Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Shop Manual PC78MR-6-SEBM030601 PDFДокумент592 страницыShop Manual PC78MR-6-SEBM030601 PDFBudi Waskito95% (20)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Deep Excavation KLCCДокумент20 страницDeep Excavation KLCCamirriyyah100% (1)
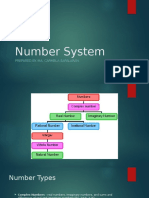
- Number System: Prepared By. Ma. Carmela SapalaranДокумент9 страницNumber System: Prepared By. Ma. Carmela SapalaranCarmela SapalaranОценок пока нет
- Ece131l Exp8Документ4 страницыEce131l Exp8Carmela SapalaranОценок пока нет
- ECE125 - A11 Marte, Christopher Lemel Sapalaran, Ma. Carmela P. Torres, JeromeДокумент5 страницECE125 - A11 Marte, Christopher Lemel Sapalaran, Ma. Carmela P. Torres, JeromeCarmela SapalaranОценок пока нет
- Ece131l Exp6Документ4 страницыEce131l Exp6Carmela SapalaranОценок пока нет
- Pole Data My VersionДокумент18 страницPole Data My VersionCarmela SapalaranОценок пока нет
- Ece131l Exp2Документ5 страницEce131l Exp2Carmela SapalaranОценок пока нет
- StorageДокумент9 страницStorageCarmela SapalaranОценок пока нет
- Ece131l Exp7Документ4 страницыEce131l Exp7Carmela SapalaranОценок пока нет
- Ece131l Exp3Документ4 страницыEce131l Exp3Carmela SapalaranОценок пока нет
- COMM3LAB Interpretation of Result1Документ4 страницыCOMM3LAB Interpretation of Result1Carmela SapalaranОценок пока нет
- Sapalaran Experiment 8Документ20 страницSapalaran Experiment 8Carmela SapalaranОценок пока нет
- Analysis of Dat2Документ3 страницыAnalysis of Dat2Carmela SapalaranОценок пока нет
- Sapalaran Experiment 11Документ8 страницSapalaran Experiment 11Carmela SapalaranОценок пока нет
- Report DSPДокумент2 страницыReport DSPCarmela SapalaranОценок пока нет
- Electronics Laboratory 3: Voltage FollowerДокумент20 страницElectronics Laboratory 3: Voltage FollowerCarmela SapalaranОценок пока нет
- MAS 2 Quiz 3Документ4 страницыMAS 2 Quiz 3Carmela SapalaranОценок пока нет
- Discussion 1Документ1 страницаDiscussion 1Carmela SapalaranОценок пока нет
- Chapter 12, Solution 1. (A) If VabДокумент59 страницChapter 12, Solution 1. (A) If VabTextos de IngenieriaОценок пока нет
- 5528 PDFДокумент33 страницы5528 PDFPham The TuОценок пока нет
- CNC Macine Dimesions-ModelДокумент1 страницаCNC Macine Dimesions-ModelNaveen PrabhuОценок пока нет
- Architect Laurie BakerДокумент116 страницArchitect Laurie BakerSuvarna456100% (5)
- Vehicle Air ConditioningДокумент32 страницыVehicle Air ConditioningAkshay Chandel100% (2)
- The Masterbuilder - July 2013 - Concrete SpecialДокумент286 страницThe Masterbuilder - July 2013 - Concrete SpecialChaitanya Raj GoyalОценок пока нет
- USFDAДокумент59 страницUSFDADontYou KnowMeОценок пока нет
- PM Question BankДокумент4 страницыPM Question BankVinay WagaralkarОценок пока нет
- An5200 Eogas AbatorДокумент3 страницыAn5200 Eogas AbatorDinhtrung TruongОценок пока нет
- (Free Scores - Com) - Di Capua Eduardo o Sole Mio 22271 PDFДокумент3 страницы(Free Scores - Com) - Di Capua Eduardo o Sole Mio 22271 PDFSeulki HongОценок пока нет
- Lit1302e Termseries Datasheet v4Документ20 страницLit1302e Termseries Datasheet v4alltheloveintheworldОценок пока нет
- Prgframe Without OpДокумент63 страницыPrgframe Without Opnitin100% (1)
- 12jun27 FC Perfect Stores Add Zing To HUL's Sales Growth - tcm114 289918 PDFДокумент1 страница12jun27 FC Perfect Stores Add Zing To HUL's Sales Growth - tcm114 289918 PDFSantosh SinghОценок пока нет
- ESE 568: Mixed Signal Design and Modeling Lecture Outline: Simplified For Hand AnalysisДокумент13 страницESE 568: Mixed Signal Design and Modeling Lecture Outline: Simplified For Hand AnalysisVarun SinghalОценок пока нет
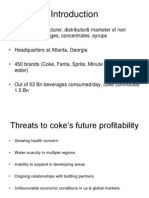
- Coca ColaДокумент12 страницCoca ColaNishtha JainОценок пока нет
- Panchal - Seismic Behaviour of Isolated Fluid Storage Tanks - A-state-Of-The-Art ReviewДокумент8 страницPanchal - Seismic Behaviour of Isolated Fluid Storage Tanks - A-state-Of-The-Art ReviewRaúl León MedinaОценок пока нет
- KIITEE 2019 17th Jan 2019 PDFДокумент88 страницKIITEE 2019 17th Jan 2019 PDFprasanta_bbsrОценок пока нет
- Microwave ExperimentДокумент18 страницMicrowave ExperimentChris RaymondОценок пока нет
- Tla ch03Документ2 страницыTla ch03api-334420312Оценок пока нет
- Desain Ruangan CT-ScanДокумент3 страницыDesain Ruangan CT-ScannewmanonmarsОценок пока нет
- Cavitation - ANSYS CFD PDFДокумент4 страницыCavitation - ANSYS CFD PDFMohsen SalehiОценок пока нет
- ECE Course DescriptionДокумент10 страницECE Course Descriptionengshimaa100% (1)
- Pile Length CalculationДокумент3 страницыPile Length CalculationCivilax.comОценок пока нет
- Hydraulic SealsДокумент2 страницыHydraulic SealsVahid ShalchiОценок пока нет
- Case 4 Sakhalin 1 ProjectДокумент29 страницCase 4 Sakhalin 1 ProjectashmitОценок пока нет
- DR - Web Anti-Virus - How To Remove Virus (BackDoor - hupigon2.YBS) - (DRWEBHKДокумент2 страницыDR - Web Anti-Virus - How To Remove Virus (BackDoor - hupigon2.YBS) - (DRWEBHKSyazwan Hj ShahОценок пока нет
- Flight Conrol Division Mission Operations Report Apollo 13Документ345 страницFlight Conrol Division Mission Operations Report Apollo 13Bob Andrepont100% (1)
- HFY-GEN-CIV-SPC-0009 - B Specification For Excavation, Backfill and Compaction Code-AДокумент19 страницHFY-GEN-CIV-SPC-0009 - B Specification For Excavation, Backfill and Compaction Code-ATahir FadhilОценок пока нет
- Design Guide For Structure & FoundationДокумент50 страницDesign Guide For Structure & FoundationDifa Liu100% (1)