Вам также может понравиться
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationОт EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationОценок пока нет
- Module 3: Advanced AlpДокумент47 страницModule 3: Advanced AlpSudeeksha GanguliОценок пока нет
- By Vijay Kumar. K Asst. Professor Dept. of ECEДокумент67 страницBy Vijay Kumar. K Asst. Professor Dept. of ECEsrianjaneya1234Оценок пока нет
- Lecture 13Документ53 страницыLecture 13Areeb Saqib ButtОценок пока нет
- Interfacing With Advanced DevicesДокумент76 страницInterfacing With Advanced DevicesSai Krishna KodaliОценок пока нет
- Interrupts: Interrupt Service Routine (ISR)Документ20 страницInterrupts: Interrupt Service Routine (ISR)wur53719Оценок пока нет
- Microprpcessor 8086Документ29 страницMicroprpcessor 8086amanОценок пока нет
- Assembly Programming BasicsДокумент46 страницAssembly Programming BasicsHarsh KaushalyaОценок пока нет
- Software and Hardware Interrupt ApplicationsДокумент10 страницSoftware and Hardware Interrupt Applicationssatyanarayana12Оценок пока нет
- Advanced Topics: 17.1 Hardware Control Using I/O PortsДокумент34 страницыAdvanced Topics: 17.1 Hardware Control Using I/O Portsbarbarossa17Оценок пока нет
- 8086 Interrupt System: By. M. ChinyukuДокумент29 страниц8086 Interrupt System: By. M. ChinyukuProsper MuzendaОценок пока нет
- Short Notes Chapter 8 (Lecture 22-23) :: Why Interrupts Must Be Asynchronous?Документ4 страницыShort Notes Chapter 8 (Lecture 22-23) :: Why Interrupts Must Be Asynchronous?The best maxОценок пока нет
- In The Real Mode, Each of These Instructions Fetches A Vector From The Vector Table, and Then Calls The Procedure Stored at The Location Addressed by The VectorДокумент5 страницIn The Real Mode, Each of These Instructions Fetches A Vector From The Vector Table, and Then Calls The Procedure Stored at The Location Addressed by The Vectorsaqib idreesОценок пока нет
- HW2 Operating SystemsДокумент9 страницHW2 Operating SystemsSainadh GodenaОценок пока нет
- Computer Architecture Unit 2 - Phase 1 PDFДокумент52 страницыComputer Architecture Unit 2 - Phase 1 PDFvithyaОценок пока нет
- 2019-CPE-27 Microprocessor Assignment No 2Документ16 страниц2019-CPE-27 Microprocessor Assignment No 2Haalim MОценок пока нет
- Hardware Interrupts: Thorne: 21.1, 21.3 Thorne: 21.1, 21.3 (Irvine Edition IV: Section 16.4)Документ80 страницHardware Interrupts: Thorne: 21.1, 21.3 Thorne: 21.1, 21.3 (Irvine Edition IV: Section 16.4)Mafuzal HoqueОценок пока нет
- 8086 Processor InterruptsДокумент5 страниц8086 Processor InterruptsSheikh Noor MohammadОценок пока нет
- Assembly Language (Lab Manual)Документ13 страницAssembly Language (Lab Manual)Nurfaizah Hasanah Sahimi100% (2)
- Hardware Interrupts: Thorne: 21.1, 21.3 Thorne: 21.1, 21.3 (Irvine Edition IV: Section 16.4)Документ79 страницHardware Interrupts: Thorne: 21.1, 21.3 Thorne: 21.1, 21.3 (Irvine Edition IV: Section 16.4)babanpОценок пока нет
- Comp 321 Lecture Slide Chapter 4 (Basic Computer Organization and Design)Документ28 страницComp 321 Lecture Slide Chapter 4 (Basic Computer Organization and Design)dokumbaro30Оценок пока нет
- 8086 Instruction SetsДокумент13 страниц8086 Instruction SetsElanor ElОценок пока нет
- Lab 2Документ10 страницLab 2waleedОценок пока нет
- Interrupts in 8086 MicroprocessorДокумент8 страницInterrupts in 8086 MicroprocessorGemechis GurmesaОценок пока нет
- BIOS and DOS InterruptsДокумент42 страницыBIOS and DOS Interruptsapi-372513983% (6)
- 8086 MicroprocessorДокумент32 страницы8086 MicroprocessorMohamedОценок пока нет
- Input Output Operations Using AVR Studio: Atmega-16/32 Pin DescriptionДокумент26 страницInput Output Operations Using AVR Studio: Atmega-16/32 Pin Descriptionbala8350Оценок пока нет
