Вам также может понравиться
- Reliability and AvailablityДокумент6 страницReliability and AvailablityFIRDAUS BIN MAHAMADОценок пока нет
- LTspice - Worst-Case Circuit AnalysisДокумент7 страницLTspice - Worst-Case Circuit Analysiscastor2010Оценок пока нет
- Three Term ControlДокумент7 страницThree Term ControlcataiceОценок пока нет
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningОт EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningОценок пока нет
- Control System - Position Control SystemДокумент4 страницыControl System - Position Control SystemAnas Elgaud100% (1)
- Multiple Controllers For Boost Converters Under Large Load Range: A GA and Fuzzy Logic Based ApproachДокумент6 страницMultiple Controllers For Boost Converters Under Large Load Range: A GA and Fuzzy Logic Based ApproachDaltonVidorОценок пока нет
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОт EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОценок пока нет
- Automated Control Resumen Unidd IVДокумент23 страницыAutomated Control Resumen Unidd IVRakgnar LodbrokОценок пока нет
- Adaptive Filter: Enhancing Computer Vision Through Adaptive FilteringОт EverandAdaptive Filter: Enhancing Computer Vision Through Adaptive FilteringОценок пока нет
- Cs Project Report: Comparative Analysis of P, I, D, PI, PD, PID On Speed Control of DC Motor Using MATLAB SimulinkДокумент25 страницCs Project Report: Comparative Analysis of P, I, D, PI, PD, PID On Speed Control of DC Motor Using MATLAB Simulink2K19/EE/259 TUSHARОценок пока нет
- PID Controllers: System Dynamics and ControlДокумент33 страницыPID Controllers: System Dynamics and ControlRuturaj BadalОценок пока нет
- N Modular RedundancyДокумент15 страницN Modular RedundancyShambhu KhanalОценок пока нет
- Mechanical Vibration Lab ReportДокумент7 страницMechanical Vibration Lab ReportChris NichollsОценок пока нет
- Simulation in Terminated SystemsДокумент17 страницSimulation in Terminated SystemsSaleem AlmaqashiОценок пока нет
- Monte Carlo - Simulation - Using - Excel - For - PredictingДокумент6 страницMonte Carlo - Simulation - Using - Excel - For - PredictingaleОценок пока нет
- IAM Proportional Integral Derivative PID ControlsДокумент13 страницIAM Proportional Integral Derivative PID ControlsIndustrial Automation and MechatronicsОценок пока нет
- 05 Diagnostic Test of CLRM 2Документ39 страниц05 Diagnostic Test of CLRM 2Inge AngeliaОценок пока нет
- Uncertainty Evaluation For The Composite Error of Energy Meter and Instrument TransformerДокумент4 страницыUncertainty Evaluation For The Composite Error of Energy Meter and Instrument Transformerjoydeep_d3232Оценок пока нет
- 4150 Lab 3Документ6 страниц4150 Lab 3Tan Nguyen VanОценок пока нет
- Matlab, Simulink - Control Systems Simulation Using Matlab and SimulinkДокумент10 страницMatlab, Simulink - Control Systems Simulation Using Matlab and SimulinkTarkes DoraОценок пока нет
- W9 ReliabilityДокумент72 страницыW9 ReliabilitygigiОценок пока нет
- Generating Random NumbersДокумент32 страницыGenerating Random NumbersEman ShahidОценок пока нет
- Digital PID Controllers: Different Forms of PIDДокумент11 страницDigital PID Controllers: Different Forms of PIDสหายดิว ลูกพระอาทิตย์Оценок пока нет
- Lab 06Документ7 страницLab 06Andy MeyerОценок пока нет
- Expt 4 First Order SystemДокумент4 страницыExpt 4 First Order SystemAngelo Legarda De CastroОценок пока нет
- Proportional Integral Derivative PID ControlsДокумент13 страницProportional Integral Derivative PID Controlsapi-376515075% (4)
- Hybrid Modeling and Control of A Hydroelectric Power PlantДокумент6 страницHybrid Modeling and Control of A Hydroelectric Power PlantUrvish PatelОценок пока нет
- 7 Variance Reduction Techniques: 7.1 Common Random NumbersДокумент5 страниц7 Variance Reduction Techniques: 7.1 Common Random NumbersjarameliОценок пока нет
- Plant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorДокумент39 страницPlant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorMani Kumar ReddyОценок пока нет
