Вам также может понравиться
- Planar Linkage Synthesis: A modern CAD based approachОт EverandPlanar Linkage Synthesis: A modern CAD based approachОценок пока нет
- Recti Lin It AteДокумент45 страницRecti Lin It AteBikash Chandra SahooОценок пока нет
- The Accuracy of Angle EncodersДокумент9 страницThe Accuracy of Angle EncodersatulОценок пока нет
- Plate 6Документ8 страницPlate 6Sleepy SpettoОценок пока нет
- Leica Absolute Tracker AT401 White Paper enДокумент16 страницLeica Absolute Tracker AT401 White Paper enGeorge AcostaОценок пока нет
- OptimizedMulti elementLensDesignДокумент10 страницOptimizedMulti elementLensDesignffb.boy.30Оценок пока нет
- Geometric Camera CalibrationДокумент12 страницGeometric Camera CalibrationomarОценок пока нет
- Asphere Metrology: Options For Measuring Aspheric LensesДокумент11 страницAsphere Metrology: Options For Measuring Aspheric LensesWОценок пока нет
- METROLOGYДокумент11 страницMETROLOGYarvan singhОценок пока нет
- ME250 Straightness Measurement using AutocollimatorДокумент10 страницME250 Straightness Measurement using AutocollimatorpradabkОценок пока нет
- 3-D Measurements On PistonsДокумент4 страницы3-D Measurements On PistonsRajaSekarsajjaОценок пока нет
- Laser Alignment ProcedureДокумент10 страницLaser Alignment ProcedureIlkuОценок пока нет
- AN296127 Advanced On Chip Linearization in The A1335 Angle Sensor ICДокумент12 страницAN296127 Advanced On Chip Linearization in The A1335 Angle Sensor ICPaulo ShikoyОценок пока нет
- ASME B89.4.19 Performance Evaluation Tests and Geometric Misalignments in Laser Trackers VolumeДокумент15 страницASME B89.4.19 Performance Evaluation Tests and Geometric Misalignments in Laser Trackers VolumeJDОценок пока нет
- Laser Tracker AlignmentДокумент12 страницLaser Tracker Alignment1446590tОценок пока нет
- SSM Iii 06Документ9 страницSSM Iii 06Nisreen ArabiyatОценок пока нет
- Autocollimator: Product Range and SpecificationДокумент10 страницAutocollimator: Product Range and SpecificationLokesh LokiОценок пока нет
- Ivs2006 2Документ8 страницIvs2006 2Ricardo RomeroОценок пока нет
- Zeiss Ultra OptimeterДокумент3 страницыZeiss Ultra OptimeterShyam SenthilОценок пока нет
- SPIE 6422-32 Risley Prisms ToralesДокумент8 страницSPIE 6422-32 Risley Prisms ToralesnorbdudeОценок пока нет
- Metrology Measurement Unit-5Документ27 страницMetrology Measurement Unit-5R NAVEEN KUMAR MECHОценок пока нет
- Design and Experimentation of A Roundness TesterДокумент47 страницDesign and Experimentation of A Roundness Testerkndprasad01Оценок пока нет
- Laser Tracker 2Документ12 страницLaser Tracker 2Lohith AnjaanОценок пока нет
- Turbine Alignment: How The Alignment System Works - L-705 and L-706 LasersДокумент8 страницTurbine Alignment: How The Alignment System Works - L-705 and L-706 LasersSelvinОценок пока нет
- Autocollimator ProjectДокумент11 страницAutocollimator ProjectAryan VigneshОценок пока нет
- Simultaneous Self-Calibration of NonorthogonalityДокумент8 страницSimultaneous Self-Calibration of NonorthogonalityaliramezanidehajОценок пока нет
- Comparators: Prof P P SuryawanshiДокумент26 страницComparators: Prof P P SuryawanshiNihar ApteОценок пока нет
- Encoder (Lab 2 )Документ15 страницEncoder (Lab 2 )brasengan6Оценок пока нет
- Engineering20100600001 82857529 PDFДокумент5 страницEngineering20100600001 82857529 PDFshailendrabachalОценок пока нет
- Delta Robot ThesisДокумент5 страницDelta Robot Thesisgj9vq5z0100% (2)
- Real-time Tracking and Pose Estimation for Industrial Objects using Geometric FeaturesДокумент6 страницReal-time Tracking and Pose Estimation for Industrial Objects using Geometric FeaturesHaydee Tu Ya SabesОценок пока нет