- IT Unit-2 8086 System Timing & InterruptsДокумент33 страницыIT Unit-2 8086 System Timing & InterruptssrikanthОценок пока нет
- LAB#2Документ9 страницLAB#2Yousuf JamalОценок пока нет
- Developing An OS From Grounds UpДокумент45 страницDeveloping An OS From Grounds UporomosОценок пока нет
- Micro Controllers BasicsДокумент57 страницMicro Controllers BasicsHarry K GopaulОценок пока нет
- Experiment - 5 InterruptsДокумент4 страницыExperiment - 5 InterruptsEC100 Diya SoniОценок пока нет
- Lecture 7 - CSE 3205 - Microprocessor and Assembly Language - by - Marjia - Sultana (Autosaved)Документ25 страницLecture 7 - CSE 3205 - Microprocessor and Assembly Language - by - Marjia - Sultana (Autosaved)Marjia SultanaОценок пока нет
- MI Chapter 3Документ26 страницMI Chapter 3DANIEL ABERAОценок пока нет
- Unit - Iii 8086 InterruptsДокумент22 страницыUnit - Iii 8086 InterruptsNiharika KorukondaОценок пока нет
- Features of 8086 MicroprocessorДокумент234 страницыFeatures of 8086 MicroprocessorSUHANA PATELОценок пока нет
- Interrupts in Personal Computers: Experiment #6Документ10 страницInterrupts in Personal Computers: Experiment #6Asaad HalayqaОценок пока нет
- CSC 222: Computer Organization: & Assembly LanguageДокумент33 страницыCSC 222: Computer Organization: & Assembly LanguageAbdul RahmanОценок пока нет
- VHDLДокумент46 страницVHDLNischay MahamanaОценок пока нет
- InterruptsДокумент34 страницыInterruptssharathchandraОценок пока нет
- Assemblynotes Revised2010Документ17 страницAssemblynotes Revised2010Ojibwe UnanimesОценок пока нет
- 8086Документ16 страниц8086SanthaKumar IsaacОценок пока нет
- Objective: To Understand The Basic Concept and Functionality of Assembly LanguageДокумент9 страницObjective: To Understand The Basic Concept and Functionality of Assembly LanguageKAMRAN KHANОценок пока нет
- Interrupts Part 1Документ14 страницInterrupts Part 1leemong335Оценок пока нет
- InterruptsДокумент16 страницInterruptsRajaViriyalaОценок пока нет
- Interrupt of 8086Документ37 страницInterrupt of 8086pawar143Оценок пока нет
- Unconditional Jump InstructionsДокумент13 страницUnconditional Jump InstructionsAnonymous T9VvkMaОценок пока нет
- Chapter 03 8086Документ70 страницChapter 03 8086hari kcОценок пока нет
- Unit-3 CoaДокумент65 страницUnit-3 CoatarunprovidesОценок пока нет
- Basics of Programmable Logic ControllerДокумент79 страницBasics of Programmable Logic Controllersam_al_gino375Оценок пока нет
- ch3 Computer ArchitectureДокумент31 страницаch3 Computer ArchitectureMahesh BasnetОценок пока нет
- Lecture 6 Interrupt Driven IO AsmДокумент33 страницыLecture 6 Interrupt Driven IO AsmM SHAMIL ABBASОценок пока нет
- Lecture 3Документ39 страницLecture 3akttripathi0% (1)
- Malp Manual New-1Документ37 страницMalp Manual New-1Aditya RathodОценок пока нет
- Why AvrДокумент7 страницWhy AvrPurav VadodariaОценок пока нет
- Interrupts in Atmega16Документ3 страницыInterrupts in Atmega16Anoop S PillaiОценок пока нет
- Training ReportДокумент18 страницTraining Reportpiyushji125Оценок пока нет
- Chap5 InterruptsДокумент22 страницыChap5 InterruptscriОценок пока нет
- Lecture 3Документ39 страницLecture 3Joseph AntoОценок пока нет
- Maths 3 CompressedДокумент208 страницMaths 3 CompressedMatthew SmithОценок пока нет
- 10 1 1 558 3354Документ12 страниц10 1 1 558 3354Matthew SmithОценок пока нет
- C 20 MY 3 4 SemДокумент80 страницC 20 MY 3 4 SemMatthew SmithОценок пока нет
- Time Management Conference 2019Документ28 страницTime Management Conference 2019Matthew SmithОценок пока нет
- C 20 MTT 1 2 SemДокумент165 страницC 20 MTT 1 2 SemMatthew SmithОценок пока нет