- 2-Linear Regression and Correlation in R Commander-CVДокумент2 страницы2-Linear Regression and Correlation in R Commander-CVMontse JenkinsОценок пока нет
- A Practical Predictive Control Algorithm For A Large Class of ProcessesДокумент5 страницA Practical Predictive Control Algorithm For A Large Class of ProcessesCatalin PirlogОценок пока нет
- Introduction: PID Controller Design: SystemДокумент14 страницIntroduction: PID Controller Design: SystemRantharu AttanayakeОценок пока нет
- PID Tutorial: Step Cloop RedДокумент8 страницPID Tutorial: Step Cloop RedTran SangОценок пока нет
- A PI Controller Based On Gain-Scheduling For Synchronous GeneratorДокумент11 страницA PI Controller Based On Gain-Scheduling For Synchronous GeneratoratirinaОценок пока нет
- Experiment No. 5 Study of The Effect of A Forward-Path Lead Compensator On The Performance of A Linear Feedback Control SystemДокумент3 страницыExperiment No. 5 Study of The Effect of A Forward-Path Lead Compensator On The Performance of A Linear Feedback Control SystemSubhaОценок пока нет
- Motor Modeling and Position Control Lab Week 3: Closed Loop ControlДокумент14 страницMotor Modeling and Position Control Lab Week 3: Closed Loop ControlJanett TrujilloОценок пока нет
- A Sliding Mode-Multimodel Control For A Sensorless Pumping SystemДокумент6 страницA Sliding Mode-Multimodel Control For A Sensorless Pumping SystemKatherine DukeОценок пока нет
- Introduction To Algorithm Analysis and DesignДокумент18 страницIntroduction To Algorithm Analysis and DesignArya ChinnuОценок пока нет
- Stable Adaptive Reconfigurable Flight Control With Self-DiagnosticsДокумент6 страницStable Adaptive Reconfigurable Flight Control With Self-DiagnosticsAnirudh IndanaОценок пока нет
- EEA126 - Module 2 - SWsДокумент12 страницEEA126 - Module 2 - SWsGabriel Carl Alpuerto100% (1)
- The Design of Feedback Control SystemsДокумент36 страницThe Design of Feedback Control SystemsNirmal Kumar PandeyОценок пока нет
- Types of SimulationДокумент7 страницTypes of SimulationMani KandanОценок пока нет
- Design of The Deadbeat Controller With Limited Output: L. Balasevicius, G. DervinisДокумент4 страницыDesign of The Deadbeat Controller With Limited Output: L. Balasevicius, G. DervinismailmadoОценок пока нет
- A Monte Carlo Simulation Method For System Reliability PDFДокумент9 страницA Monte Carlo Simulation Method For System Reliability PDFNaresh NarineОценок пока нет
- Design of UpsamplerДокумент7 страницDesign of Upsamplerprasu440Оценок пока нет
- PID Tutorial: Step Cloop RedДокумент8 страницPID Tutorial: Step Cloop RedmohammedОценок пока нет
- M/M/1 and M/M/M Queueing Systems: 1. Preliminaries 1.1 Kendall's Notation: G/G/N/K QueueДокумент12 страницM/M/1 and M/M/M Queueing Systems: 1. Preliminaries 1.1 Kendall's Notation: G/G/N/K QueueBinesh JoseОценок пока нет
- Stata Lab4 2023Документ36 страницStata Lab4 2023Aadhav JayarajОценок пока нет
- S S TF: 3. Controller Design CalculationsДокумент6 страницS S TF: 3. Controller Design CalculationsJoy MatiwaneОценок пока нет
- Chapter 10 PID 1Документ36 страницChapter 10 PID 1Taufiq GalangОценок пока нет
- Introduction To PIDДокумент16 страницIntroduction To PIDjocianvefОценок пока нет
- Exercises For Practical DSGE Modelling: Alina Barnett Martin EllisonДокумент36 страницExercises For Practical DSGE Modelling: Alina Barnett Martin Ellisonengli abdelОценок пока нет
- 8 EE5 CBPS LabДокумент68 страниц8 EE5 CBPS Labkuldeep singh50% (2)
- Note - 13 - Intro To Digital Control SystemДокумент7 страницNote - 13 - Intro To Digital Control SystemVimal Raj DОценок пока нет
- Performance CriterionДокумент28 страницPerformance CriterionAbd Al Kareem AzoozОценок пока нет
- CCC3 CH 1 SV 1Документ52 страницыCCC3 CH 1 SV 1ngyncloudОценок пока нет
- Simulation Models S AsДокумент7 страницSimulation Models S AsngyncloudОценок пока нет
- Pandas Cheat SheetДокумент2 страницыPandas Cheat Sheetngyncloud100% (4)
- CC2 CH 6 TVДокумент122 страницыCC2 CH 6 TVngyncloud100% (2)
