Вам также может понравиться
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОт EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОценок пока нет
- Stealth Philosophy, Real SolutionsДокумент10 страницStealth Philosophy, Real SolutionsSunil Kumar P GОценок пока нет
- The Development of the Multibeam Echosounder: A Historical AccountДокумент2 страницыThe Development of the Multibeam Echosounder: A Historical AccountKim Kiki ZaenuriОценок пока нет
- Modeling and Control of an Unmanned Underwater VehicleДокумент119 страницModeling and Control of an Unmanned Underwater Vehiclearash501Оценок пока нет
- A Brief Taxonomy of Autonomous Under Water Vehicle Design LiteratureДокумент4 страницыA Brief Taxonomy of Autonomous Under Water Vehicle Design Literaturedavid_okahОценок пока нет
- Guidelines For Design of Advanced Double Hull VesselsДокумент93 страницыGuidelines For Design of Advanced Double Hull Vesselswildfire142Оценок пока нет
- The 4 - 95 Stirling Engine For Underwater ApplicationДокумент4 страницыThe 4 - 95 Stirling Engine For Underwater ApplicationVladimirDvortsovОценок пока нет
- Advanced Degaussing SystemsДокумент8 страницAdvanced Degaussing Systemsaks180181Оценок пока нет
- 15th Numerical Towing Tank SymposiumДокумент223 страницы15th Numerical Towing Tank SymposiumYuriyAK100% (1)
- Lagrangian Particle Tracking of Spheres and CylindersДокумент38 страницLagrangian Particle Tracking of Spheres and CylindersRuddy PerezОценок пока нет
- Twin Screw PropulsionДокумент1 страницаTwin Screw Propulsionsansun1924Оценок пока нет
- Flimmer: A Flying Submarine - Spectra 2014Документ4 страницыFlimmer: A Flying Submarine - Spectra 2014U.S. Naval Research Laboratory100% (1)
- The ERCOFTAC Centrifugal Pump OpenFOAM Case-StudyДокумент10 страницThe ERCOFTAC Centrifugal Pump OpenFOAM Case-Studymtl0612Оценок пока нет
- Thermal Analysis of Friction Stir Welded Joint For 304l Stainless Steel Material Using Ansys Mechanical APDLДокумент6 страницThermal Analysis of Friction Stir Welded Joint For 304l Stainless Steel Material Using Ansys Mechanical APDLMichael SerraОценок пока нет
- Underwater Channel SimulationДокумент55 страницUnderwater Channel SimulationPratheek Praveen KumarОценок пока нет
- Degaussing SystemДокумент12 страницDegaussing SystemAlchemist_JVC50% (2)
- DegaussingДокумент14 страницDegaussingRoma GunawanОценок пока нет
- Evaluation of em Propagation ModelsДокумент162 страницыEvaluation of em Propagation ModelsoldjanusОценок пока нет
- 6 DOF Equations of MotionДокумент62 страницы6 DOF Equations of Motionmimi_chan_17Оценок пока нет
- 1 History: TitanicДокумент24 страницы1 History: TitanicChaitanya VarmaОценок пока нет
- Design of Polymer Composite Shell Structures for UUV ApplicationsДокумент60 страницDesign of Polymer Composite Shell Structures for UUV ApplicationsMoorthy Govindaraj0% (1)
- Cavitation Inception and NumberДокумент12 страницCavitation Inception and NumberrajeevОценок пока нет
- EML 222/2 Engineering Lab Ii: Experiment ReportДокумент14 страницEML 222/2 Engineering Lab Ii: Experiment ReportPurawin Subramaniam100% (1)
- A Fast Integration Method For Translating-Pulsating Green's Function in Bessho's FormДокумент12 страницA Fast Integration Method For Translating-Pulsating Green's Function in Bessho's FormYuriy KrayniyОценок пока нет
- Underwater Acoustic Noise Measurement of VesselsДокумент6 страницUnderwater Acoustic Noise Measurement of VesselsJohn KaruwalОценок пока нет
- Computational Fluid Dynamics For Naval Engineering ProblemsДокумент184 страницыComputational Fluid Dynamics For Naval Engineering ProblemsandevariОценок пока нет
- Tips and Tricks: Voftodpm - 10 Sep 2019: DR Paul Hutcheson Lead Tech Services Engineer, Ansys UkДокумент34 страницыTips and Tricks: Voftodpm - 10 Sep 2019: DR Paul Hutcheson Lead Tech Services Engineer, Ansys Ukumair35Оценок пока нет
