Вам также может понравиться
- Peripheral Interfacing Unit Iii: Mr. S. Vinod Lecturer Eee DepartmentДокумент123 страницыPeripheral Interfacing Unit Iii: Mr. S. Vinod Lecturer Eee DepartmentVinod SrinivasanОценок пока нет
- PIC18 Architecture 1Документ104 страницыPIC18 Architecture 1Danish Ur RahmanОценок пока нет
- 8085 Paper Presentation 1232646931472979 2Документ112 страниц8085 Paper Presentation 1232646931472979 2Mansi Shah ShroffОценок пока нет
- Hardware PracticalsДокумент51 страницаHardware PracticalsHarsh AlkutkarОценок пока нет
- Chapter 6 Basic Input and Output InterfaceДокумент38 страницChapter 6 Basic Input and Output InterfacePetra Kalasa100% (1)
- I/O and The 8255 Isa Bus InterfacingДокумент46 страницI/O and The 8255 Isa Bus Interfacingphuctrung9119Оценок пока нет
- Unit IV 8255 PIO Programmable Input Output PortДокумент42 страницыUnit IV 8255 PIO Programmable Input Output Portadithya12345690% (10)
- Chapter 11Документ40 страницChapter 11sandeep4672kvkОценок пока нет
- 8086 MicroprocessorДокумент32 страницы8086 MicroprocessorMohamedОценок пока нет
- Chapter 7 Programmable Interface and ApplicationДокумент79 страницChapter 7 Programmable Interface and ApplicationPetra KalasaОценок пока нет
- Microprocessor History1Документ40 страницMicroprocessor History1Rozitarmizi MohammadОценок пока нет
- MicroprocessorPPT 1Документ40 страницMicroprocessorPPT 1Gaurav KispottaОценок пока нет
- Biomedical Engineering B.E III Year System Designing With MicrocontrollerДокумент18 страницBiomedical Engineering B.E III Year System Designing With MicrocontrollerREKHA SENCHA gs0801bm161043Оценок пока нет
- An Application of 8085 Register Interfacing With LedДокумент13 страницAn Application of 8085 Register Interfacing With LedDivya KrishnanОценок пока нет
- PIC Microcontrollers: Low-End ArchitecturesДокумент46 страницPIC Microcontrollers: Low-End Architecturesvivek2585Оценок пока нет
- I/O System Design: Dr. Esam Al - Qaralleh CE Department Princess Sumaya University For TechnologyДокумент74 страницыI/O System Design: Dr. Esam Al - Qaralleh CE Department Princess Sumaya University For TechnologyFemina VijayarajОценок пока нет
- Microprocessor - Introduction (8085)Документ36 страницMicroprocessor - Introduction (8085)Aman SinghОценок пока нет
- 8085 Microprocessor-BCA VIДокумент113 страниц8085 Microprocessor-BCA VIMarieFernandesОценок пока нет
- Topic 3 Processor FunctionДокумент52 страницыTopic 3 Processor FunctionTharinda LasithaОценок пока нет
- CS321 Computer ArchitectureДокумент160 страницCS321 Computer ArchitectureAnurag kumarОценок пока нет
- Chapter-8 (Part-I) : (Programmable Peripheral Interface)Документ12 страницChapter-8 (Part-I) : (Programmable Peripheral Interface)belihuОценок пока нет
- 8085 Processor Unit I: Mr. S. VinodДокумент52 страницы8085 Processor Unit I: Mr. S. VinodVinod SrinivasanОценок пока нет
- Unit Iv Pic MicrocontrollerДокумент68 страницUnit Iv Pic MicrocontrollerShubham MadneОценок пока нет
- HCS12Документ36 страницHCS12alzyoud100% (2)
- InOutPelan Induk Perindustrian (PIP) 1986 Pengenalan Sejak mencapai kemerdekaan, kerajaan Malaysia telah menggiatkan usaha kearah mewujudkan Malaysia sebagai sebuah Negara perindustrian. Usaha ini merupakan satu langkah baharu kerajaan untuk mempelbagaikan sektor ekonomi Negara supaya tidak hanya bergantung kepada getah dan bijih timah sahaja. • Usaha kerajaan bukan sahaja untuk memajukan Negara dengan cara mempelbagaikan kegiatan perindustrian, tetapi juga untuk menyediakan peluang pekerjaan yang lebih banyak kepada rakyat. Selain menyediakan peluang pekerjaan, sektor ini juga akan dapat menjadi pengeksport utama Negara dan menyediakan latihan teknikal serta kemahiran kepada rakyat tempatan. • Memandangkan dasar kerajaan untuk menjadikan sektor perindustriam sebagai industi utama Negara dalam jangka masa panjang, pihak kerajaan telah menubuhkan satu jawatankuasa kajian Dasar Perindustrian Negara dan Pelan Induk Perindustrian (PIP) pada 3 Febuari 1986 untuk menyemakДокумент42 страницыInOutPelan Induk Perindustrian (PIP) 1986 Pengenalan Sejak mencapai kemerdekaan, kerajaan Malaysia telah menggiatkan usaha kearah mewujudkan Malaysia sebagai sebuah Negara perindustrian. Usaha ini merupakan satu langkah baharu kerajaan untuk mempelbagaikan sektor ekonomi Negara supaya tidak hanya bergantung kepada getah dan bijih timah sahaja. • Usaha kerajaan bukan sahaja untuk memajukan Negara dengan cara mempelbagaikan kegiatan perindustrian, tetapi juga untuk menyediakan peluang pekerjaan yang lebih banyak kepada rakyat. Selain menyediakan peluang pekerjaan, sektor ini juga akan dapat menjadi pengeksport utama Negara dan menyediakan latihan teknikal serta kemahiran kepada rakyat tempatan. • Memandangkan dasar kerajaan untuk menjadikan sektor perindustriam sebagai industi utama Negara dalam jangka masa panjang, pihak kerajaan telah menubuhkan satu jawatankuasa kajian Dasar Perindustrian Negara dan Pelan Induk Perindustrian (PIP) pada 3 Febuari 1986 untuk menyemakPak TamОценок пока нет
- Assembly Language Lecture 5Документ20 страницAssembly Language Lecture 5Ayush SinghОценок пока нет
- Microprocessors 4Документ9 страницMicroprocessors 4Ajnamol N RОценок пока нет
- Unit 3Документ122 страницыUnit 3sarokumaarОценок пока нет
- Ilovepdf MergedДокумент430 страницIlovepdf MergedYuvraj ChhabraОценок пока нет
- 8085 MicroprocessorДокумент36 страниц8085 MicroprocessorRuthra DeviОценок пока нет
- Introduction To 8085 MicroprocessorДокумент37 страницIntroduction To 8085 MicroprocessorAmit BeheraОценок пока нет
- Mces03 8051alp PDFДокумент17 страницMces03 8051alp PDFIndranilОценок пока нет
- Addressing Modes & Instruction SetДокумент39 страницAddressing Modes & Instruction SetlekaОценок пока нет
- 8085 MicroprocessorДокумент114 страниц8085 MicroprocessorlvsaruОценок пока нет
- 8085 Intel MicroprocessorДокумент16 страниц8085 Intel MicroprocessorMartino Ojwok AjangnayОценок пока нет
- Unit 4Документ108 страницUnit 4Rasool NayabОценок пока нет
- Micro-Processors 8085: D.Arun KumarДокумент52 страницыMicro-Processors 8085: D.Arun Kumarsrihari yandrapragadaОценок пока нет
- Introduction To Io InterfaceДокумент30 страницIntroduction To Io InterfaceSafa MОценок пока нет
- 8051 MicrocontrollerДокумент222 страницы8051 Microcontrollergirish100% (1)
- 8085 Memory InterfacingДокумент17 страниц8085 Memory InterfacingMadhavan SamОценок пока нет
- Microprocessor Ramesh S GaonkarДокумент25 страницMicroprocessor Ramesh S GaonkarAbraiz Khan KhattakОценок пока нет
- 8255 AДокумент18 страниц8255 ARani MohanlalОценок пока нет
- RTC InterfacingДокумент18 страницRTC InterfacingAshis karmakarОценок пока нет
- CSE2006 LabДокумент33 страницыCSE2006 LabBharath BunnyОценок пока нет
- 8086 I/O Interfacing & Programming - Part I: Vtu - Edusat ProgrammeДокумент19 страниц8086 I/O Interfacing & Programming - Part I: Vtu - Edusat ProgrammeChethanОценок пока нет
- Avr Addressing ModesДокумент15 страницAvr Addressing ModesDhaval PatelОценок пока нет
- Basic State Transitions - Machine Cycle and Instruction Cycles - Timing Diagram - Data Transfer InstructionsДокумент71 страницаBasic State Transitions - Machine Cycle and Instruction Cycles - Timing Diagram - Data Transfer InstructionsAarush TimalsinaОценок пока нет
- Programming The 8051/8052Документ33 страницыProgramming The 8051/8052vali29Оценок пока нет
- DSP Processor FundamentalsДокумент58 страницDSP Processor FundamentalsSayee KrishnaОценок пока нет
- ExamДокумент114 страницExamVishnu KrishnaОценок пока нет
- Expt. No. 4 Interfacing Display Devices With 8051Документ13 страницExpt. No. 4 Interfacing Display Devices With 8051UJОценок пока нет
- Md. Iftekharul Islam Sakib Lecturer Cse, BuetДокумент45 страницMd. Iftekharul Islam Sakib Lecturer Cse, BuetMd. Moniruzzaman100% (1)
- HC11 ArchitectureДокумент28 страницHC11 ArchitecturebaabysОценок пока нет