- STAT 700 Homework 5Документ10 страницSTAT 700 Homework 5ngyncloudОценок пока нет
- Sas Simple Regression 2010Документ8 страницSas Simple Regression 2010ngyncloudОценок пока нет
- 580 Report TemplateДокумент2 страницы580 Report TemplatengyncloudОценок пока нет
- Precalc Warm Ups9Документ3 страницыPrecalc Warm Ups9ngyncloudОценок пока нет
- Sequences On The Ti 89Документ5 страницSequences On The Ti 89ngyncloudОценок пока нет
- Save Columns: Prediction FormulaДокумент3 страницыSave Columns: Prediction FormulangyncloudОценок пока нет
- Assembly LanguageДокумент2 страницыAssembly LanguagengyncloudОценок пока нет
- Conics Notes Part 12Документ14 страницConics Notes Part 12ngyncloudОценок пока нет
- Stilo Servo Electric PDFДокумент7 страницStilo Servo Electric PDFManu Alex100% (1)
- WSDL Reading, A Beginner's GuideДокумент18 страницWSDL Reading, A Beginner's GuidePVParameswaranОценок пока нет
- Mba Time Table Updated On 1st Nov 2021Документ4 страницыMba Time Table Updated On 1st Nov 2021KNRavi KiranОценок пока нет
- CemeraДокумент84 страницыCemerashyam prakash sharmaОценок пока нет
- Ieee Surg Arrestor .0) enДокумент9 страницIeee Surg Arrestor .0) enAjmed AliОценок пока нет
- IPL RevalidaДокумент55 страницIPL RevalidaAto TejaОценок пока нет
- Microprocessors and InterfacingДокумент125 страницMicroprocessors and InterfacingRaja SekharОценок пока нет
- Dbms ManualДокумент144 страницыDbms ManualER Jagdeep GurjarОценок пока нет
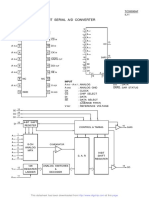
- C-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DOДокумент1 страницаC-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DOAsep TatangОценок пока нет
- EngineeringДокумент113 страницEngineeringGlass-Half-EmptyОценок пока нет
- Batch Process in SAP Net Weaver GatewayДокумент12 страницBatch Process in SAP Net Weaver GatewayArun Varshney (MULAYAM)Оценок пока нет
- Ds ESPRIMO E720 E85Документ9 страницDs ESPRIMO E720 E85Miljan C.Оценок пока нет
- Inv 27113Документ2 страницыInv 27113joakim KiambaОценок пока нет
- NCPDP Pharmacy Drug ClaimsДокумент8 страницNCPDP Pharmacy Drug ClaimskallepalliОценок пока нет
- HRB754Документ2 страницыHRB754عبدالله رحيمОценок пока нет
- AN5116-02 Technical ManualДокумент72 страницыAN5116-02 Technical ManualValdinei Quaresma0% (1)
- Romney Ais14 CH 16 General Ledger and Reporting SystemДокумент11 страницRomney Ais14 CH 16 General Ledger and Reporting SystemHabteweld EdluОценок пока нет
- Service Manual: ChassisДокумент66 страницService Manual: ChassisAsnake TegenawОценок пока нет
- CCpilot XM and CrossCore XM - Programmers GuideДокумент17 страницCCpilot XM and CrossCore XM - Programmers GuideAndres Emilio Veloso RamirezОценок пока нет
- Decimal To Artnet Conversion TableДокумент2 страницыDecimal To Artnet Conversion Tablejray1982Оценок пока нет
- Group 4: Prachi Agarwal, Kriti Sharan, Sumit Naugraiya, Sumit Puri, Vishnu Sharma & Govind DagaДокумент53 страницыGroup 4: Prachi Agarwal, Kriti Sharan, Sumit Naugraiya, Sumit Puri, Vishnu Sharma & Govind DagakritisharanОценок пока нет
- E Ms-50g Fx-List v2.0Документ9 страницE Ms-50g Fx-List v2.0MiniEscortОценок пока нет
- WebVIewer BrochureДокумент2 страницыWebVIewer BrochureCarlos GómezОценок пока нет
- VFD Manual PDFДокумент60 страницVFD Manual PDFray1coОценок пока нет
- DD Vstor40 LP x64 ptbUI2C3AДокумент6 страницDD Vstor40 LP x64 ptbUI2C3AwilsonnascОценок пока нет
- 161-Gyro IXblue Quadrans User Manual 1-10-2014Документ31 страница161-Gyro IXblue Quadrans User Manual 1-10-2014Jean-Guy PaulОценок пока нет
- 2019 MUSE Conference - Educational Presentations - Rev May 2 2019Документ81 страница2019 MUSE Conference - Educational Presentations - Rev May 2 2019Michele LambertОценок пока нет
- EAS6800+ High Quality Composite Video Encoder/Synchronizer and Analog Audio DemultiplexerДокумент90 страницEAS6800+ High Quality Composite Video Encoder/Synchronizer and Analog Audio DemultiplexerTechne PhobosОценок пока нет
- NAP Form 10 PDFДокумент2 страницыNAP Form 10 PDFjoseph judahОценок пока нет