Вам также может понравиться
- Sesion 1Документ14 страницSesion 1arnoldmoyaОценок пока нет
- Maquinas HidráulicasДокумент10 страницMaquinas HidráulicasAnthony PerezОценок пока нет
- Light Yagami, el protagonista de Death NoteДокумент11 страницLight Yagami, el protagonista de Death NoteAnthony PerezОценок пока нет
- Alaianza LimaДокумент4 страницыAlaianza LimaAnthony PerezОценок пока нет
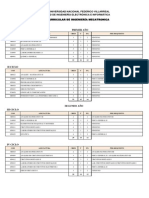
- Escuela Mecatronica Malla CurricularДокумент1 страницаEscuela Mecatronica Malla CurricularArmando YPОценок пока нет
- Ecuación DiferencialДокумент2 страницыEcuación DiferencialAnthony PerezОценок пока нет
- Ficha Inscripción 2015Документ1 страницаFicha Inscripción 2015Anthony PerezОценок пока нет
- Plan Curricular MecatronicaДокумент3 страницыPlan Curricular MecatronicaAnthony PerezОценок пока нет
- Probador de Servos Con El IntegradoДокумент9 страницProbador de Servos Con El IntegradoAnthony PerezОценок пока нет
- Ejercicios de Estática: Fuerza Cortante y Momento FlexionanteДокумент5 страницEjercicios de Estática: Fuerza Cortante y Momento FlexionanteEric PerezОценок пока нет
- El Timer 555-556Документ6 страницEl Timer 555-556cidcajasОценок пока нет
- Control de Motores de CCДокумент3 страницыControl de Motores de CCAnthony PerezОценок пока нет
- Microprocesadores SavageДокумент354 страницыMicroprocesadores SavageErándini Brizuela HerreraОценок пока нет
- Division de Numero BinariosДокумент8 страницDivision de Numero BinariosJ-jo DjdОценок пока нет
- Ejemplo de Maquina de EstadosДокумент7 страницEjemplo de Maquina de Estadoskaggi0Оценок пока нет
- Formulas Del Trabajo Mecánico para Primer Grado de Secundaria PDFДокумент4 страницыFormulas Del Trabajo Mecánico para Primer Grado de Secundaria PDFAlonso Anwar Vargas SaavedraОценок пока нет
- AVILA MARTIN, CARMEN Los Recuentos Léxicos Con Indicación de La Frecuencia en Español VII JILH LISBOA 2018Документ10 страницAVILA MARTIN, CARMEN Los Recuentos Léxicos Con Indicación de La Frecuencia en Español VII JILH LISBOA 2018Maria Jose CarpizoОценок пока нет
- Eras Geologicas Grado 9° 2019-2020Документ39 страницEras Geologicas Grado 9° 2019-2020MANUELA GIRALDO TORRESОценок пока нет
- Ensayo La Planeación Estratégica Como Respuesta Ante La Crisis EconómicaДокумент4 страницыEnsayo La Planeación Estratégica Como Respuesta Ante La Crisis EconómicaDiego PovedaОценок пока нет
- Historia de La AstronomiaДокумент6 страницHistoria de La AstronomiaNeidy Rios AguileraОценок пока нет
- Fase 1 Parra JulianaДокумент16 страницFase 1 Parra JulianaJuliana ParraОценок пока нет
- Last1 U2 Ea AltrДокумент8 страницLast1 U2 Ea AltrAlejandra TorresОценок пока нет
- Evaluación U2 PDFДокумент4 страницыEvaluación U2 PDFAyónPlayОценок пока нет
- Manual Supervivencia EscolarДокумент20 страницManual Supervivencia EscolarJirfunsote PayudoОценок пока нет
- Curso Diseño Web HTMLДокумент6 страницCurso Diseño Web HTMLMichkayla Cruz Franco0% (1)
- La Evaluación Del Plan de Estudios de La Licenciatura en Psicopedagogía en Una Institución Educativa de TlaxcalaДокумент14 страницLa Evaluación Del Plan de Estudios de La Licenciatura en Psicopedagogía en Una Institución Educativa de Tlaxcala印露露Оценок пока нет
- Definición e importancia de los grandes proyectosДокумент6 страницDefinición e importancia de los grandes proyectosYanneth VichegaОценок пока нет
- Fica de Inmuebles de Conservacion HistoricaДокумент5 страницFica de Inmuebles de Conservacion HistoricaEmanuel GascaОценок пока нет
- Manual en Español HSMWorksДокумент33 страницыManual en Español HSMWorksFabian Gomez Alvarez0% (1)
- 2o Lista de Cotejo EvДокумент8 страниц2o Lista de Cotejo EvMiguel Ángel Rodriguez GuevaraОценок пока нет
- Algebra Vectorial - Teoremas y EjerciciosДокумент7 страницAlgebra Vectorial - Teoremas y EjerciciosAndrea SubeldiaОценок пока нет
- PDF Cfe Caracteristicas Tecnicas Relevadores de Proteccion CompressДокумент56 страницPDF Cfe Caracteristicas Tecnicas Relevadores de Proteccion Compresseduardo ulloaОценок пока нет
- Actividad de Puntos Evaluables Escenario 2 Primer Bloque Teorico Psicologia Educativa Grupo b02Документ7 страницActividad de Puntos Evaluables Escenario 2 Primer Bloque Teorico Psicologia Educativa Grupo b02KevinCifuentesОценок пока нет
- La Madera en La ConstrucciónДокумент25 страницLa Madera en La ConstrucciónItzel Mac0% (1)
- Informe Saponificación Del Aceite UsadoДокумент7 страницInforme Saponificación Del Aceite Usado05-OB-HU-CARLA DANIELA VILCAS CARRIONОценок пока нет
- Secado RapidoДокумент2 страницыSecado RapidoJobanny Uc RosadoОценок пока нет
- 3° Lenguaje PPT 1uso de MayúsculaДокумент8 страниц3° Lenguaje PPT 1uso de MayúsculaVicky Ortiz CastañedaОценок пока нет
- Proceso Asignación Espacios Educación Media Superior Nuevo LeónДокумент2 страницыProceso Asignación Espacios Educación Media Superior Nuevo LeónAngel Aguillon CisnerosОценок пока нет
- Brochure-Pruebas 2022Документ10 страницBrochure-Pruebas 2022Andrea CruzОценок пока нет
- CATALOGO EGAmaster AntichispaДокумент64 страницыCATALOGO EGAmaster AntichispaYimmy Alexander Parra MarulandaОценок пока нет
- Evaluación diagnóstica de mecánica vectorialДокумент3 страницыEvaluación diagnóstica de mecánica vectorialMilagros RamosОценок пока нет
- Repaso de Contabilidad GubernamentalДокумент3 страницыRepaso de Contabilidad GubernamentalEdith RojasОценок пока нет
- Capitulo 4Документ52 страницыCapitulo 4Maria SarayОценок пока нет
- PDF Minuta de Constitucion de La Empresa Eventos Gourmet - CompressДокумент4 страницыPDF Minuta de Constitucion de La Empresa Eventos Gourmet - Compresshector cabreraОценок пока нет
- Declaracion de Cambio Por Exportaciones de Bienes Formulario N 2 SENAДокумент1 страницаDeclaracion de Cambio Por Exportaciones de Bienes Formulario N 2 SENAanderson castañoОценок пока нет