- Submitted By: Aanchal Chaudhary Enrollment No.-Jnu-jpr-2011/00871Документ17 страницSubmitted By: Aanchal Chaudhary Enrollment No.-Jnu-jpr-2011/00871Sonu LovesforuОценок пока нет
- Projects With Microcontrollers And PICCОт EverandProjects With Microcontrollers And PICCРейтинг: 5 из 5 звезд5/5 (1)
- PIC Projects and Applications using C: A Project-based ApproachОт EverandPIC Projects and Applications using C: A Project-based ApproachРейтинг: 4 из 5 звезд4/5 (2)
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960От EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Оценок пока нет
- MicccДокумент12 страницMicccomОценок пока нет
- CLC2622 Flyer EngДокумент1 страницаCLC2622 Flyer EngSupremebettas PkuОценок пока нет
- Memory HierarchyДокумент47 страницMemory Hierarchypranali suryawanshi100% (1)
- Proposal For HP Server-2Документ3 страницыProposal For HP Server-2Paras MalhotraОценок пока нет
- Bài Thí Nghiệm 2 I. Thí nghiệm 2.1 - Thiết kế bộ cộng hai số 4 bit. 1. Yêu cầu: Thiết kế bộ ALU (Arithmetic and Logic Unit) thực hiện 1. Thiết kế: a) Sơ đồ khối (Block Diagram) - b) VHDL CodeДокумент17 страницBài Thí Nghiệm 2 I. Thí nghiệm 2.1 - Thiết kế bộ cộng hai số 4 bit. 1. Yêu cầu: Thiết kế bộ ALU (Arithmetic and Logic Unit) thực hiện 1. Thiết kế: a) Sơ đồ khối (Block Diagram) - b) VHDL CodeBảo Kỳ NguyễnОценок пока нет
- Mother BoardДокумент32 страницыMother BoardSrikanth PulikantiОценок пока нет
- Rajalakshmi Engineering College, Thandalam. Department of Ece Laboratory PlanДокумент1 страницаRajalakshmi Engineering College, Thandalam. Department of Ece Laboratory PlanBalaji DuraiyanОценок пока нет
- 970A-G45 Seres: MS-7693 (v1.x) ManboardДокумент76 страниц970A-G45 Seres: MS-7693 (v1.x) ManboardHard SarcoОценок пока нет
- Activity 2Документ6 страницActivity 2api-492104888Оценок пока нет
- Datasheet - HK Mx29lv640ebti-70g 4620702Документ61 страницаDatasheet - HK Mx29lv640ebti-70g 4620702TN EDM MusicОценок пока нет
- 10 8255 Ppi & 8254a PitДокумент24 страницы10 8255 Ppi & 8254a PitAlya CookОценок пока нет
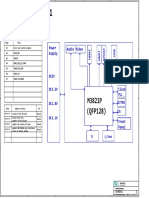
- M3821P (QFP128) : Power Supply Video AudioДокумент8 страницM3821P (QFP128) : Power Supply Video AudioAjay VaishОценок пока нет
- Module-II Logic Gates & Logic FamiliesДокумент143 страницыModule-II Logic Gates & Logic Familiesvamshi krishna veerakotiОценок пока нет
- AVR Atmega2560 Input Output PeripheralsДокумент3 страницыAVR Atmega2560 Input Output PeripheralsmathstopperОценок пока нет
- 6-Delay-Fault Testing TutorialДокумент36 страниц6-Delay-Fault Testing TutorialAdhi SuruliОценок пока нет
- Digital Logic Circuit DesignДокумент8 страницDigital Logic Circuit DesignSAMОценок пока нет
- P25D80H PuyaДокумент65 страницP25D80H PuyaHuanОценок пока нет
- Pass Transistor LogicДокумент36 страницPass Transistor LogicMuneza NaeemОценок пока нет
- Mis Question PaperДокумент4 страницыMis Question PaperddeekshitadharaniОценок пока нет
- YatsfyafsyyДокумент18 страницYatsfyafsyysreenu mОценок пока нет
- 2017 Scheme ISEДокумент85 страниц2017 Scheme ISEEshwar DevaramaneОценок пока нет
- THEVA12LVDR820 Manual Rev.1.00 E PDFДокумент4 страницыTHEVA12LVDR820 Manual Rev.1.00 E PDFAnarsinh SolankiОценок пока нет
- The Golden Rule of OverClocking IДокумент7 страницThe Golden Rule of OverClocking IgcatrinelОценок пока нет
- Pciec TutorialДокумент305 страницPciec Tutorialshamshim2000Оценок пока нет
- Sun OBPДокумент30 страницSun OBPgoyaltcsОценок пока нет
- Clock Domain CrossingДокумент5 страницClock Domain CrossingRAGUL RAJ SОценок пока нет
- Microprocessor Assembly Language Programming: 2.7 Loop and BranchДокумент22 страницыMicroprocessor Assembly Language Programming: 2.7 Loop and BranchMohamad AzimОценок пока нет
- Lec 11 Introduction To Digital ElectronicsДокумент43 страницыLec 11 Introduction To Digital ElectronicsDassintakashimaОценок пока нет
- Component of ComputerДокумент8 страницComponent of Computerparamesvary kannanОценок пока нет
- Sony SA-AKX10 PDFДокумент18 страницSony SA-AKX10 PDFJames Edwin Arlantt TorresОценок пока нет