- Predicting Pressure Distributions Using CFDДокумент177 страницPredicting Pressure Distributions Using CFDdedysusila100% (5)
- RGFGRID User ManualДокумент140 страницRGFGRID User ManualcocoОценок пока нет
- Submarine - WikipediaДокумент32 страницыSubmarine - WikipediaNaheed100% (1)
- Hydrodynamic Test Facilities PDFДокумент34 страницыHydrodynamic Test Facilities PDFDarshanОценок пока нет
- Prediction of Wave Impact Loads On Ship-Type Offshore Structures in Steep Fronted WavesДокумент113 страницPrediction of Wave Impact Loads On Ship-Type Offshore Structures in Steep Fronted WavesNguyen ThangОценок пока нет
- Proposal of A Groove Cavitator On A Supercavitation PropellerДокумент5 страницProposal of A Groove Cavitator On A Supercavitation PropellerMNirooeiОценок пока нет
- Ebooks - Acoustic Systems Descriptions PDFДокумент14 страницEbooks - Acoustic Systems Descriptions PDFgurit_perdanaОценок пока нет
- Elbit Offers Multi Mission Unmanned Naval RobotДокумент3 страницыElbit Offers Multi Mission Unmanned Naval RobotJulien Beleno Araneta100% (1)
- HakanNilssonRotatingMachineryTrainingOFW11 1 PDFДокумент70 страницHakanNilssonRotatingMachineryTrainingOFW11 1 PDFsalehi144Оценок пока нет
- Super Cavitation and Its Application in SubmarinesДокумент22 страницыSuper Cavitation and Its Application in Submarinesaksh2206Оценок пока нет
- Integrated ASW Suite for Effective Underwater WarfareДокумент16 страницIntegrated ASW Suite for Effective Underwater Warfarezhang yun100% (1)
- Underwater Explosion Damage of Ship Hull Panels PDFДокумент10 страницUnderwater Explosion Damage of Ship Hull Panels PDFFernando Raúl LADINOОценок пока нет
- 001 - Openfoam SSÇ ÀÚ ÁДокумент189 страниц001 - Openfoam SSÇ ÀÚ ÁAntonio Martín AlcántaraОценок пока нет
- FossenДокумент21 страницаFossenEgwuatu UchennaОценок пока нет
- Unmanned Undersea Vehicle (UUV) Sensor Data Formats: Standard Guide ForДокумент11 страницUnmanned Undersea Vehicle (UUV) Sensor Data Formats: Standard Guide ForAhmad Zubair RasulyОценок пока нет
- Supercavitating PropellerДокумент3 страницыSupercavitating PropellerfaisalzhuidaОценок пока нет
- Modelica Stream-Connectors-OverviewДокумент40 страницModelica Stream-Connectors-OverviewDaniel FernandezОценок пока нет
- CFD Assignment May 2017Документ2 страницыCFD Assignment May 2017蒲俊雄Оценок пока нет
- Rhie-Chow Interpolation in OpenFOAMДокумент7 страницRhie-Chow Interpolation in OpenFOAMOpenFOAM DocsОценок пока нет
- CFD and Marine ApplicationsДокумент64 страницыCFD and Marine ApplicationsshahzОценок пока нет
- CFD Simulation of VIV PDFДокумент84 страницыCFD Simulation of VIV PDFPasquale CutriОценок пока нет
- Underwater Vehicles PDFДокумент594 страницыUnderwater Vehicles PDFAnand Kishor SinghОценок пока нет
- Dynamic Overset Grids in OpenFOAM for Ship Self-Propulsion and Maneuvering SimulationsДокумент20 страницDynamic Overset Grids in OpenFOAM for Ship Self-Propulsion and Maneuvering SimulationsSiddhant AgarwalОценок пока нет
- DRA/NASA/ONERA collaboration on aircraft icing researchДокумент50 страницDRA/NASA/ONERA collaboration on aircraft icing researchasdfgbugmenotОценок пока нет
- A Multidisciplinary Design Optimization Approach To Relating Affordability and Performance in A Conceptual Submarine DesignДокумент17 страницA Multidisciplinary Design Optimization Approach To Relating Affordability and Performance in A Conceptual Submarine Designgnd100100% (1)
- Guidance and Control of Ocean Vehicles-Thor I FossenДокумент494 страницыGuidance and Control of Ocean Vehicles-Thor I Fossen孙慧慧100% (13)
- SYSSER50 hydrodynamics simulationДокумент4 страницыSYSSER50 hydrodynamics simulationking kingОценок пока нет
- Training Section 5Документ31 страницаTraining Section 5CeliaZurdoPerladoОценок пока нет
- Niraj Kumar: Study of Sloshing Effects in A Cylindrical Tank With and Without Baffles Under Linear AccelerationДокумент31 страницаNiraj Kumar: Study of Sloshing Effects in A Cylindrical Tank With and Without Baffles Under Linear AccelerationSaurabh Suman100% (1)