- Material Science - CompressedДокумент82 страницыMaterial Science - CompressedMatthew SmithОценок пока нет
- Combustion PDFДокумент24 страницыCombustion PDFserkalemtОценок пока нет
- 1 s2.0 S0263822315005164 MainДокумент22 страницы1 s2.0 S0263822315005164 MainMatthew SmithОценок пока нет
- Influence of Interface On Epoxy/clay Nanocomposites: 1. Morphology StructureДокумент6 страницInfluence of Interface On Epoxy/clay Nanocomposites: 1. Morphology StructureMatthew SmithОценок пока нет
- Combustion in Si EnginesДокумент36 страницCombustion in Si Enginesrgopi_83Оценок пока нет
- Abst PHD EnotiadisДокумент2 страницыAbst PHD EnotiadisMatthew SmithОценок пока нет
- FM II AssaignmentДокумент2 страницыFM II AssaignmentMatthew SmithОценок пока нет
- Application of Taguchi Method For Optimization of Process Parameters in Improving The Surface Roughness of Lathe Facing OperationДокумент7 страницApplication of Taguchi Method For Optimization of Process Parameters in Improving The Surface Roughness of Lathe Facing Operationwww.irjes.comОценок пока нет
- 813201113306Документ10 страниц813201113306Matthew SmithОценок пока нет
- Basic Thermo 3Документ65 страницBasic Thermo 3Matthew SmithОценок пока нет
- 1 s2.0 S2211812814005872 MainДокумент7 страниц1 s2.0 S2211812814005872 MainMatthew SmithОценок пока нет
- 6Rph6Wxglhv RQ 0hfkdqlfdo 3urshuwlhv Ri (SR (/&7%1&od/ %Dvhg3Ro/Phu 1Dqrfrpsrvlwhv 31&Документ8 страниц6Rph6Wxglhv RQ 0hfkdqlfdo 3urshuwlhv Ri (SR (/&7%1&od/ %Dvhg3Ro/Phu 1Dqrfrpsrvlwhv 31&Matthew SmithОценок пока нет
- Automatic Transmission SystemДокумент21 страницаAutomatic Transmission SystemMamesh Mathankar100% (1)
- Study of Friction and Wear of ABS/Zno Polymer Composite Using Taguchi TechniqueДокумент10 страницStudy of Friction and Wear of ABS/Zno Polymer Composite Using Taguchi TechniqueMatthew SmithОценок пока нет
- Fluid Mechanics Question Paper December 2014 January 2015Документ2 страницыFluid Mechanics Question Paper December 2014 January 2015Matthew SmithОценок пока нет
- Front-Wheel-Drive (Transaxle and CV Joint) Fundamentals: © 2012 Delmar, Cengage LearningДокумент25 страницFront-Wheel-Drive (Transaxle and CV Joint) Fundamentals: © 2012 Delmar, Cengage LearningMatthew SmithОценок пока нет
- CE June 2011Документ2 страницыCE June 2011sohan2902Оценок пока нет
- Automatic Transmission ApplicationsДокумент26 страницAutomatic Transmission ApplicationsMatthew SmithОценок пока нет
- BTD - QBДокумент25 страницBTD - QBMatthew SmithОценок пока нет
- Automatic Transmission SystemДокумент21 страницаAutomatic Transmission SystemMamesh Mathankar100% (1)
- Automobile EnginesДокумент86 страницAutomobile EnginesMatthew SmithОценок пока нет
- Types of Chassis LayoutДокумент8 страницTypes of Chassis LayoutMatthew SmithОценок пока нет
- Describe The Construction and Operation of Manual and Semi-Automatic Transmissions Used On Light VehiclesДокумент3 страницыDescribe The Construction and Operation of Manual and Semi-Automatic Transmissions Used On Light VehiclesMatthew SmithОценок пока нет
- 1 PBДокумент8 страниц1 PBMatthew SmithОценок пока нет
- 1 PBДокумент8 страниц1 PBMatthew SmithОценок пока нет
- Citrus Fruit ConductionДокумент5 страницCitrus Fruit Conductionapi-349869629Оценок пока нет
- External Conditions Imposed On The GroupДокумент8 страницExternal Conditions Imposed On The GroupPrakriti GoelОценок пока нет
- Developmental Model of Intercultural Sensitivity (Oral Com Quiz)Документ1 страницаDevelopmental Model of Intercultural Sensitivity (Oral Com Quiz)Hero DiasОценок пока нет
- Physics Chapter 3 Practice TestДокумент2 страницыPhysics Chapter 3 Practice TestVanessa Bugarin MananzanОценок пока нет
