Вам также может понравиться
- H 0.0675K K Distance in Kilometers H in Meters: V K Horizontal Line of SightДокумент5 страницH 0.0675K K Distance in Kilometers H in Meters: V K Horizontal Line of SightAl CohellОценок пока нет
- Lab Report On SurveyingДокумент3 страницыLab Report On SurveyingJoycelyn Uy0% (1)
- Problem Set - Tacheometric SurveysДокумент2 страницыProblem Set - Tacheometric SurveysKendel Bolanio67% (3)
- Surveying Refresher SetДокумент4 страницыSurveying Refresher SetFredie Ferrer33% (3)
- Taping On Smooth Level Ground LevelДокумент7 страницTaping On Smooth Level Ground LevelCHRISTIAN NATHANIEL PALMA0% (1)
- 23 24Документ2 страницы23 24Earl averzosaОценок пока нет
- Elementary Surveying Field Manual Field Work No.2 Taping On Level and On Uneven GroundДокумент16 страницElementary Surveying Field Manual Field Work No.2 Taping On Level and On Uneven GroundSid LimОценок пока нет
- Exer. 1 PACINGДокумент7 страницExer. 1 PACINGMarizajiell Garcia GalangОценок пока нет
- SURVEYING I and IIДокумент10 страницSURVEYING I and IIBer Ryl0% (1)
- Exercise 4 - Distance Measurment by Stadia MethodДокумент5 страницExercise 4 - Distance Measurment by Stadia MethodMark100% (1)
- Reversed CurveДокумент2 страницыReversed CurveMark Real Jubilo57% (7)
- Workbook in Higher SurveyingДокумент104 страницыWorkbook in Higher SurveyingMark Allen Miras0% (1)
- Measurement of Vertical DistancesДокумент55 страницMeasurement of Vertical DistancesKriztan Carlo San Jose50% (2)
- Measurement of Horizontal Distances Problem Set 2 1. PACING. in Walking Along A 75-m Course, The Pacer of A Field Party CountedДокумент38 страницMeasurement of Horizontal Distances Problem Set 2 1. PACING. in Walking Along A 75-m Course, The Pacer of A Field Party CountedOwen Francis Arles Maongat100% (1)
- Fieldwork 6Документ9 страницFieldwork 6Calvin Joshua Lacson50% (2)
- SurveysДокумент5 страницSurveysVier Eli Dakiwag BusligОценок пока нет
- FW - 1 - Distance by TapingДокумент4 страницыFW - 1 - Distance by TapingJersonFerrerasPuaОценок пока нет
- Reversed CurvesДокумент7 страницReversed CurvesMarc Dared Cagaoan67% (9)
- Exer 1 Determination of Pace FactorДокумент4 страницыExer 1 Determination of Pace Factorsheil.cogay60% (5)
- Example Problems in Elementary Surveying PDFДокумент2 страницыExample Problems in Elementary Surveying PDFSelino CruzОценок пока нет
- SURVEYING Module 1 To 4Документ17 страницSURVEYING Module 1 To 4Hades Vesarius Riego100% (1)
- Learning Module 2 CE 245Документ20 страницLearning Module 2 CE 245Benmark JabayОценок пока нет
- CE Board Nov 2020 - Surverying - Set 1 PDFДокумент2 страницыCE Board Nov 2020 - Surverying - Set 1 PDFAndrey Anne Medina67% (3)
- Lab Report 1 Final Final FinalДокумент4 страницыLab Report 1 Final Final FinalChristopher Joshua MartinezОценок пока нет
- Field Work 2Документ12 страницField Work 2Paulo Remulla50% (2)
- Earth's Curvature and Atmospheric RefractionДокумент11 страницEarth's Curvature and Atmospheric RefractionCharles Carpo67% (3)
- Problem Sets - Simple, Compound, Reverse Curved PDFДокумент4 страницыProblem Sets - Simple, Compound, Reverse Curved PDFBeerRide50% (6)
- Control SurveyДокумент7 страницControl SurveyVerlyn Kate Pang-ayОценок пока нет
- Higher Surveying With SolutionДокумент35 страницHigher Surveying With SolutionNala A.Оценок пока нет
- Stadia SurveyingДокумент4 страницыStadia SurveyingMarc Dared Cagaoan38% (8)