- A Methodology For A Hydrodynamic Analysis of A Moonpool Structure With Mooring Lines Using The ANSYS AQWA ProductДокумент25 страницA Methodology For A Hydrodynamic Analysis of A Moonpool Structure With Mooring Lines Using The ANSYS AQWA ProductRuly IrawanОценок пока нет
- Aplicaciones MilitaresДокумент4 страницыAplicaciones MilitaresMabel NúñezОценок пока нет
- Matecconf Icaet2016 01010Документ26 страницMatecconf Icaet2016 01010sagret10Оценок пока нет
- Document FileДокумент18 страницDocument FileSalma SherbazОценок пока нет
- CFD Fluent en El Casco DTMB 5415Документ34 страницыCFD Fluent en El Casco DTMB 5415klzsailingОценок пока нет
- Ship-to-Ship Interaction During Overtaki PDFДокумент16 страницShip-to-Ship Interaction During Overtaki PDFSalma SherbazОценок пока нет
- RingДокумент4 страницыRingSalma SherbazОценок пока нет
- A Study of Spin Effects On Tennis Ball AerodynamicsДокумент8 страницA Study of Spin Effects On Tennis Ball AerodynamicsFabrizzio ValerОценок пока нет
- Ship Behavior in Shallow WaterДокумент20 страницShip Behavior in Shallow WaterTomas GrigoliusОценок пока нет
- Probabilistic Mechanics of Explosive FragmentationДокумент6 страницProbabilistic Mechanics of Explosive FragmentationSalma Sherbaz100% (1)
- 3-D Modeling of Axial Fans CFDДокумент20 страниц3-D Modeling of Axial Fans CFDmatteo_1234Оценок пока нет
- 127 132 PDFДокумент6 страниц127 132 PDFMuhammad IrfanОценок пока нет
- Mathematical Model of Different Differential EquationsДокумент13 страницMathematical Model of Different Differential EquationsSalma SherbazОценок пока нет
- Analytical Prediction of Trajectories For High-Velocity Direct Fire Munitions PDFДокумент72 страницыAnalytical Prediction of Trajectories For High-Velocity Direct Fire Munitions PDFSalma SherbazОценок пока нет
- A Practical System For Hydrodynamic Optimization of Ship Hull FormsДокумент7 страницA Practical System For Hydrodynamic Optimization of Ship Hull FormsSalma SherbazОценок пока нет
- Explosive volcanic eruptions computedДокумент12 страницExplosive volcanic eruptions computedSalma SherbazОценок пока нет
- Airflow AnalysisДокумент7 страницAirflow AnalysisSalma SherbazОценок пока нет
- Golden-Section Search For Optimization in 1-DДокумент7 страницGolden-Section Search For Optimization in 1-DSalma SherbazОценок пока нет
- Hull Form Hydrodynamic Optimization Based On Parametric ModelingДокумент5 страницHull Form Hydrodynamic Optimization Based On Parametric ModelingSalma SherbazОценок пока нет
- 1029Документ15 страниц1029Richard Leonel Vasquez MezaОценок пока нет
- Linear Programming With MatlabДокумент279 страницLinear Programming With MatlabBinod Dhakal100% (2)
- Wave Restance For High-Speed CatamaransДокумент30 страницWave Restance For High-Speed CatamaransKay OosterwegelОценок пока нет
- Eulers-Method Best Example of Using Euler Method in Chemical ReactionДокумент48 страницEulers-Method Best Example of Using Euler Method in Chemical ReactionSalma SherbazОценок пока нет
- CFD Fluent en El Casco DTMB 5415Документ34 страницыCFD Fluent en El Casco DTMB 5415klzsailingОценок пока нет
- Analysis of The Flow Around A Cruise Ferry Hull by The Means of CFDДокумент95 страницAnalysis of The Flow Around A Cruise Ferry Hull by The Means of CFDSalma SherbazОценок пока нет
- Mathematical Modeling and ODEДокумент44 страницыMathematical Modeling and ODESalma SherbazОценок пока нет
- Init Val ProblemsДокумент19 страницInit Val ProblemsMujeeb AbdullahОценок пока нет
- Applications Diffrntl EqnsДокумент20 страницApplications Diffrntl EqnsMujeeb AbdullahОценок пока нет
- 19.2 First Order Differential EquationsДокумент19 страниц19.2 First Order Differential EquationsSalma SherbazОценок пока нет
- Modeling Falling RaindropsДокумент8 страницModeling Falling Raindropsohsnap1017Оценок пока нет