- Sensors: Precise 3D Lug Pose Detection Sensor For Automatic Robot Welding Using A Structured-Light Vision SystemДокумент16 страницSensors: Precise 3D Lug Pose Detection Sensor For Automatic Robot Welding Using A Structured-Light Vision SystemMihail AvramovОценок пока нет
- Straightness Measurement Using AutocollimatorДокумент5 страницStraightness Measurement Using Autocollimatorविशाल पुडासैनीОценок пока нет
- An 1007 EstimatingVelocityAndPositionUsingAccelerometersДокумент8 страницAn 1007 EstimatingVelocityAndPositionUsingAccelerometersAnderson OliveiraОценок пока нет
- CVI Optical SpecificationsДокумент8 страницCVI Optical SpecificationsAmir MolazecirovicОценок пока нет
- ComparatorДокумент20 страницComparatorprakaashtОценок пока нет
- Position and Velocity Measurement by Optical Shaft EncodersДокумент31 страницаPosition and Velocity Measurement by Optical Shaft EncodersVinit PatelОценок пока нет
- Specifying and Measuring Slope Error of Optical SurfaceДокумент3 страницыSpecifying and Measuring Slope Error of Optical SurfacenitsilcharassamОценок пока нет
- Implementing A Tilt-Compensated Ecompass Using Accelerometer and Magnetometer SensorsДокумент22 страницыImplementing A Tilt-Compensated Ecompass Using Accelerometer and Magnetometer SensorsRaihan1496Оценок пока нет
- Koordinat FotoДокумент22 страницыKoordinat FotoLarasaty AyuОценок пока нет
- Guidelines for optimizing cogwheel design for back-bias speed sensorsДокумент8 страницGuidelines for optimizing cogwheel design for back-bias speed sensorsJefersonОценок пока нет
- Auto-Collimator: by Vamsi Krishna MajetiДокумент12 страницAuto-Collimator: by Vamsi Krishna MajetiBhuban LimbuОценок пока нет
- Profile ProjectorДокумент25 страницProfile Projectorrummanomar0% (2)
- Auto Collimator SДокумент7 страницAuto Collimator SRamanjooloo DeelanОценок пока нет
- Unit - V FinalДокумент20 страницUnit - V FinalSantosh SantuОценок пока нет
- Effects of MisalignmentДокумент50 страницEffects of MisalignmentRana RandhirОценок пока нет
- 2009 - SCI - Correction of Field Distortion of Laser Marking Systems Using Surface Compensation FunctionДокумент6 страниц2009 - SCI - Correction of Field Distortion of Laser Marking Systems Using Surface Compensation FunctionozguraliОценок пока нет
- Astm E2491-06Документ13 страницAstm E2491-06Andi DaudОценок пока нет
- Using Auto Collimator Aim:: FormulaeДокумент4 страницыUsing Auto Collimator Aim:: FormulaejeroldscdОценок пока нет
- Profile Projector 10052016Документ24 страницыProfile Projector 10052016S MurthyОценок пока нет
- A Method For Evaluating Spindle Rotation Errors of Machine Tools Using A Laser InterferometerДокумент12 страницA Method For Evaluating Spindle Rotation Errors of Machine Tools Using A Laser Interferometerganesh03872368Оценок пока нет
- Auto CollimatorДокумент12 страницAuto CollimatorGopinathОценок пока нет
- Profile Projector Inspection GuideДокумент25 страницProfile Projector Inspection GuideMuhammad FarhanОценок пока нет
- Multi 20 SensorДокумент9 страницMulti 20 SensorMemory KambaОценок пока нет
- Metrology and Quality Control Course Comparators GuideДокумент78 страницMetrology and Quality Control Course Comparators GuidePranav karnОценок пока нет
- Motorised Screw JackДокумент4 страницыMotorised Screw JackhidaiОценок пока нет
- IHA6012Документ1 страницаIHA6012Julián DuránОценок пока нет
- SurphExpress Manual v2 55d2 03Документ125 страницSurphExpress Manual v2 55d2 03Julián Durán0% (1)
- Version Name Surphaser Description Line Previous Line TextДокумент4 страницыVersion Name Surphaser Description Line Previous Line TextJulián DuránОценок пока нет
- Geomagic Design X Update LogДокумент28 страницGeomagic Design X Update LogJulián DuránОценок пока нет
- HMI Red Lion 70030384Документ8 страницHMI Red Lion 70030384jduran26Оценок пока нет
- Get Started With Dropbox PDFДокумент10 страницGet Started With Dropbox PDFJulián DuránОценок пока нет