- Laying Out Simple Curve by Offset Long Chord MethodДокумент5 страницLaying Out Simple Curve by Offset Long Chord MethodEljenColanggo67% (3)
- Higher SurveyingДокумент103 страницыHigher SurveyingChristian GudinoОценок пока нет
- 3Документ1 страница3erica surtida0% (1)
- Problem Set 3Документ4 страницыProblem Set 3Brix MendozaОценок пока нет
- Profile Leveling LecДокумент14 страницProfile Leveling LecJohn Lopez100% (1)
- 10-5-13 SURVEYING (Refresher Module 1)Документ2 страницы10-5-13 SURVEYING (Refresher Module 1)Manuelito Zapata0% (1)
- Differential LevellingДокумент7 страницDifferential LevellingJacky Lou Germano100% (1)
- Problem Set 2 Compound CurveДокумент12 страницProblem Set 2 Compound Curvezhwan Anwar nooriОценок пока нет
- Surveying ProblemsДокумент4 страницыSurveying ProblemsFrancisco De Real Onde60% (5)
- Surveying InstrumentsДокумент21 страницаSurveying InstrumentsJeisther Timothy Galano100% (1)
- Reversed CurveДокумент7 страницReversed CurveBenjo SantosОценок пока нет
- Lecture 10B - Area Computation Techniques and Omitted MeasurementsДокумент14 страницLecture 10B - Area Computation Techniques and Omitted MeasurementsAndreaMiccaBautistaОценок пока нет
- Field Work No. 5 Differential Leveling With and Without Turning Points PDFДокумент8 страницField Work No. 5 Differential Leveling With and Without Turning Points PDFJawahir GomezОценок пока нет
- Surveying Lab Exercise OutlineДокумент19 страницSurveying Lab Exercise OutlineBenjie Latriz40% (5)
- PDFДокумент1 страницаPDFkeith ryan lapizarОценок пока нет
- Tachymetric Surveying (Black and White)Документ16 страницTachymetric Surveying (Black and White)Rain Malabanan67% (6)
- Besavilla: Review CenterДокумент33 страницыBesavilla: Review CenterVon Andrei MedinaОценок пока нет
- W.B Fundamentals of SurveyingV 1Документ92 страницыW.B Fundamentals of SurveyingV 1jicelaОценок пока нет
- The Stadia MethodДокумент17 страницThe Stadia MethodRegine Allen S. PagaranОценок пока нет
- Elementary SurveyingДокумент16 страницElementary SurveyingMeruel BoreresОценок пока нет
- Lab Exercise No 7Документ3 страницыLab Exercise No 7Clarise AlmeriaОценок пока нет
- 3.measurement of Horizontal DistancesДокумент40 страниц3.measurement of Horizontal DistancesIAN DOMINIC LAGMAN75% (4)
- 117Документ2 страницы117Toni0% (2)
- 4b. METHODS FOR DETERMINING DIFFERENCE IN ELEVATIONДокумент24 страницы4b. METHODS FOR DETERMINING DIFFERENCE IN ELEVATIONJan Chris Villanueva100% (1)
- Chapter Three: LevelingДокумент45 страницChapter Three: LevelingBon MelОценок пока нет
- 4c. METHODS FOR DETERMINING DIFFERENCE IN ELEVATION 2Документ19 страниц4c. METHODS FOR DETERMINING DIFFERENCE IN ELEVATION 2Jan Chris VillanuevaОценок пока нет
- LevellingДокумент15 страницLevellingMurunga AllanОценок пока нет
- 2 Use and Care of Level: DefinitionsДокумент20 страниц2 Use and Care of Level: DefinitionsAvish GunnuckОценок пока нет
- Leveling Intro & Methods Lec 7Документ26 страницLeveling Intro & Methods Lec 7Mistr MaskОценок пока нет
- Total StationДокумент12 страницTotal StationLic Torres JimenezОценок пока нет
- Construction (Completion) of Multi-Purpose Building (Covered Court) at Barangay AlacanДокумент2 страницыConstruction (Completion) of Multi-Purpose Building (Covered Court) at Barangay AlacanMarc Dared CagaoanОценок пока нет
- AbcsummaryДокумент1 страницаAbcsummaryMarc Dared CagaoanОценок пока нет
