessОценок пока нет
- Close Integration of A UHF-RFID Transponder Into A Limb Prosthesis For Tracking and SensingДокумент8 страницClose Integration of A UHF-RFID Transponder Into A Limb Prosthesis For Tracking and SensingcooldoubtlessОценок пока нет
- ACF Matlab (1) DДокумент8 страницACF Matlab (1) Dcooldoubtless100% (1)
- Analog and Sampled Time Domain Plot Sampled Signal Frequency PlotДокумент6 страницAnalog and Sampled Time Domain Plot Sampled Signal Frequency PlotSyed Baqar HussainОценок пока нет
- 15Khz Low Pass Filter 5Khz Low Pass Filter 15Khz High Pass FilterДокумент7 страниц15Khz Low Pass Filter 5Khz Low Pass Filter 15Khz High Pass FilterdivdudejaОценок пока нет
- Deluca Surface Electromyography Detection&RecordingДокумент10 страницDeluca Surface Electromyography Detection&RecordingJuan Rodriguez IIIОценок пока нет
- Bioelectrical 416Документ51 страницаBioelectrical 416cooldoubtlessОценок пока нет
- A Two-Pass Hyklpjklbrid Training Algorithm For RBF NetworksДокумент4 страницыA Two-Pass Hyklpjklbrid Training Algorithm For RBF NetworkscooldoubtlessОценок пока нет
- Motor Speed Sensors PDFДокумент18 страницMotor Speed Sensors PDFAmmar Al-KindyОценок пока нет
- HHHДокумент10 страницHHHcooldoubtlessОценок пока нет
- STC Lecture Series: An Introduction To The Kalman FilterДокумент0 страницSTC Lecture Series: An Introduction To The Kalman FilterTrần Nhật HưngОценок пока нет
- Bluetooth To Serial Modules: Deal Extreme, Part # 80711Документ8 страницBluetooth To Serial Modules: Deal Extreme, Part # 80711cooldoubtlessОценок пока нет
- Zig Bee Ile PLC HaberleşmesiДокумент21 страницаZig Bee Ile PLC HaberleşmesicooldoubtlessОценок пока нет
- Audio and Waveform Generation Using The DACДокумент19 страницAudio and Waveform Generation Using The DACcooldoubtlessОценок пока нет
- 41889Документ6 страниц41889cooldoubtlessОценок пока нет
- Direction Cosine Matrix IMU: TheoryДокумент30 страницDirection Cosine Matrix IMU: TheoryNeelam ShuklaОценок пока нет
- Stm32f4 Discovery DatasheetДокумент154 страницыStm32f4 Discovery DatasheetArtur JunqueiraОценок пока нет
- DDI0439B Cortex m4 r0p0 TRMДокумент117 страницDDI0439B Cortex m4 r0p0 TRMcooldoubtlessОценок пока нет
- Radio Altimeter ExplainedДокумент4 страницыRadio Altimeter ExplainedKoustubh VadalkarОценок пока нет
- DS POSITION INDICATOR EN Rev01Документ3 страницыDS POSITION INDICATOR EN Rev01Ronak PatelОценок пока нет
- Activity No. 2: Voltage Divider and Current Divider Circuit DesignДокумент5 страницActivity No. 2: Voltage Divider and Current Divider Circuit DesignFe Shannen CincoОценок пока нет
- DSP Lab # 8 Sampling in Time Domain: QuestionsДокумент3 страницыDSP Lab # 8 Sampling in Time Domain: QuestionsnoumanОценок пока нет
- Aurasemi - Timing BU - Main - PresentationДокумент72 страницыAurasemi - Timing BU - Main - PresentationAnindyaSahaОценок пока нет
- Skripsi Tanpa Bab Pembahasan PDFДокумент56 страницSkripsi Tanpa Bab Pembahasan PDFirvanaditiaОценок пока нет
- Technical Information System Overview Prosafe-Com 3.00 Prosafe-ComДокумент49 страницTechnical Information System Overview Prosafe-Com 3.00 Prosafe-Comshekoofe danaОценок пока нет
- Optimize Drive ParametersДокумент4 страницыOptimize Drive ParametersHeru HaryantoОценок пока нет
- How To Prepare For Quantitative AptitudeДокумент4 страницыHow To Prepare For Quantitative AptitudePardha SaradhiОценок пока нет
- DataSheet ONT ZYXEL PX3321-T1 AX3000Документ2 страницыDataSheet ONT ZYXEL PX3321-T1 AX3000Phillipe CruzОценок пока нет
- Product Features: GPRS Solutions For Serial ConnectionsДокумент2 страницыProduct Features: GPRS Solutions For Serial ConnectionsVishwas MaritronicsОценок пока нет
- Battery Charger CTEK - MXS 5.0 - ENДокумент6 страницBattery Charger CTEK - MXS 5.0 - ENVladimirОценок пока нет
- Latest Equipment CompilationДокумент7 страницLatest Equipment CompilationRoger WehbeОценок пока нет
- Digital Design and Computer Organization - BCS302 - LAB MANUALДокумент65 страницDigital Design and Computer Organization - BCS302 - LAB MANUALpadmОценок пока нет
- Information Brochure Cit Entrance Examination 2019 17Документ70 страницInformation Brochure Cit Entrance Examination 2019 17Sarash smit kashyapОценок пока нет
- ADC and Power Optimization With tinyAVR® 0 - and 1 - Series, and megaAVR® 0-SeriesДокумент62 страницыADC and Power Optimization With tinyAVR® 0 - and 1 - Series, and megaAVR® 0-SeriessaifulkohОценок пока нет
- Detailed Syllabus - Optical CommunicationДокумент3 страницыDetailed Syllabus - Optical Communicationiamitgarg7Оценок пока нет
- L3 RF Troubleshooting Guide XT1650-01-XT1650-02-XT1650-03-XT1650-05 V1.0.pdf MOTO Z PDFДокумент298 страницL3 RF Troubleshooting Guide XT1650-01-XT1650-02-XT1650-03-XT1650-05 V1.0.pdf MOTO Z PDFesdiguenОценок пока нет
- Defensepro TsДокумент1 страницаDefensepro TsPhu TranОценок пока нет
- Io ListДокумент12 страницIo ListKrishОценок пока нет
- Low Noise Design Schematics GuideДокумент3 страницыLow Noise Design Schematics GuidezluiznetoОценок пока нет
- 03 Literature ReviewДокумент10 страниц03 Literature ReviewSrushti PatoliОценок пока нет
- Infineon TLE9832 DS v01 01 enДокумент94 страницыInfineon TLE9832 DS v01 01 enBabei Ionut-MihaiОценок пока нет
- Tutorial - Cdma2000 Technology Family - 1xRTT, EVDO, UMB, and EVDV - EogogicsДокумент24 страницыTutorial - Cdma2000 Technology Family - 1xRTT, EVDO, UMB, and EVDV - EogogicsAmmar IkramОценок пока нет
- Go Getter 2 Owners ManualДокумент21 страницаGo Getter 2 Owners ManualBrian LewОценок пока нет