Вам также может понравиться
- Installation Manual: FX - 232-BDДокумент1 страницаInstallation Manual: FX - 232-BDlue-ookОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Dell Latitude E6440 Spec SheetДокумент2 страницыDell Latitude E6440 Spec Sheetlue-ookОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Sensor Collection: Electronic Device Industry EditionДокумент12 страницSensor Collection: Electronic Device Industry Editionlue-ookОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- VBAI TutorialДокумент99 страницVBAI Tutoriallue-ookОценок пока нет
- Voltage Transducer LV 25-600 600 VДокумент3 страницыVoltage Transducer LV 25-600 600 Vlue-ookОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- FPGA Vision Using The NI LabVIEWДокумент2 страницыFPGA Vision Using The NI LabVIEWlue-ookОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Rogowski CoilsДокумент7 страницRogowski Coilslue-ookОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A-Series HW User ManualДокумент85 страницA-Series HW User Manuallue-ookОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- uIBX 210 CV N2600 - 0421 - WebДокумент1 страницаuIBX 210 CV N2600 - 0421 - Weblue-ookОценок пока нет
- Process Automation Festo Product OverviewДокумент20 страницProcess Automation Festo Product Overviewlue-ookОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Festo Process Control - CatalogДокумент3 страницыFesto Process Control - Cataloglue-ookОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Qmotion GuideДокумент36 страницQmotion Guidelue-ookОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Projects in Contemporary OrganizationsДокумент24 страницыProjects in Contemporary Organizationslue-ookОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Introduction To Vision - NIДокумент36 страницIntroduction To Vision - NIlue-ookОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Network Termination Unit STU4: Suppor Ting SHDSL - BisДокумент2 страницыNetwork Termination Unit STU4: Suppor Ting SHDSL - BisНатальяОценок пока нет
- One-Line Diagram - OLV1 (Short-Circuit Analysis)Документ20 страницOne-Line Diagram - OLV1 (Short-Circuit Analysis)Yogesh MittalОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- IMS ManualДокумент66 страницIMS Manualghafoorian_khoshgovar1488Оценок пока нет
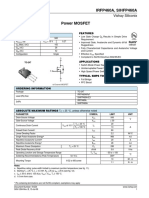
- Vishay IRFP460APBF Datasheet PDFДокумент8 страницVishay IRFP460APBF Datasheet PDFkamel keddarОценок пока нет
- Service Manual: LCD TVДокумент73 страницыService Manual: LCD TVJose Luis Medina CastañedaОценок пока нет
- Computer Networks: Transmission Impairments and Network PerformanceДокумент19 страницComputer Networks: Transmission Impairments and Network PerformancePrakhar PathakОценок пока нет
- TD 012019 enДокумент24 страницыTD 012019 enMikami TeruОценок пока нет
- Mgiter-Navsari Electrical Engineering Department Lesson PlanningДокумент3 страницыMgiter-Navsari Electrical Engineering Department Lesson PlanningJAY S TANDELОценок пока нет
- GFN Cired PaperДокумент8 страницGFN Cired PaperSukant BhattacharyaОценок пока нет
- Eng - PLC HXMU-0014Документ116 страницEng - PLC HXMU-0014Muhammad Januar SusantoОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Design and Fabrication ofДокумент9 страницDesign and Fabrication ofKarthi Keyan R KОценок пока нет
- Ustares Research 2Документ15 страницUstares Research 2Zachary Yassir GonzalezОценок пока нет
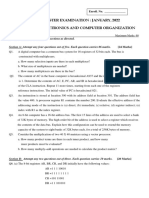
- End Semester Examination: January, 2022 Digital Electronics and Computer OrganizationДокумент3 страницыEnd Semester Examination: January, 2022 Digital Electronics and Computer OrganizationFFFОценок пока нет
- R-L-C Circuit Analysis: ProcedureДокумент2 страницыR-L-C Circuit Analysis: ProcedureAbhyuday ChauhanОценок пока нет
- IRC5Документ549 страницIRC5HugoRamosОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- DIY EEG and ECG Circuit PDFДокумент10 страницDIY EEG and ECG Circuit PDFfernandovaras2005Оценок пока нет
- Unit I CoaДокумент59 страницUnit I CoaRajitha ReddyОценок пока нет
- SEMIKRON DataSheet SKiiP 3614 GB17E4 6DPVLR 20602302Документ7 страницSEMIKRON DataSheet SKiiP 3614 GB17E4 6DPVLR 20602302faradaiОценок пока нет
- EPEVER Datasheet Tracer An (10A 4OA)Документ2 страницыEPEVER Datasheet Tracer An (10A 4OA)Amien HajaОценок пока нет
- ELTE2.3 DBS3900 LTE TDD Basic Feature DescriptionДокумент92 страницыELTE2.3 DBS3900 LTE TDD Basic Feature DescriptioneuniceikaОценок пока нет
- LG Pdrycb000Документ10 страницLG Pdrycb000milanОценок пока нет
- Casing Collar LocatorДокумент1 страницаCasing Collar LocatorArturo ArgaezОценок пока нет
- Obscura Delay Manual PDFДокумент17 страницObscura Delay Manual PDFWarwickDannyОценок пока нет
- Buchholz Relay HistoryДокумент7 страницBuchholz Relay Historyjulio cesar silvaОценок пока нет
- York Chiller Air CooledДокумент108 страницYork Chiller Air CooledaxelОценок пока нет
- DBXLH 6565a VTMДокумент4 страницыDBXLH 6565a VTMcarlosconstructor1Оценок пока нет
- Build The Class AB Push Pull Amplifier.: Report OnДокумент19 страницBuild The Class AB Push Pull Amplifier.: Report Onreal print100% (1)
- Powervar-PerkinElmer North American UPS Matrix Ver#13-01i Rev AДокумент8 страницPowervar-PerkinElmer North American UPS Matrix Ver#13-01i Rev AWladimir TierraОценок пока нет
- Application Notes: Application Notes P14X/En Ap/B54 Micom P141, P142, P143Документ178 страницApplication Notes: Application Notes P14X/En Ap/B54 Micom P141, P142, P143Dũng Đinh TiếnОценок пока нет
- Process Control Engineering: Prof. Mahmoud A. El-Rifai Prof. Reem S. EttouneyДокумент37 страницProcess Control Engineering: Prof. Mahmoud A. El-Rifai Prof. Reem S. EttouneyCupa no DensetsuОценок пока нет
- Algorithms to Live By: The Computer Science of Human DecisionsОт EverandAlgorithms to Live By: The Computer Science of Human DecisionsРейтинг: 4.5 из 5 звезд4.5/5 (722)