Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- NNДокумент22 страницыNNwoodpecker029100% (1)
- Gop Pedophiles ListДокумент3 страницыGop Pedophiles ListUploader100% (5)
- Armscor - Squires Bingham 20 ManualДокумент9 страницArmscor - Squires Bingham 20 Manualmceldridge50% (2)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- PEDOPHILES IP Shared CP in P2PДокумент277 страницPEDOPHILES IP Shared CP in P2PUploader0% (2)
- Astm B19Документ6 страницAstm B19Davor IbarraОценок пока нет
- Eplf & PFDJ 9-18-08Документ16 страницEplf & PFDJ 9-18-08Kurt PandaОценок пока нет
- Guccifer Drumheller Blumenthal Memos PDFДокумент47 страницGuccifer Drumheller Blumenthal Memos PDFUploaderОценок пока нет
- Planet X - Nibiru Is Probably Real (I Always Knew This But Avoided The Topic) PDFДокумент17 страницPlanet X - Nibiru Is Probably Real (I Always Knew This But Avoided The Topic) PDFUploader100% (2)
- Identity Operations For Strategic LandpowerДокумент13 страницIdentity Operations For Strategic LandpowerLorri AndersonОценок пока нет
- PROPHECY - What GOD Says About The Black People in America and The Soon Coming Ethnic WarfareДокумент1 страницаPROPHECY - What GOD Says About The Black People in America and The Soon Coming Ethnic WarfareUploaderОценок пока нет
- Clearance of DoD Information For Public Release Dodd-5230-09 PDFДокумент7 страницClearance of DoD Information For Public Release Dodd-5230-09 PDFUploaderОценок пока нет
- Clearance of DoD Information For Public Release Dodd-5230-09 PDFДокумент7 страницClearance of DoD Information For Public Release Dodd-5230-09 PDFUploaderОценок пока нет
- 3 Associated Cases of Drake V Alexander Et Al PDFДокумент68 страниц3 Associated Cases of Drake V Alexander Et Al PDFUploaderОценок пока нет
- Drake V Alexander Court Order On ProceduresДокумент6 страницDrake V Alexander Court Order On ProceduresUploaderОценок пока нет
- FBI Counterintelligence Strategic Partnership Note - Preventing Loss of Academic Research PDFДокумент6 страницFBI Counterintelligence Strategic Partnership Note - Preventing Loss of Academic Research PDFUploaderОценок пока нет
- Marine Corps Cyberspace Operations FOUO Mcip-3-40-02 PDFДокумент40 страницMarine Corps Cyberspace Operations FOUO Mcip-3-40-02 PDFUploaderОценок пока нет
- Integrated Bar of The Philippines v. Hon. Ronaldo B. ZamoraДокумент16 страницIntegrated Bar of The Philippines v. Hon. Ronaldo B. ZamorabearzhugОценок пока нет
- The Cantonments Act, 2006Документ118 страницThe Cantonments Act, 2006Nachiket KshirsagarОценок пока нет
- Did You Know: OnnectionsДокумент1 страницаDid You Know: OnnectionsHartford CourantОценок пока нет
- Primary Source Analysis: Crizelle P. Nayle Maed-Social StudiesДокумент31 страницаPrimary Source Analysis: Crizelle P. Nayle Maed-Social StudiesCrizelle NayleОценок пока нет
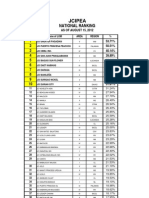
- 2012 Jcipea National Ranking As of August 15, 2012Документ4 страницы2012 Jcipea National Ranking As of August 15, 2012regtibzОценок пока нет
- Shogun - Total Unit GuideДокумент9 страницShogun - Total Unit Guidefernando_canato5422Оценок пока нет
- 37 Light OB PDFДокумент187 страниц37 Light OB PDFShashank KumarОценок пока нет
- Whoarethemarines 1Документ1 страницаWhoarethemarines 1api-264110417Оценок пока нет
- ''Normative Power in Europe PDFДокумент19 страниц''Normative Power in Europe PDFIsabela PavălОценок пока нет
- Star Wars BooksДокумент10 страницStar Wars BookssairvaОценок пока нет
- Rocket Center Peenemunde - Personal MemoriesДокумент11 страницRocket Center Peenemunde - Personal MemoriesDag Erik Skagmo100% (1)
- Bali 4.3 1 PDFДокумент1 страницаBali 4.3 1 PDFkryptomaniaОценок пока нет
- Serv. Soc. 5° 17-20Документ731 страницаServ. Soc. 5° 17-20Jair Velazquez ReyesОценок пока нет
- Karl Bilt KnjigaДокумент3 страницыKarl Bilt KnjigaAna NovovicОценок пока нет
- Myanmar Police ForceДокумент19 страницMyanmar Police ForceMarinel Padilla PinedaОценок пока нет
- Pre Conference Final ProgДокумент2 страницыPre Conference Final ProgkeithlyndОценок пока нет
- Syllabus: Cambridge O Level History 2147Документ37 страницSyllabus: Cambridge O Level History 2147Zeryab AamerОценок пока нет
- Bomber Story PDFДокумент3 страницыBomber Story PDFKarry TaylorОценок пока нет
- AustraliaДокумент8 страницAustraliaRajamohanОценок пока нет
- K.J Parker, Engineer Trilogy Book 1Документ418 страницK.J Parker, Engineer Trilogy Book 1xeroxcandybar100% (1)
- Outer Ring: Flash HiderДокумент6 страницOuter Ring: Flash HiderPhong LêОценок пока нет
- Pravartee Sales PVT LTDДокумент55 страницPravartee Sales PVT LTDJeeshan IdrisiОценок пока нет
- G. Roth & C. Krnka.: WitnessesДокумент6 страницG. Roth & C. Krnka.: Witnessescll1968Оценок пока нет
- Aviation Classics 5 - English Electric LightningДокумент132 страницыAviation Classics 5 - English Electric LightningCem Avci100% (2)
- Warmachine Reference SheetДокумент2 страницыWarmachine Reference SheetRick ThatcherОценок пока нет
- Bangladesh Navy Special Warfare Diving and Salvage (Swads) : 2. OrganizationДокумент4 страницыBangladesh Navy Special Warfare Diving and Salvage (Swads) : 2. Organizationiqbal1154Оценок пока нет