- PIC16F1946Документ448 страницPIC16F1946madhavaОценок пока нет
- Southeast Asia in Political Science Theory, Region, and Qualitative AnalysisДокумент19 страницSoutheast Asia in Political Science Theory, Region, and Qualitative Analysisမင္း ဆရာОценок пока нет
- Course 5 - Cooperative Principle and ImplicatureДокумент6 страницCourse 5 - Cooperative Principle and ImplicatureAnca Ionela ManoleОценок пока нет
- Tableau VM Tuning and Best PracticesДокумент6 страницTableau VM Tuning and Best Practicessrikanth_4allОценок пока нет
- 05 AccelerationDownIncline-2Документ4 страницы05 AccelerationDownIncline-2PeterОценок пока нет
- L15 Conflict Management SДокумент18 страницL15 Conflict Management SjnfzОценок пока нет
- Documentation 040Документ148 страницDocumentation 040proxemicОценок пока нет
- Planning For Big Data PDFДокумент88 страницPlanning For Big Data PDFexelius100% (1)
- Introduction To Marketing ManagementДокумент24 страницыIntroduction To Marketing ManagementDrRuchi GargОценок пока нет
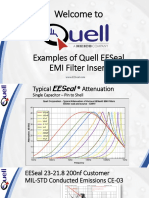
- Examples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsДокумент15 страницExamples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsXto PeregrinОценок пока нет
- C-Code Software Routines For Using The SPI Interface On The MAX7456 On-Screen DisplayДокумент9 страницC-Code Software Routines For Using The SPI Interface On The MAX7456 On-Screen DisplayVinay Ashwath100% (2)
- Happy FinalДокумент32 страницыHappy FinalRaju MehtaОценок пока нет
- Bekele (2005) Urbanization and Urban SprawlДокумент65 страницBekele (2005) Urbanization and Urban Sprawlentbeard77100% (3)
- H14YS-5A-2301-Reminder - 110423Документ3 страницыH14YS-5A-2301-Reminder - 110423BẢO Nhi LêОценок пока нет
- SM-A315G - LA Electrical Part List Galaxy A31Документ10 страницSM-A315G - LA Electrical Part List Galaxy A31liquidОценок пока нет
- Lecture Slides: Elementary StatisticsДокумент129 страницLecture Slides: Elementary StatisticsHassan HusseinОценок пока нет
- 505xt 1 en PDFДокумент242 страницы505xt 1 en PDFSyed Mohammad NaveedОценок пока нет
- AucomДокумент10 страницAucomAlberto Suazo BasaezОценок пока нет
- Fordyce MW 1983Документ46 страницFordyce MW 1983garbagepatchОценок пока нет
- Nlaa Siam.2010Документ1 страницаNlaa Siam.2010YesicaAquinoОценок пока нет
- #1Документ74 страницы#1Brianne Yuen TyskОценок пока нет
- Community Health Nursing Course DescriptionДокумент1 страницаCommunity Health Nursing Course DescriptionMiegan BaluyotОценок пока нет
- Academic Misconduct PolicyДокумент29 страницAcademic Misconduct PolicySahil BatraОценок пока нет
- Assessment #1 StatisticsДокумент4 страницыAssessment #1 StatisticsjemimaОценок пока нет
- Understanding Work Conditioning and Work Hardening Programs For A Successful RTW 3 13 2014 NovaCare PDFДокумент37 страницUnderstanding Work Conditioning and Work Hardening Programs For A Successful RTW 3 13 2014 NovaCare PDFSitiSarah0% (1)
- Shared Universe IntroДокумент9 страницShared Universe IntroLeafbladeОценок пока нет
- Grokking Algorithms: An illustrated guide for programmers and other curious peopleОт EverandGrokking Algorithms: An illustrated guide for programmers and other curious peopleРейтинг: 4 из 5 звезд4/5 (16)
- Microsoft 365 Guide to Success: 10 Books in 1 | Kick-start Your Career Learning the Key Information to Master Your Microsoft Office Files to Optimize Your Tasks & Surprise Your Colleagues | Access, Excel, OneDrive, Outlook, PowerPoint, Word, Teams, etc.От EverandMicrosoft 365 Guide to Success: 10 Books in 1 | Kick-start Your Career Learning the Key Information to Master Your Microsoft Office Files to Optimize Your Tasks & Surprise Your Colleagues | Access, Excel, OneDrive, Outlook, PowerPoint, Word, Teams, etc.Рейтинг: 5 из 5 звезд5/5 (2)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.От EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Рейтинг: 5 из 5 звезд5/5 (34)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceОт EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceОценок пока нет