- Annex AДокумент2 страницыAnnex AMarc Dared CagaoanОценок пока нет
- Annex CДокумент3 страницыAnnex CMarc Dared CagaoanОценок пока нет
- Backup 1Документ7 страницBackup 1Marc Dared CagaoanОценок пока нет
- SummaryДокумент1 страницаSummaryMarc Dared CagaoanОценок пока нет
- Alacan (48 Bakal)Документ107 страницAlacan (48 Bakal)Marc Dared CagaoanОценок пока нет
- 04Документ1 страница04Marc Dared CagaoanОценок пока нет
- Backup 2Документ4 страницыBackup 2Marc Dared CagaoanОценок пока нет
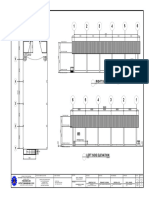
- Right Side Elevation: Proposed StageДокумент1 страницаRight Side Elevation: Proposed StageMarc Dared CagaoanОценок пока нет
- Department of Public Works and Highways: Pangasinan 2Nd District Engineering OfficeДокумент1 страницаDepartment of Public Works and Highways: Pangasinan 2Nd District Engineering OfficeMarc Dared CagaoanОценок пока нет
- Perspective View: Architectural Structural ElectricalДокумент1 страницаPerspective View: Architectural Structural ElectricalMarc Dared CagaoanОценок пока нет
- Annex AДокумент2 страницыAnnex AMarc Dared CagaoanОценок пока нет
- Location MapДокумент1 страницаLocation MapMarc Dared CagaoanОценок пока нет
- Vo Suit 01Документ427 страницVo Suit 01Marc Dared CagaoanОценок пока нет
- Construction of Multi-Purpose Building, Brgy. Nancasalan: As Submitted As EvaluatedДокумент2 страницыConstruction of Multi-Purpose Building, Brgy. Nancasalan: As Submitted As EvaluatedMarc Dared CagaoanОценок пока нет
- Program of Work/Budget Cost: FORM POW-2015-01-00Документ1 страницаProgram of Work/Budget Cost: FORM POW-2015-01-00Marc Dared CagaoanОценок пока нет
- Construction of Multi-Purpose Building, Brgy. MalimpuecДокумент2 страницыConstruction of Multi-Purpose Building, Brgy. MalimpuecMarc Dared CagaoanОценок пока нет
- Construction of Two (2) Storey Six (6) Classrrom School Building at Suit E/S Dagupan City, PangasinanДокумент1 страницаConstruction of Two (2) Storey Six (6) Classrrom School Building at Suit E/S Dagupan City, PangasinanMarc Dared CagaoanОценок пока нет
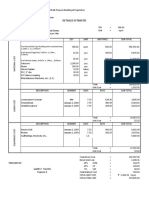
- FORM POW-2015-01C-00 Detailed Breakdown of Component For Each Item Total Mark-Up 5 % Vat Total Cost QTY % Unit Direct Cost Item No. DescriptionДокумент3 страницыFORM POW-2015-01C-00 Detailed Breakdown of Component For Each Item Total Mark-Up 5 % Vat Total Cost QTY % Unit Direct Cost Item No. DescriptionMarc Dared CagaoanОценок пока нет
- An Institution Providing Medical and Surgical Treatment and Nursing Care For Sick or Injured People. MasonДокумент2 страницыAn Institution Providing Medical and Surgical Treatment and Nursing Care For Sick or Injured People. MasonMarc Dared CagaoanОценок пока нет
- Construction of Multi GeotagДокумент3 страницыConstruction of Multi GeotagMarc Dared CagaoanОценок пока нет
- Wanted: Laborers Individual Who Could Perform ConstructionДокумент1 страницаWanted: Laborers Individual Who Could Perform ConstructionMarc Dared CagaoanОценок пока нет
- Department of Public Works and Highways: Pangasinan 2 District Engineering OfficeДокумент5 страницDepartment of Public Works and Highways: Pangasinan 2 District Engineering OfficeMarc Dared CagaoanОценок пока нет
- Nancasalan 16x18Документ109 страницNancasalan 16x18Marc Dared CagaoanОценок пока нет
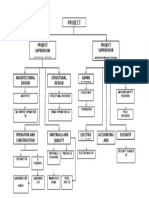
- Project: Organizational ChartДокумент1 страницаProject: Organizational ChartMarc Dared CagaoanОценок пока нет