- GL1280 Brochure eДокумент4 страницыGL1280 Brochure eJulián DuránОценок пока нет
- TechSheet - Laser Scanner Focus3DДокумент4 страницыTechSheet - Laser Scanner Focus3DJulián DuránОценок пока нет
- Manual PSR 175Документ64 страницыManual PSR 175Julián DuránОценок пока нет
- Culvert DesignДокумент18 страницCulvert Designseagull700% (1)
- Appendix G - Soldier Pile and Lagging Wall DesignДокумент10 страницAppendix G - Soldier Pile and Lagging Wall Designbusta299Оценок пока нет
- Numerical Solution of Seepage Problem of Groundwater FlowДокумент5 страницNumerical Solution of Seepage Problem of Groundwater FlowIOSRjournalОценок пока нет
- 50 Years of The Turbidite Paradigm (Shanmugam, 2000)Документ58 страниц50 Years of The Turbidite Paradigm (Shanmugam, 2000)hilman_satriaОценок пока нет
- Separation and Purification of Triacylglycerols From Nyamplung (Calophyllum Inophyllum) Oil by Batchwise Solvent ExtractionДокумент24 страницыSeparation and Purification of Triacylglycerols From Nyamplung (Calophyllum Inophyllum) Oil by Batchwise Solvent ExtractionAfifatul JannahОценок пока нет
- CO2-Reducing Cement Based On Calcium SilicatesДокумент9 страницCO2-Reducing Cement Based On Calcium Silicatesyinglv100% (1)
- Carrfoster 2Документ5 страницCarrfoster 2SauravОценок пока нет
- Math II Tutorial 1Документ2 страницыMath II Tutorial 1devang_siОценок пока нет
- Joint Design For Reinforced Concrete Buildings: P Ei ErДокумент79 страницJoint Design For Reinforced Concrete Buildings: P Ei ErSergey MatyuninОценок пока нет
- Pseudocode for determining minimum launch angle to clear an obstacleДокумент8 страницPseudocode for determining minimum launch angle to clear an obstacleChristian BatayenОценок пока нет
- Properties of CompoundsДокумент15 страницProperties of CompoundsPrasad YarraОценок пока нет
- Especificacion SHY73MC4 UДокумент3 страницыEspecificacion SHY73MC4 UYgor Salgado100% (3)
- Mock C4 Paper Key ConceptsДокумент4 страницыMock C4 Paper Key ConceptsWojtek BażantОценок пока нет
- Iisus A Fost Crucificat La Constantinopole Si Nu La Ierusalim - Partea IVДокумент65 страницIisus A Fost Crucificat La Constantinopole Si Nu La Ierusalim - Partea IVsando khanОценок пока нет
- 06 Slewing PDFДокумент14 страниц06 Slewing PDFJuan Alberto Giglio FernándezОценок пока нет
- Column Design PDFДокумент2 страницыColumn Design PDFRobin0% (1)
- Balloon and Travoltage AnswersДокумент4 страницыBalloon and Travoltage Answersosama47% (17)
- Cem - Part 1 PDFДокумент19 страницCem - Part 1 PDFDavin OtogleОценок пока нет
- Filter Programs MatlabДокумент8 страницFilter Programs MatlabPreethi Sj100% (1)
- Experiment #2: Continuous-Time Signal Representation I. ObjectivesДокумент14 страницExperiment #2: Continuous-Time Signal Representation I. ObjectivesMarvin AtienzaОценок пока нет
- Static Studies of Magneto-Electro-Elastic 3-D Beam Using ANSYS - FINALДокумент8 страницStatic Studies of Magneto-Electro-Elastic 3-D Beam Using ANSYS - FINALjssrikantamurthyОценок пока нет
- Atomic TheoryДокумент2 страницыAtomic TheorybabeОценок пока нет
- C680Документ22 страницыC680dinhtung2210100% (2)
- Clarke and Park TransfomationДокумент9 страницClarke and Park TransfomationGREATJUSTGREATОценок пока нет
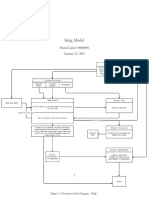
- Ising ModelДокумент5 страницIsing Modeldecerto252Оценок пока нет
- Working of Steam Turbines and Its AuxillariesДокумент48 страницWorking of Steam Turbines and Its AuxillariesbalajigandhirajanОценок пока нет
- HW1Документ2 страницыHW1Jimmy LauОценок пока нет
- Astm D 1746 97 TH 2002 PDFДокумент5 страницAstm D 1746 97 TH 2002 PDFJed BrionesОценок пока нет
- (Architecture Ebook) Alvar Aalto, Alvar Aalto and The Bio-ArchitectureДокумент5 страниц(Architecture Ebook) Alvar Aalto, Alvar Aalto and The Bio-Architecturepooh86poohОценок пока нет