- Ordinary Differential Equation PDFДокумент12 страницOrdinary Differential Equation PDFedisonmalahitoОценок пока нет
- Perfect Bell Nozzle Parametric and Optimization Curves: Nasa Reference Publication 1104Документ31 страницаPerfect Bell Nozzle Parametric and Optimization Curves: Nasa Reference Publication 1104DjokabОценок пока нет
- Losses in PipesДокумент52 страницыLosses in PipesAkhil ShettyОценок пока нет
- VD Chap - Road LoadsДокумент41 страницаVD Chap - Road LoadsbmdbmdbmdОценок пока нет
- Laminar & Turbulent Flow PDFДокумент7 страницLaminar & Turbulent Flow PDFAli AimranОценок пока нет
- Surface Integral Methods in Computational AeroacousticsДокумент34 страницыSurface Integral Methods in Computational AeroacousticsMohammadreza NaghaviОценок пока нет
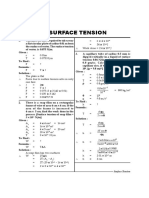
- SurfacetensДокумент5 страницSurfacetensomОценок пока нет
- Centripetal Force in Uniform Circular Motion Problems and SolutionsДокумент1 страницаCentripetal Force in Uniform Circular Motion Problems and SolutionsBasic PhysicsОценок пока нет
- NPTEL Fluid Mechanics SyllabusДокумент4 страницыNPTEL Fluid Mechanics SyllabusPradeep KumarОценок пока нет
- Preliminiary TreatmentДокумент22 страницыPreliminiary TreatmentIsmail toro100% (1)
- Directional Solenoid and Pneumatic ValvesДокумент176 страницDirectional Solenoid and Pneumatic ValvesKelvin Viza SoraideОценок пока нет
- General Physics Worksheet-II of 2014Документ4 страницыGeneral Physics Worksheet-II of 2014firaolmmОценок пока нет
- Bernoulli's PrincipleДокумент12 страницBernoulli's PrincipleepaeseОценок пока нет
- Pumps and Pumping SystemsДокумент88 страницPumps and Pumping SystemssrathinakumarОценок пока нет
- Sample Problems PhysiДокумент13 страницSample Problems PhysiSaeym SegoviaОценок пока нет
- Orifice Plate Meter: Jayson Utleg Vincent LabaroДокумент9 страницOrifice Plate Meter: Jayson Utleg Vincent LabaroNathalieAnneLopezОценок пока нет
- Ballistics Charts - Weatherby, IncДокумент6 страницBallistics Charts - Weatherby, Incmj78fjf6krОценок пока нет
- Irrigation Water PumpsДокумент13 страницIrrigation Water Pumpshhghgh0% (1)
- Microfluidics: Basic PrinciplesДокумент53 страницыMicrofluidics: Basic PrinciplesSalman Ahmed KhanОценок пока нет
- Fluid Mechanics White 7th SOL Part1 Part13Документ4 страницыFluid Mechanics White 7th SOL Part1 Part13Jose EscobarОценок пока нет
- Vector Operations and Kinematics ProblemsДокумент1 страницаVector Operations and Kinematics ProblemsSali IqraОценок пока нет
- Template - CE-36 LQ-1F (2021)Документ2 страницыTemplate - CE-36 LQ-1F (2021)Regine DoronilaОценок пока нет
- Hyva Valves GuideДокумент14 страницHyva Valves GuideYasir RehmanОценок пока нет
- How Planes Fly: Understanding Lift, Thrust, Drag and Weight in 40 CharactersДокумент1 страницаHow Planes Fly: Understanding Lift, Thrust, Drag and Weight in 40 CharactersbjsdkmlОценок пока нет
- Fluid Flow Equations and ConceptsДокумент31 страницаFluid Flow Equations and ConceptsJabin Sta. TeresaОценок пока нет
- Laws of MotionДокумент57 страницLaws of MotionakinaasirОценок пока нет
- Fluid friction and head loss in smooth bore pipesДокумент9 страницFluid friction and head loss in smooth bore pipesMuhammad Khoirul AnwarОценок пока нет
- Experiment 5 Series and Parallel PumpДокумент20 страницExperiment 5 Series and Parallel Pumpgongweejie9333% (3)
- Ansys CFDДокумент76 страницAnsys CFDBawers MontanoОценок пока нет
- A Single Formmula For Law of The WallДокумент4 страницыA Single Formmula For Law of The Wallitssid19Оценок пока нет
- Data Sheet GS4 80-400-438 B 37Документ4 страницыData Sheet GS4 80-400-438 B 37arshin wildanОценок пока нет
- A Brief History of Time: From the Big Bang to Black HolesОт EverandA Brief History of Time: From the Big Bang to Black HolesРейтинг: 4 из 5 звезд4/5 (2193)
- Quantum Physics for Beginners Who Flunked Math And Science: Quantum Mechanics And Physics Made Easy Guide In Plain Simple EnglishОт EverandQuantum Physics for Beginners Who Flunked Math And Science: Quantum Mechanics And Physics Made Easy Guide In Plain Simple EnglishРейтинг: 4.5 из 5 звезд4.5/5 (18)