- Indicators Without The Project With The Project RemarksДокумент2 страницыIndicators Without The Project With The Project RemarksMarc Dared CagaoanОценок пока нет
- Alice Walker - Everything Is A Human BeingДокумент7 страницAlice Walker - Everything Is A Human BeingMary-Jane Sighs100% (1)
- Mineral Prospecting in Central Part of Kebbi State, NigeriaДокумент5 страницMineral Prospecting in Central Part of Kebbi State, NigeriaIJRASETPublicationsОценок пока нет
- 2 Physical Geography Earth Environments and SystemsДокумент35 страниц2 Physical Geography Earth Environments and SystemsAngelie Vi CabacunganОценок пока нет
- ARGeo-C4 ProgrammeДокумент6 страницARGeo-C4 ProgrammesafariteqОценок пока нет
- Cropingadamas3 SDFДокумент347 страницCropingadamas3 SDFKamil PasyaОценок пока нет
- Artifact Tag Terminology Key PDFДокумент3 страницыArtifact Tag Terminology Key PDFapi-301855175Оценок пока нет
- 12th Geography Book Back Questions in EnglishДокумент16 страниц12th Geography Book Back Questions in EnglishVenkat0% (1)
- 12 Annotatedbibliography May2013Документ118 страниц12 Annotatedbibliography May2013Ahmad KatsuragiОценок пока нет
- Dhoni E-Brochure PDFДокумент32 страницыDhoni E-Brochure PDFvamsiОценок пока нет
- Geologic Time Scale Project Rubric - Sheet1 1Документ1 страницаGeologic Time Scale Project Rubric - Sheet1 1api-251368747Оценок пока нет
- Back MatterДокумент50 страницBack MatterJoshua HomanОценок пока нет
- USCG Lighthouses Atlantic CoastДокумент388 страницUSCG Lighthouses Atlantic CoastCAP History Library100% (1)
- Hurricane Map EnglishДокумент1 страницаHurricane Map EnglishJen ChungОценок пока нет
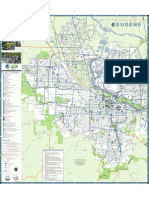
- Eugene Bike Map 2010Документ1 страницаEugene Bike Map 2010webikeeugeneОценок пока нет
- Culture CollocationsДокумент5 страницCulture CollocationsNgọc ThúyОценок пока нет
- History of Urban SettlementsДокумент103 страницыHistory of Urban Settlements200211555Оценок пока нет
- Int Is - Gis - Kms NotesДокумент16 страницInt Is - Gis - Kms NotesMulumudi PrabhakarОценок пока нет
- Strategi Pengembangan Desa Wisata Pesisir Di Desa Tambakrejo Kabupaten MalangДокумент12 страницStrategi Pengembangan Desa Wisata Pesisir Di Desa Tambakrejo Kabupaten MalangIfanОценок пока нет
- Thesis On SPM Pipe LayingДокумент64 страницыThesis On SPM Pipe Layingydmisra100% (6)
- Anatomy of Orogenic BeltsДокумент23 страницыAnatomy of Orogenic BeltsAisyahОценок пока нет
- Chap 1Документ57 страницChap 1Rynn PhanОценок пока нет
- Arc One PieceДокумент2 страницыArc One PieceRa Semba0% (1)
- Montessori Geography CoopДокумент3 страницыMontessori Geography Coopjewelsglosenger0% (1)
- GTK Map Explanation Volume3Документ247 страницGTK Map Explanation Volume3Elton100% (1)
- Tourism in East AfricaДокумент3 страницыTourism in East AfricaJoseph Zotoo100% (1)
- The Five Cs of Neighborhood PlanningДокумент6 страницThe Five Cs of Neighborhood PlanningFadly Bron IbrahimОценок пока нет
- Delhi Gazeetter 1912Документ224 страницыDelhi Gazeetter 1912Rashid FaridiОценок пока нет
- Foundation Final InspectionДокумент8 страницFoundation Final Inspectionnasrul dracoОценок пока нет
- Quantum GIS On Android: Marco BernasocchiДокумент61 страницаQuantum GIS On Android: Marco BernasocchiIsra WahyudhiОценок пока нет
- Rainfall StatisticsДокумент114 страницRainfall StatisticsAvinash NaikОценок пока нет