Вам также может понравиться
- Differentiation of Vectors: 4.1 Vector-Valued FunctionsДокумент17 страницDifferentiation of Vectors: 4.1 Vector-Valued FunctionsMirabella AstraОценок пока нет
- Cats Are Not PeaДокумент294 страницыCats Are Not PeaMirabella AstraОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- 5.3 Diagonalization: PDP × NДокумент6 страниц5.3 Diagonalization: PDP × NWilfred KengaОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Notes On Derivatives of VectorsДокумент12 страницNotes On Derivatives of VectorsMirabella AstraОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Houses in TraditionalДокумент1 страницаHouses in TraditionalMirabella AstraОценок пока нет
- Seven Lots of Vice and VirtueДокумент7 страницSeven Lots of Vice and Virtueshadowgraph100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Human EvolutionДокумент374 страницыHuman EvolutionMirabella Astra100% (10)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Arnold Review 2012Документ22 страницыArnold Review 2012Mirabella AstraОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Concave Inflection Cusp Tangent AsymptoteДокумент17 страницConcave Inflection Cusp Tangent AsymptoteMirabella AstraОценок пока нет
- DG Chap18Документ6 страницDG Chap18Mirabella AstraОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Woman Who Changed Her BrainДокумент249 страницThe Woman Who Changed Her BrainMirabella Astra100% (3)
- Is Rett Syndrome A Loss-Of-Imprinting Disorder?: News and ViewsДокумент2 страницыIs Rett Syndrome A Loss-Of-Imprinting Disorder?: News and ViewsMirabella AstraОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Vrana 2007Документ19 страницVrana 2007Mirabella AstraОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Epigenetics and MicroRNAs.5Документ6 страницEpigenetics and MicroRNAs.5Saurabh GayaliОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Pol 030Документ6 страницPol 030Mirabella AstraОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Genetics of Beckwith Wiedemann SyndromeДокумент8 страницGenetics of Beckwith Wiedemann SyndromeMirabella AstraОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Example 1:: Inverse Method 3x3 MatrixДокумент5 страницExample 1:: Inverse Method 3x3 MatrixMithila ArmanОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- OrthogonalДокумент124 страницыOrthogonalthuannm0426Оценок пока нет
- Kronecker Product - WikipediaДокумент10 страницKronecker Product - WikipediaFarhan SaeedОценок пока нет
- DPPДокумент711 страницDPPSanagavarapu Subrahmanyam100% (3)
- 2014 Linear Models in Matrix Form - A Hands-Jonathon D. Brown (Auth.) - Springer PDFДокумент548 страниц2014 Linear Models in Matrix Form - A Hands-Jonathon D. Brown (Auth.) - Springer PDFAnnh Acosta100% (2)
- Online High School OM013: Honors Precalculus With TrigonometryДокумент2 страницыOnline High School OM013: Honors Precalculus With TrigonometryJin SiclonОценок пока нет
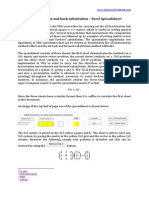
- LU Factorisation and Forward and Back Substitution - ExcelДокумент4 страницыLU Factorisation and Forward and Back Substitution - ExcelrodwellheadОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Mind Map - Matrices - Class 12Документ5 страницMind Map - Matrices - Class 12studyonlyrithuОценок пока нет
- Half Yearly Exam 2013Документ4 страницыHalf Yearly Exam 2013abhishek anandОценок пока нет
- Mat637 NotesДокумент127 страницMat637 NotesÉtienne Fiss DuPaysОценок пока нет
- FIITJEE matrices and determinants practice problemsДокумент6 страницFIITJEE matrices and determinants practice problemsSankalp JainОценок пока нет
- Gaussian EliminationДокумент22 страницыGaussian Eliminationnefoxy100% (1)
- New FormatДокумент160 страницNew FormatAdrian AlinОценок пока нет
- TN 12 STD (+2) Maths Chapter 9 Questions: I.Choose and Write The Correct Answer: (20 X 1 20)Документ4 страницыTN 12 STD (+2) Maths Chapter 9 Questions: I.Choose and Write The Correct Answer: (20 X 1 20)blue_l1Оценок пока нет
- 0.1 Practice Problems:: January 8, 2021Документ4 страницы0.1 Practice Problems:: January 8, 2021RagaviSowmyaОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Leep204 PDFДокумент21 страницаLeep204 PDFchankit vashishtОценок пока нет
- PII - Numerical Analysis II - Iserles (2005) 61pg PDFДокумент61 страницаPII - Numerical Analysis II - Iserles (2005) 61pg PDFfdsdsfsdfmgОценок пока нет
- Jay Smith - Engineers' Practical Databook (2018)Документ169 страницJay Smith - Engineers' Practical Databook (2018)Anony100% (3)
- Final PaperДокумент81 страницаFinal PaperRaj RoyОценок пока нет
- Algebra and Number Theory Exam: Part I Multiple Choice TestДокумент4 страницыAlgebra and Number Theory Exam: Part I Multiple Choice TestAnaNkineОценок пока нет
- Nonlinear Functional Analysis: Gerald TeschlДокумент66 страницNonlinear Functional Analysis: Gerald Teschlstimpy79Оценок пока нет
- FPE7e AppendicesДокумент113 страницFPE7e AppendicesJohnОценок пока нет
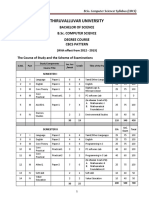
- B.sc. Computer ScienceДокумент60 страницB.sc. Computer ScienceSree SivaОценок пока нет
- S.Y.B.SC (I.T) Applied Mathematics: Semester - Iii (CBCS)Документ271 страницаS.Y.B.SC (I.T) Applied Mathematics: Semester - Iii (CBCS)Monisha MudaliarОценок пока нет
- Mathmedics For 12th Standard - All Formulas and Respective Chapter QuestionsДокумент127 страницMathmedics For 12th Standard - All Formulas and Respective Chapter QuestionsDiiveshОценок пока нет
- SVD: A Geometric View of the Singular Value DecompositionДокумент8 страницSVD: A Geometric View of the Singular Value DecompositionJaime Andres Aranguren CardonaОценок пока нет
- Hausman 1983Документ58 страницHausman 1983vndra17Оценок пока нет
- Yearly Lesson Plan Maths Form 5 2011Документ23 страницыYearly Lesson Plan Maths Form 5 2011Ayu Ali100% (3)
- Theory of Financial Decision Making IngersollДокумент390 страницTheory of Financial Decision Making IngersollJorge Bejarano100% (1)
- Waziri PDFДокумент15 страницWaziri PDFImportadora Boliviana de MedicamentosОценок пока нет