Вам также может понравиться
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- ASM 12cДокумент304 страницыASM 12cFrank Hack100% (2)
- Tokenization Everything You Need To KnowДокумент21 страницаTokenization Everything You Need To KnowJose Alberto Lopez PatiñoОценок пока нет
- Design Pattern by SEKHAR SIRДокумент42 страницыDesign Pattern by SEKHAR SIRRakesh Kumar67% (6)
- Oracle Cloud Infrastructure Associate Arch Part 1 QuizДокумент75 страницOracle Cloud Infrastructure Associate Arch Part 1 QuizmanmohanshahОценок пока нет
- Empowerment Technologies Q3 M13Документ16 страницEmpowerment Technologies Q3 M13Joanne Marielle Veloria100% (1)
- Automation Testing ThesisДокумент7 страницAutomation Testing Thesisjenniferlettermanspringfield100% (2)
- App-V Recipe For Office 2010 RTM Deployment Kit v3Документ10 страницApp-V Recipe For Office 2010 RTM Deployment Kit v3Hemanth RamОценок пока нет
- Phishing Attack - Step by Step Demo Using Kali Linux Free Tool!Документ8 страницPhishing Attack - Step by Step Demo Using Kali Linux Free Tool!micheal kingОценок пока нет
- Capstone User Guide (UI-5400)Документ189 страницCapstone User Guide (UI-5400)Fernando Andres JegzОценок пока нет
- ORACLE SQL, PL - SQL - Find NTH Highest - Minimum Salary From TableДокумент6 страницORACLE SQL, PL - SQL - Find NTH Highest - Minimum Salary From TableRahul JhaОценок пока нет
- Python 03 ExercisesДокумент5 страницPython 03 ExercisesSamuel SCОценок пока нет
- ENSA Questions AnswersДокумент18 страницENSA Questions AnswersNurul ShakirahОценок пока нет
- TMS320 C 50Документ774 страницыTMS320 C 50tnj_dineshОценок пока нет
- ST 2 Gr.6 Arts With TosДокумент5 страницST 2 Gr.6 Arts With Toshazel dileОценок пока нет
- 1a - Boehm Software EconomicsДокумент19 страниц1a - Boehm Software EconomicsBAYERN JOELОценок пока нет
- AiogramДокумент257 страницAiogramJeff NguebouОценок пока нет
- Available Translation AssignmentsДокумент5 страницAvailable Translation AssignmentsIvana HristovaОценок пока нет
- Field Application Engineer Salary (India)Документ5 страницField Application Engineer Salary (India)Mehul PatelОценок пока нет
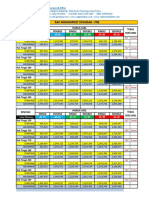
- Rak Minimarket Standar - P90: Single Double Single Double Single Double Rincian Harga Jual Tebal ShelvingДокумент6 страницRak Minimarket Standar - P90: Single Double Single Double Single Double Rincian Harga Jual Tebal ShelvingAndi HadisaputraОценок пока нет
- Mitsubishi Forklift Trucks Mcfe Epc 05 2019 Spare Parts CatalogueДокумент23 страницыMitsubishi Forklift Trucks Mcfe Epc 05 2019 Spare Parts Cataloguechristopherwhite101288dxj100% (121)
- Mini ServoДокумент2 страницыMini ServoShukri FaezОценок пока нет
- Winoncd 3.6 ManualДокумент186 страницWinoncd 3.6 ManualestudiocodecОценок пока нет
- A Student Attendance System With Fingerprint Scanner Integration For Strathmore UniversityДокумент81 страницаA Student Attendance System With Fingerprint Scanner Integration For Strathmore UniversitySandro Zinga Dos santosОценок пока нет
- Installing The BIRT Viewer in Tomcat and JbossДокумент3 страницыInstalling The BIRT Viewer in Tomcat and Jbosstoba_sayed100% (2)
- Monitor and Support Data ConversionДокумент24 страницыMonitor and Support Data ConversionAmanuel KassaОценок пока нет
- Answer The Following Questions: Course Specializationna Year Paper Code Bca-102 Subject Min. Marks Max. Marks DurationДокумент1 страницаAnswer The Following Questions: Course Specializationna Year Paper Code Bca-102 Subject Min. Marks Max. Marks DurationGajendra SinghОценок пока нет
- Resume Final Draft KarlacruzДокумент1 страницаResume Final Draft Karlacruzapi-708125386Оценок пока нет
- Ali Hammoud: Web Company - DOTCOMДокумент2 страницыAli Hammoud: Web Company - DOTCOMSuvendu BishoyiОценок пока нет
- (Common To Cse, It, Ai&Ml, DS) : Computer Networ Web Technology Laboratory ManualДокумент138 страниц(Common To Cse, It, Ai&Ml, DS) : Computer Networ Web Technology Laboratory ManualchintuОценок пока нет
- Blockchain Smart Contracts FormalizationДокумент16 страницBlockchain Smart Contracts FormalizationAvishek DuttaОценок пока нет