- Summary and Interpretation of Reality TransurfingОт EverandSummary and Interpretation of Reality TransurfingРейтинг: 5 из 5 звезд5/5 (5)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeОт EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeОценок пока нет
- When the Earth Had Two Moons: Cannibal Planets, Icy Giants, Dirty Comets, Dreadful Orbits, and the Origins of the Night SkyОт EverandWhen the Earth Had Two Moons: Cannibal Planets, Icy Giants, Dirty Comets, Dreadful Orbits, and the Origins of the Night SkyРейтинг: 3 из 5 звезд3/5 (7)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessОт EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessРейтинг: 4 из 5 звезд4/5 (6)
- The Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismОт EverandThe Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismРейтинг: 4 из 5 звезд4/5 (500)
- Too Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldОт EverandToo Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldРейтинг: 4.5 из 5 звезд4.5/5 (8)
- Strange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsОт EverandStrange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsРейтинг: 4 из 5 звезд4/5 (94)
- The Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceОт EverandThe Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceРейтинг: 4.5 из 5 звезд4.5/5 (23)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterОт EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterРейтинг: 4.5 из 5 звезд4.5/5 (409)
- What is Life?: With Mind and Matter and Autobiographical SketchesОт EverandWhat is Life?: With Mind and Matter and Autobiographical SketchesРейтинг: 4 из 5 звезд4/5 (139)
- Packing for Mars: The Curious Science of Life in the VoidОт EverandPacking for Mars: The Curious Science of Life in the VoidРейтинг: 4 из 5 звезд4/5 (1395)
- The Beginning of Infinity: Explanations That Transform the WorldОт EverandThe Beginning of Infinity: Explanations That Transform the WorldРейтинг: 5 из 5 звезд5/5 (60)
- Bedeviled: A Shadow History of Demons in ScienceОт EverandBedeviled: A Shadow History of Demons in ScienceРейтинг: 5 из 5 звезд5/5 (5)
- Quantum Physics: What Everyone Needs to KnowОт EverandQuantum Physics: What Everyone Needs to KnowРейтинг: 4.5 из 5 звезд4.5/5 (48)
- The Holographic Universe: The Revolutionary Theory of RealityОт EverandThe Holographic Universe: The Revolutionary Theory of RealityРейтинг: 4.5 из 5 звезд4.5/5 (75)
- The Sounds of Life: How Digital Technology Is Bringing Us Closer to the Worlds of Animals and PlantsОт EverandThe Sounds of Life: How Digital Technology Is Bringing Us Closer to the Worlds of Animals and PlantsРейтинг: 5 из 5 звезд5/5 (5)
- Lost in Math: How Beauty Leads Physics AstrayОт EverandLost in Math: How Beauty Leads Physics AstrayРейтинг: 4.5 из 5 звезд4.5/5 (125)
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldОт EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldРейтинг: 4.5 из 5 звезд4.5/5 (53)
- Chasing Heisenberg: The Race for the Atom BombОт EverandChasing Heisenberg: The Race for the Atom BombРейтинг: 4.5 из 5 звезд4.5/5 (8)
- Quantum Physics for Beginners: Simple Illustrated Guide to Discover with Practical Explanations the Paradoxes of the Life and Universe Reconsidering RealityОт EverandQuantum Physics for Beginners: Simple Illustrated Guide to Discover with Practical Explanations the Paradoxes of the Life and Universe Reconsidering RealityРейтинг: 2 из 5 звезд2/5 (1)
- The Dancing Wu Li Masters: An Overview of the New PhysicsОт EverandThe Dancing Wu Li Masters: An Overview of the New PhysicsРейтинг: 4 из 5 звезд4/5 (182)
- The End of Everything: (Astrophysically Speaking)От EverandThe End of Everything: (Astrophysically Speaking)Рейтинг: 4.5 из 5 звезд4.5/5 (155)