- Python for Beginners: A Crash Course Guide to Learn Python in 1 WeekОт EverandPython for Beginners: A Crash Course Guide to Learn Python in 1 WeekРейтинг: 4.5 из 5 звезд4.5/5 (7)
- How to Make a Video Game All By Yourself: 10 steps, just you and a computerОт EverandHow to Make a Video Game All By Yourself: 10 steps, just you and a computerРейтинг: 5 из 5 звезд5/5 (1)
- Once Upon an Algorithm: How Stories Explain ComputingОт EverandOnce Upon an Algorithm: How Stories Explain ComputingРейтинг: 4 из 5 звезд4/5 (43)
- Clean Code: A Handbook of Agile Software CraftsmanshipОт EverandClean Code: A Handbook of Agile Software CraftsmanshipРейтинг: 5 из 5 звезд5/5 (13)
- Python Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)От EverandPython Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)Рейтинг: 5 из 5 звезд5/5 (1)
- Nine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersОт EverandNine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersРейтинг: 5 из 5 звезд5/5 (7)
- Software Engineering at Google: Lessons Learned from Programming Over TimeОт EverandSoftware Engineering at Google: Lessons Learned from Programming Over TimeРейтинг: 4 из 5 звезд4/5 (11)
- Blockchain Basics: A Non-Technical Introduction in 25 StepsОт EverandBlockchain Basics: A Non-Technical Introduction in 25 StepsРейтинг: 4.5 из 5 звезд4.5/5 (24)
- Python Machine Learning - Third Edition: Machine Learning and Deep Learning with Python, scikit-learn, and TensorFlow 2, 3rd EditionОт EverandPython Machine Learning - Third Edition: Machine Learning and Deep Learning with Python, scikit-learn, and TensorFlow 2, 3rd EditionРейтинг: 5 из 5 звезд5/5 (2)
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepОт EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepРейтинг: 4.5 из 5 звезд4.5/5 (19)
- Coders at Work: Reflections on the Craft of ProgrammingОт EverandCoders at Work: Reflections on the Craft of ProgrammingРейтинг: 4 из 5 звезд4/5 (151)
- Understanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerОт EverandUnderstanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerРейтинг: 4.5 из 5 звезд4.5/5 (44)
- Learn Algorithmic Trading: Build and deploy algorithmic trading systems and strategies using Python and advanced data analysisОт EverandLearn Algorithmic Trading: Build and deploy algorithmic trading systems and strategies using Python and advanced data analysisОценок пока нет
- Microsoft OneNote Guide to Success: Learn In A Guided Way How To Take Digital Notes To Optimize Your Understanding, Tasks, And Projects, Surprising Your Colleagues And ClientsОт EverandMicrosoft OneNote Guide to Success: Learn In A Guided Way How To Take Digital Notes To Optimize Your Understanding, Tasks, And Projects, Surprising Your Colleagues And ClientsРейтинг: 5 из 5 звезд5/5 (2)
- Web Development for beginners: Learn HTML/CSS/Javascript step by step with this Coding Guide, Programming Guide for beginners, Website developmentОт EverandWeb Development for beginners: Learn HTML/CSS/Javascript step by step with this Coding Guide, Programming Guide for beginners, Website developmentРейтинг: 5 из 5 звезд5/5 (3)
- What Algorithms Want: Imagination in the Age of ComputingОт EverandWhat Algorithms Want: Imagination in the Age of ComputingРейтинг: 3.5 из 5 звезд3.5/5 (41)